HAL_TIM_IC_CaptureCallback 函数
# 【STM32输入捕获实战】HAL_TIM_IC_CaptureCallback函数详解与典型应用
## 摘要
`HAL_TIM_IC_CaptureCallback`是STM32 HAL库中处理输入捕获中断的核心回调函数。本文将深入剖析其工作原理,结合电机测速、频率测量等实际案例,系统讲解输入捕获功能的实现方法与优化技巧。
## 一、输入捕获原理与核心机制
### 1. 硬件基础
- **捕获通道**:TIMx_CH1~CH4对应不同的GPIO引脚(如TIM2_CH1对应PA0)
- **捕获寄存器**:CCR1~CCR4存储捕获时刻的计数器值
- **边沿检测**:支持上升沿、下降沿或双边沿捕获
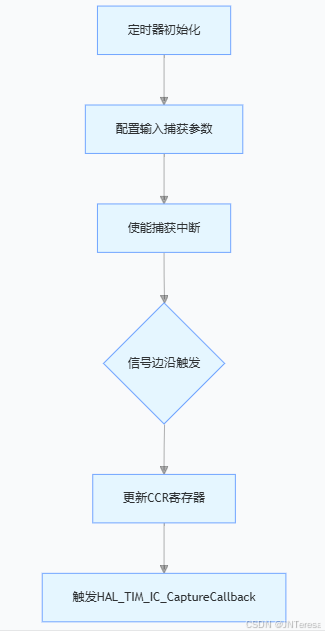
### 2. 软件流程
```mermaid
graph TD
A[定时器初始化] --> B[配置输入捕获参数]
B --> C[使能捕获中断]
C --> D{信号边沿触发}
D --> E[更新CCR寄存器]
E --> F[触发HAL_TIM_IC_CaptureCallback]
```
## 二、关键函数与参数解析
### 1. 初始化配置
```c
TIM_IC_InitTypeDef sConfigIC;
sConfigIC.ICPolarity = TIM_INPUTCHANNELPOLARITY_RISING; // 上升沿捕获
sConfigIC.ICSelection = TIM_ICSELECTION_DIRECTTI; // 直接映射TI1
sConfigIC.ICPrescaler = TIM_ICPSC_DIV1; // 无预分频
sConfigIC.ICFilter = 0x03; // 4个采样周期滤波
HAL_TIM_IC_Init(&htim2, &sConfigIC);
```
### 2. 启动捕获
```c
HAL_TIM_IC_Start_IT(&htim2, TIM_CHANNEL_1); // 中断模式
// 或
HAL_TIM_IC_Start_DMA(&htim2, TIM_CHANNEL_1, &capture_buf, 1); // DMA模式
```
### 3. 回调函数原型
```c
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim) {
if (htim->Instance == TIM2) {
switch(htim->Channel) {
case HAL_TIM_ACTIVE_CHANNEL_1:
// 处理通道1的捕获事件
break;
}
}
}
```
## 三、典型应用场景实现
### 1. 脉冲宽度测量
```c
volatile uint32_t capture1 = 0, capture2 = 0;
volatile uint8_t state = 0;
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim) {
if (htim->Instance == TIM2) {
if (state == 0) {
capture1 = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_1);
__HAL_TIM_SET_CAPTUREPOLARITY(htim, TIM_CHANNEL_1, TIM_INPUTCHANNELPOLARITY_FALLING);
state = 1;
} else {
capture2 = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_1);
uint32_t pulse_width = capture2 - capture1;
__HAL_TIM_SET_CAPTUREPOLARITY(htim, TIM_CHANNEL_1, TIM_INPUTCHANNELPOLARITY_RISING);
state = 0;
}
}
}
```
### 2. 编码器测速
```c
volatile int32_t encoder_count = 0;
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim) {
if (htim->Instance == TIM3) {
uint32_t capture = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_1);
static uint32_t prev_capture = 0;
if (capture > prev_capture) {
encoder_count += (capture - prev_capture);
} else {
encoder_count -= (prev_capture - capture);
}
prev_capture = capture;
}
}
```
## 四、高级优化技巧
### 1. 抗干扰设计
- **滤波配置**:通过`ICFilter`参数设置采样周期(如0x03表示4个采样周期)
- **双沿捕获**:同时检测上升沿和下降沿,提高信号完整性
### 2. 高精度测量
```c
// 计算捕获差值时处理计数器溢出
uint32_t get_capture_delta(TIM_HandleTypeDef *htim, uint32_t current, uint32_t previous) {
if (current >= previous) {
return current - previous;
} else {
return (htim->Init.Period + 1) - (previous - current);
}
}
```
### 3. 多通道同步捕获
```c
void HAL_TIM_IC_MspInit(TIM_HandleTypeDef *htim) {
if (htim->Instance == TIM4) {
__HAL_RCC_TIM4_CLK_ENABLE();
HAL_NVIC_SetPriority(TIM4_IRQn, 2, 0);
HAL_NVIC_EnableIRQ(TIM4_IRQn);
}
}
// 在回调函数中处理多个通道
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim) {
if (htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1) {
// 处理CH1捕获
} else if (htim->Channel == HAL_TIM_ACTIVE_CHANNEL_2) {
// 处理CH2捕获
}
}
```
## 五、常见问题与解决方案
| 问题现象 | 可能原因 | 解决方法 |
|-------------------------|-----------------------------------|-----------------------------------|
| 回调函数不触发 | 中断优先级未配置 | 使用CubeMX配置NVIC |
| 测量值异常跳动 | 未启用输入滤波 | 设置`ICFilter`参数 |
| 双通道捕获不同步 | 定时器时钟未同步 | 配置主从触发模式 |
| 高速信号丢失 | 预分频系数过大 | 优化`Prescaler`和`Period`参数 |
## 六、性能优化建议
1. **DMA辅助捕获**:使用`HAL_TIM_IC_Start_DMA()`避免中断频繁触发
2. **中断嵌套控制**:通过`HAL_NVIC_SetPriority()`设置合理优先级
3. **缓存捕获值**:在回调函数中立即读取CCR值,避免寄存器状态变化
4. **低功耗模式**:使用TIM的时钟门控功能降低待机功耗
## 总结
`HAL_TIM_IC_CaptureCallback`函数是实现STM32输入捕获功能的核心接口。通过合理配置捕获参数、优化中断处理逻辑,结合实际应用场景的算法设计,可以实现高精度的信号测量与实时控制。建议开发者结合CubeMX生成初始化代码,重点关注中断服务函数与回调函数的协同工作机制,在实际项目中不断积累调参经验。
如果需要进一步探讨特定应用场景的实现细节,欢迎留言交流!