三相永磁同步电机的控制方法之六步换向控制(Six-Step Commutation)
三相永磁同步电机的控制方法之六步换向控制(Six-Step Commutation)
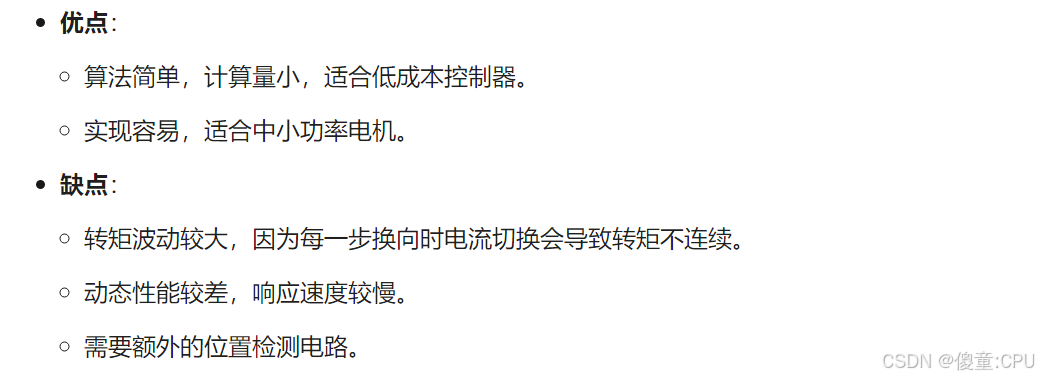
六步换向控制(Six-Step Commutation)是一种简单的三相无刷直流电机(BLDC)或永磁同步电机(PMSM)的控制方法。它通过依次切换三相绕组的电流方向,产生旋转磁场,驱动电机运行。与矢量控制(FOC)相比,六步换向控制算法简单,计算量小,适合低成本、低性能要求的场景。
- 基本原理

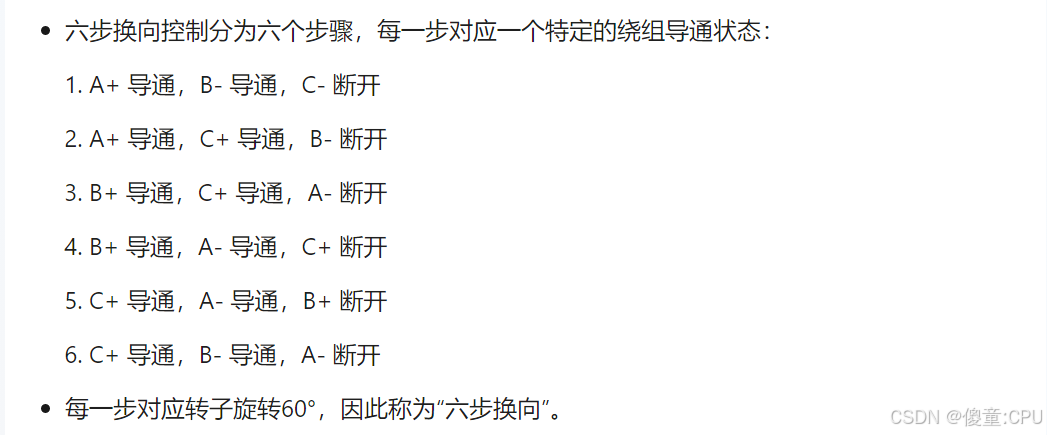
- 换向顺序
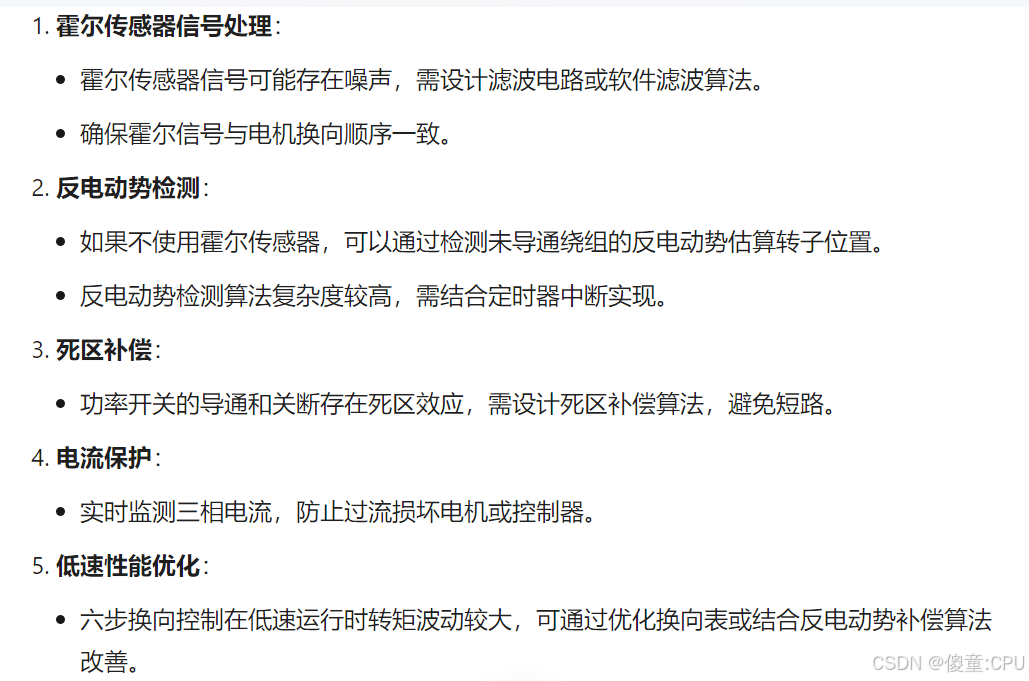
- 转子位置检测

- 优点与缺点
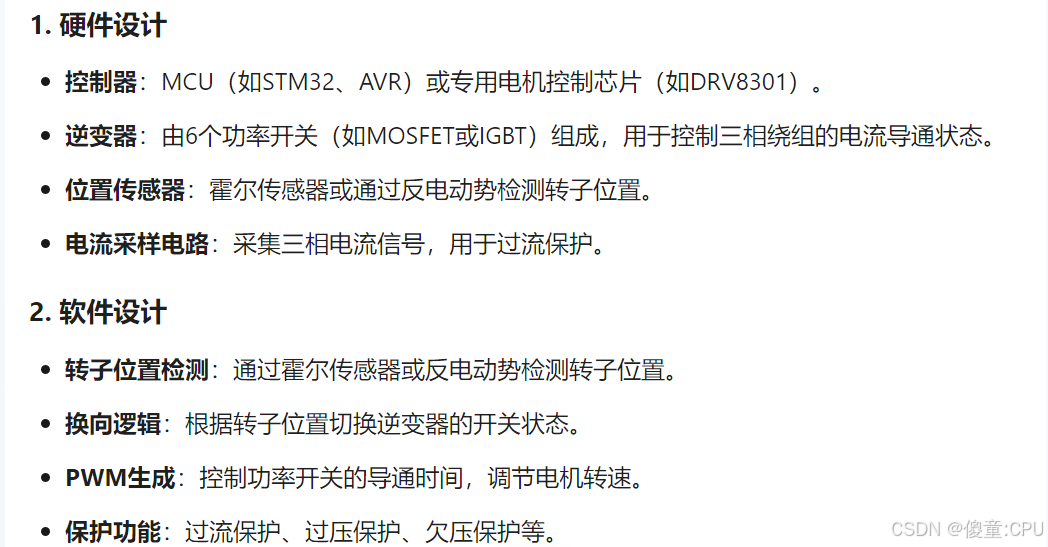
六步换向控制的设计
以下是一个简化的六步换向控制的C语言实现案例,假设电机为三相无刷直流电机(BLDC),使用STM32微控制器。
- 定义换向表
六步换向的每一步对应一个特定的绕组导通状态,可以用一个数组表示。
// 定义六步换向表,每个元素对应一个开关状态
// 0: 断开, 1: 导通
// A相高侧开关: HA, A相低侧开关: LA
// B相高侧开关: HB, B相低侧开关: LB
// C相高侧开关: HC, C相低侧开关: LC
const uint8_t commutation_table[6][6] = {
{1, 0, 0, 0, 1, 0}, // Step 1: HA, LC
{1, 0, 0, 1, 0, 0}, // Step 2: HA, LB
{0, 0, 1, 1, 0, 0}, // Step 3: HB, LA
{0, 1, 1, 0, 0, 0}, // Step 4: HB, LC
{0, 1, 0, 0, 0, 1}, // Step 5: HC, LA
{1, 0, 0, 0, 0, 1} // Step 6: HC, LB
};
- 转子位置检测
假设使用霍尔传感器检测转子位置,霍尔传感器的信号对应换向表中的步骤。
// 获取霍尔传感器信号
uint8_t Get_Hall_Signal() {
// 假设霍尔传感器信号为3位输入(Hall_A, Hall_B, Hall_C)
uint8_t hall_state = (Hall_A << 2) | (Hall_B << 1) | Hall_C;
// 将霍尔信号映射到换向表索引
return hall_state & 0x05; // 简化映射逻辑
}
- 换向逻辑
根据霍尔传感器信号选择换向表中的开关状态,并控制逆变器。
void Commutation_Control() {
