从零开始学习PX4源码16(姿态控制器中的参数)
目录
文章目录
- 目录
- 摘要
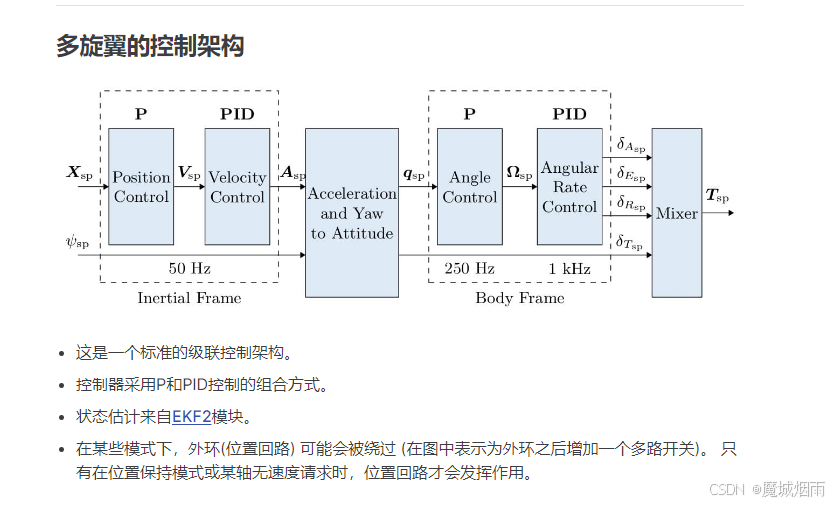
- 1.姿态控制器流程
- 2.姿态控制器中的参数
- 3.姿态控制器核心代码
摘要
本节主要记录姿态控制中常用的7个参数,为后续调参或者看代码做准备。
1.姿态控制器流程
2.姿态控制器中的参数

下面是对应的代码:
/**
* @file mc_att_control_params.c
* Parameters for multicopter attitude controller.参数关于多旋翼姿态控制器参数
*
* @author Lorenz Meier <lorenz@px4.io>
* @author Anton Babushkin <anton@px4.io>
*/
/**
* Roll P gain------横滚角P增益
*
*