基于粒子群算法(PSO)栅格地图移动机器人路径规划
一 PSO算法概念
粒子群算法(Particle Swarm Optimization, PSO)是一种基于群体智能的优化算法,由Eberhart和Kennedy在1995年提出。它受到鸟群觅食行为的启发,通过模拟鸟群或鱼群等生物群体的社会行为来进行问题求解。在自然界中,无论是鸟群的迁徙还是鱼群的觅食,生物群体展现出了惊人的智能行为。粒子群算法正是从这些自然现象中汲取灵感,发展出一种高效的优化方法。
1 粒子(Particle):在PSO中,每个粒子代表一个可能的解。想象一下,每个粒子就像是一个小机器人,它在寻找问题的最佳解决方案。
2 群体(Swarm):所有的粒子一起形成一个群体,就像是一群鸟或鱼在寻找食物。
粒子群算法的提出,源于对生物群体行为的观察。在群体中,每个个体(粒子)通过简单的行为规则,如跟随、避障等,实现了复杂的群体动态。Eberhart和Kennedy将这种群体智能转化为算法,用于解决优化问题,每个粒子有两个主要属性:
1 位置(Position):表示当前的解。粒子的当前位置就是它认为的潜在最优解。
2 速度(Velocity):决定了粒子的移动方向和速度。通过调整速度,粒子可以在解空间中探索新的位置
二 PSO算法更新原则
粒子群算法中,每个解被视为搜索空间中的一个“粒子”,每个粒子代表了问题的潜在解。粒子在搜索空间中飞行,通过跟踪两个“极值”来更新自己的位置:
1. 个体极值:粒子自身所找到的最优解。
2. 全局极值:整个粒子群所找到的最优解。
粒子的速度和位置更新遵循以下公式:
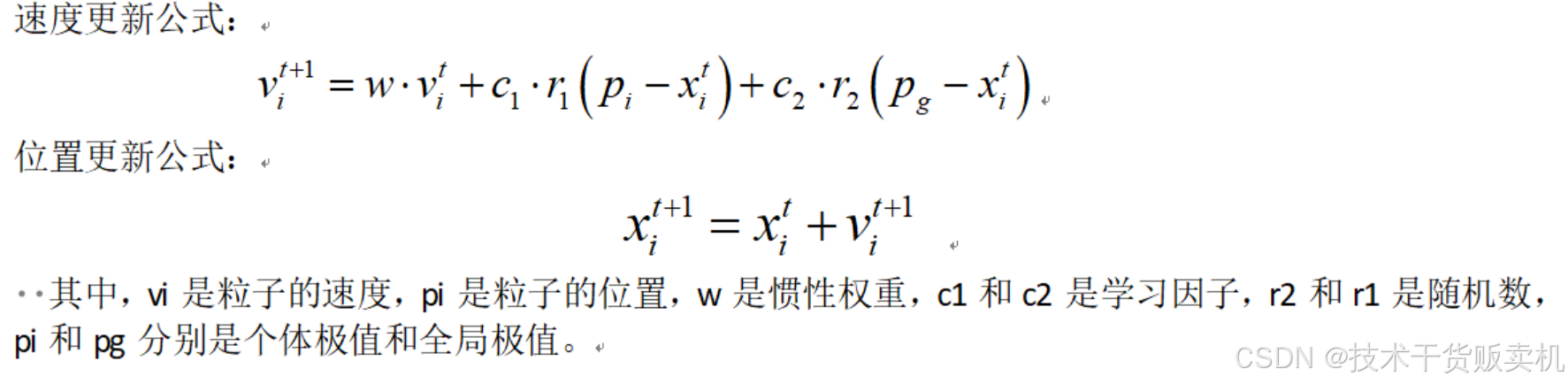
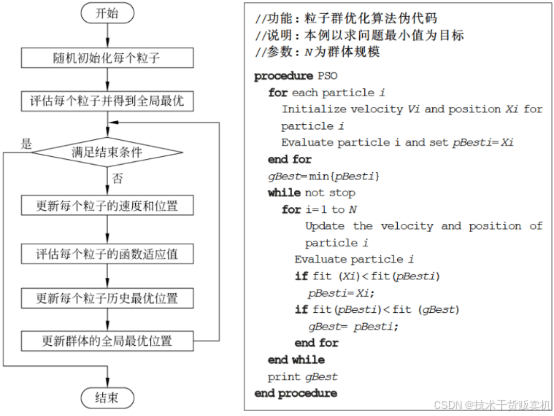
三 算法流程图
PSO的核心思想是通过粒子的位置和速度来不断迭代,逐步逼近最优解。
具体步骤如下:
1. 初始化:随机生成一群粒子的位置和速度
2. 评价:计算每个粒子的适应度值。
3. 更新个体极值:如果当前粒子的适应度优于个体历史最佳,更新个体极值。
4. 更新全局极值:如果当前粒子的适应度优于全局历史最佳,更新全局极值。
5. 更新速度和位置:根据上述公式更新每个粒子的速度和位置。
6. 迭代:重复步骤2-5,直到满足停止条件。
四 环境模型构建
粒子群算法因其简单、高效而广泛应用于函数优化、神经网络训练、模式识别等领域。移动机器人路径规划是机器人领域中研究的一个重要问题,其目的是在给定环境中找到一条最短或最优的路径,以完成机器人的任务。在这个过程中,环境模型是非常关键的,本文在移动机器人路径规划的研究中,利用栅格法创建环境模型,栅格图如图所示。
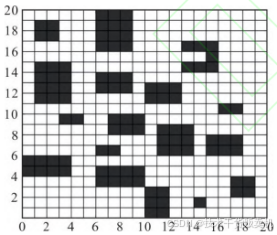
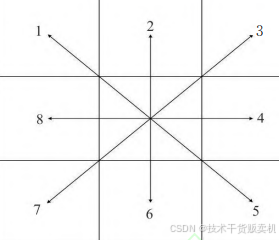
图:栅格地图 图:移动方向
栅格法:将移动机器人所处的环境空间分成多个大小相等的正方形栅格,然后用黑白2种颜色来标识障碍物和空白可通行区域。
具体来说,障碍物所对应的栅格为黑色,绘制栅格图时使用1来代表;空白可通行的区域所对应的栅格为白色, 在矩阵中使用0来代表。
在栅格地图中,移动机器人共有8个方向可以移动,机器人可以沿着空白可通行区域所对应的栅格移动,但不能向障碍物对应的栅格移动,移动机器人的移动方向如图所示。