uint8_t hall_state = Get_Hall_Signal(); // 获取霍尔传感器信号
uint8_t step = hall_state & 0x05; // 映射到换向表索引
// 获取当前步的开关状态
uint8_t ha = commutation_table[step][0]; // A相高侧
uint8_t la = commutation_table[step][1]; // A相低侧
uint8_t hb = commutation_table[step][2]; // B相高侧
uint8_t lb = commutation_table[step][3]; // B相低侧
uint8_t hc = commutation_table[step][4]; // C相高侧
uint8_t lc = commutation_table[step][5]; // C相低侧
// 控制逆变器开关
Set_Switch(HA_PIN, ha); // 设置A相高侧开关
Set_Switch(LA_PIN, la); // 设置A相低侧开关
Set_Switch(HB_PIN, hb); // 设置B相高侧开关
Set_Switch(LB_PIN, lb); // 设置B相低侧开关
Set_Switch(HC_PIN, hc); // 设置C相高侧开关
Set_Switch(LC_PIN, lc); // 设置C相低侧开关
}
- PWM生成
通过PWM控制功率开关的导通时间,调节电机转速。
void Set_PWM_DutyCycle(uint8_t duty_cycle) {
// 设置PWM占空比(假设使用STM32 HAL库)
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, duty_cycle); // A相高侧
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_2, duty_cycle); // B相高侧
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_3, duty_cycle); // C相高侧
}
- 主控制循环
在主循环中调用换向逻辑和PWM设置函数。
int main(void) {
HAL_Init();
SystemClock_Config();
MX_TIM1_Init(); // 初始化PWM定时器
while (1) {
Commutation_Control(); // 执行换向逻辑
Set_PWM_DutyCycle(50); // 设置PWM占空比(示例值)
HAL_Delay(1); // 延时(实际应用中不需要)
}
}
实际应用中的注意事项