电机控制常见面试问题(二)
文章目录
- 一、小电感对电机的影响
- 二、转子位置识别
- 1.传感器法
- 2.无传感器
- 三.选择电机和驱动器时通常考虑哪些关键参数
- 四.介绍下mpc(模型预测控制)
- 五.对于电机控制硬件设计的理解
- 六.参数辨识在电机控制系统中扮演什么角色
一、小电感对电机的影响
电感越小,相同电流下储存的磁场能量越少,导致 扭矩输出降低。但同时响应速度会更快,电机对电压突变更敏感,带宽提升有利于高频控制。
二、转子位置识别
1.传感器法
霍尔传感器:通过检测永磁体磁场变化输出脉冲,但存在机械安装误差和温度漂移。
编码器:分为增量式(仅测相对位移)和绝对式(直接测绝对位置),精度高但体积大且易受电磁干扰。
旋转变压器:基于电磁感应原理测量线性位移,常用于高精度伺服系统。
优点:可靠性高,实现简单。
缺点:增加系统成本和体积,不适合恶劣环境(如高温、高振动)。
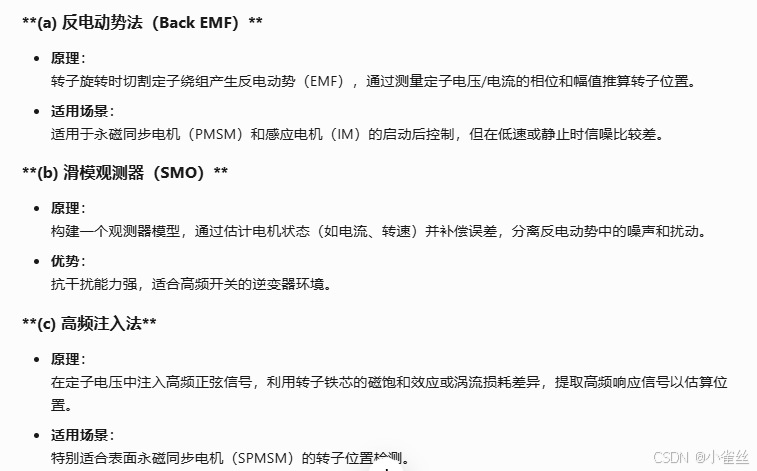
2.无传感器
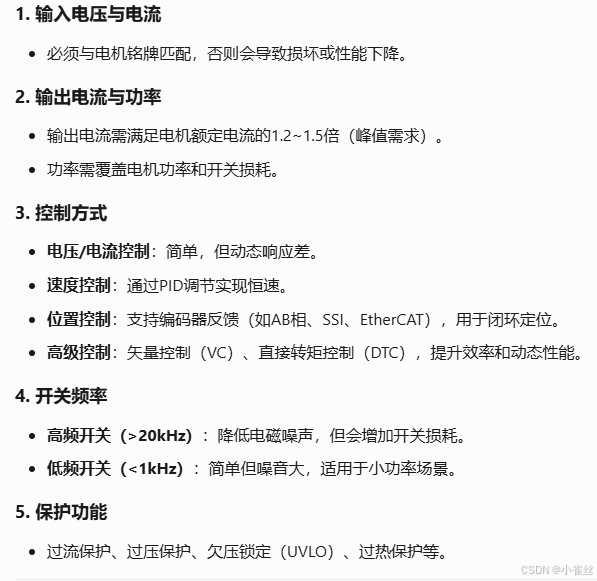
三.选择电机和驱动器时通常考虑哪些关键参数
电机:功率(直接影响负载能力),扭矩,转速,电压电流
驱动器:
选型流程建议
明确需求:确定负载类型、速度范围、精度要求。
初步筛选:基于功率、电压、转速缩小电机类型(如PMSM vs. IM)。
驱动器匹配:选择支持所需控制模式和保护功能的驱动器。
验证参数:检查热定额(THD)、EMC兼容性、机械接口尺寸。
测试与优化:样机测试后调整参数(如PID增益、电流限幅)。
四.介绍下mpc(模型预测控制)
模型预测控制(MPC)是一种基于动态模型预测和滚动优化的先进控制策略,其核心思想是在每个采样周期内,通过求解有限时域内的最优控制序列(如二次规划),实现多目标优化(如转矩/速度跟踪、能耗最小化)并自动满足输入/输出约束(如电压、电流限幅)。相较于传统PID或FOC,MPC的优势在于:
多变量协调:可同时优化电流、转矩、速度等耦合变量,避免复杂的前馈补偿;
强约束处理:内置硬性约束保护(如电池电压、开关频率),提升系统鲁棒性;
抗干扰性:对参数变化和负载扰动有更好的适应性;
能量优化:通过最小化能耗目标函数延长设备寿命(如电动汽车、无人机)。
典型应用包括永磁同步电机(PMSM)的高效调速、工业电机的多轴协同控制等。尽管其计算复杂度高且依赖模型精度,但随着硬件加速(如FPGA)和算法优化(如近似线性规划),MPC已成为高精度、高动态场景的主流控制方案。
多变量协调"是什么意思?
