STM32F407 CAN参数配置 500Kbps
本篇CAN参数适用
- 芯片型号:STM32F407xx
- 系统时钟:168MHz,CAN挂载总线APB1为42M
- 波 特 率 :500Kpbs
- 引脚使用:TX_PB9,RX_PB8;修改为PA11+PA12后,参数不变。
步骤一、打勾开启CAN,并配置波特率

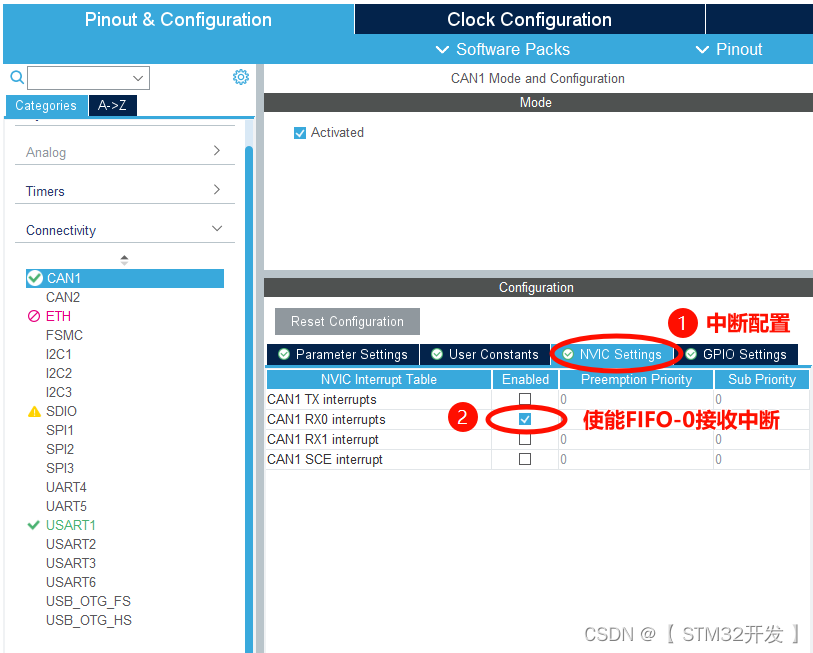
步骤二、打开FIFO-0的接收中断
也可以使用FIFO-1,注意配合修改中断回调函数。
步骤三、修改使用的引脚
一定要查对原理图,因为CAN1有两组引脚可用:PA11+PA12, PB8+PB9;
如果引脚选错,往往会浪费很多时间在正确的代码上找错误。