PSO代码
% Particle Swarm Optimization
function [gBestScore,gBest,cg_curve]=PSO(N,iter,lb,ub,dim,y)
%PSO Infotmation
Vmax=ones(1,dim).*(ub-lb).*0.15; %速度最大值
noP=N;
w=0.7;
c1=1.2;
c2=1.2;
% Initializations
vel=zeros(noP,dim);
pBestScore=zeros(noP);
pBest=zeros(noP,dim);
gBest=zeros(1,dim);
cg_curve=zeros(1,iter);
% Random initialization for agents.
pos = repmat(lb,N,1)+rand(N,dim).* repmat((ub-lb),N,1);
for i=1:noP
pBestScore(i)=inf;
end
% Initialize gBestScore for a minimization problem
gBestScore=inf;
for l=1:iter
% Return back the particles that go beyond the boundaries of the search space
for i=1:size(pos,1)
Flag4ub=pos(i,:)>ub;
Flag4lb=pos(i,:)<lb;
pos(i,:)=(pos(i,:).*(~(Flag4ub+Flag4lb)))+ub.*Flag4ub+lb.*Flag4lb;
end
for i=1:size(pos,1)
%Calculate objective function for each particle
fitness= y(pos(i,:));
if(pBestScore(i)>fitness)
pBestScore(i)=fitness;
pBest(i,:)=pos(i,:);
end
if(gBestScore>fitness)
gBestScore=fitness;
gBest=pos(i,:);
end
end
%Update the W of PSO
%Update the Velocity and Position of particles
for i=1:size(pos,1)
for j=1:size(pos,2)
vel(i,j)=w*vel(i,j)+c1*rand()*(pBest(i,j)-pos(i,j))+c2*rand()*(gBest(j)-pos(i,j));
if(vel(i,j)>Vmax(j))
vel(i,j)=Vmax(j);
end
if(vel(i,j)<-Vmax(j))
vel(i,j)=-Vmax(j);
end
pos(i,j)=pos(i,j)+vel(i,j);
end
end
cg_curve(l)=gBestScore;
% disp(['PSO: At iteration ', num2str(l), ' ,the best fitness is ', num2str(gBestScore)])
end
end