电机控制中,多个物理量需要同时被控制,比如电流、电压、转速、转矩、温度等。这些量之间会互相影响(比如电流变大时,转矩会变大,但温度也会升高)。
MPC能一次性考虑所有变量的关系,自动找到一个“平衡点”,让所有变量都满足要求。
类比:就像你同时要控制汽车的油门(转矩)、刹车(电流)、空调温度(能耗)——MPC会自动协调这些操作,而不是单独调一个再调另一个。
为什么重要?
传统方法(如PID)需要手动调整每个变量的控制器,容易出错。
举例:永磁同步电机(PMSM)需要同时控制励磁电流(影响磁场)和转矩电流(影响动力),MPC能自动让两者配合,避免工程师手动调参。
"能量优化"有什么用?
目标:
让电机运行得更省电,延长设备寿命(比如电动汽车能跑更远)。
在计算控制命令时,把“能耗最低”作为一个优化目标(比如优先选择更省电的电流波形)。
类比:你做饭时想省钱,会同时考虑电费(能耗)和菜的味道(控制性能)——MPC会在两者间找到平衡。
"强约束处理"能解决什么问题?
系统运行时有很多“限制条件”,比如:
电池电压不能超过上限(否则会损坏);
电机电流不能太大(否则会发热烧毁);
电梯升降速度必须安全(不能超速)。
MPC的处理方式:提前知道这些限制,并在计算控制命令时,“强制”让结果满足这些条件。
类比:就像你开车时,导航软件不仅规划路线,还会提醒你“前方限速60km/h”——MPC会主动避开“超速”或“超温”的危险操作。
为什么重要?
传统方法需要工程师手动设计“保护电路”(比如限流电阻),但MPC直接从算法层面保证安全,省去了很多硬件成本。
"抗干扰性"如何理解?
系统运行时总会遇到意外情况,比如:
电机突然被卡住(负载突变);
旁边有电器产生电磁噪声(干扰信号);
温度变化导致电机参数改变(如电阻变大)。
MPC的抗干扰能力:MPC会根据当前状态预测未来的干扰影响,并提前调整控制策略。
类比:你开车时听到前方有雷声,会提前减速——MPC类似这种“预判性操作”。
五.对于电机控制硬件设计的理解
电机硬件设计分为控制板,驱动板,传感器,电源设计
控制板:
执行控制算法(如PID、FOC、MPC),实时处理传感器反馈(电流、电压、位置)。
选型:计算能力、外设接口(支持PWM、ADC)、低功耗(如物联网设备)
驱动电路(如IGBT/MOSFET模块):
核心任务:将控制器的数字信号转化为大功率开关信号,驱动电机运转。
设计难点:开关损耗:高频开关(如SiC/GaN器件)虽高效但需复杂散热设计。
死区时间:避免上下桥臂直通短路,需精确设置时序。
电源设计:
输入输出隔离:防止高压/低压部分相互干扰(如工业电机需3000V隔离)。
动态响应:为高频开关器件(如驱动器)提供稳定瞬态电流(如采用多层陶瓷电容)。
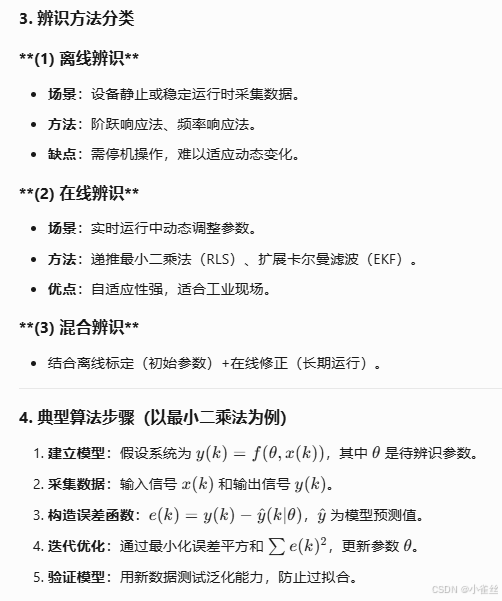
六.参数辨识在电机控制系统中扮演什么角色
参数辨识在电机控制系统中扮演着核心角色,它通过建立数学模型与实测数据的动态映射,实时识别电机绕组电阻、电感、转动惯量等关键参数偏差。随着工况变化(如温度漂移、负载突变),这些参数会产生非线性偏移,传统控制算法若采用固定参数模型会导致控制精度下降甚至系统失稳。参数辨识模块相当于给控制器装上了’自感知雷达’,它能在线采集电流电压信号,运用最小二乘法、粒子群优化等算法迭代更新模型参数,使PID控制器或现代控制策略始终贴近真实物理对象特性。
参数辨识是通过实验数据或观测信号,从系统模型中反推出未知参数的过程
参数辨识的核心作用:
消除“黑箱”:现实中电机/设备的参数(如电阻、电感、摩擦系数)无法直接测量,需通过输入输出数据推导。
动态补偿:设备老化、温度变化等因素会导致参数漂移,辨识技术可实时修正模型(如电动汽车电池内阻随温度变化)。
优化控制性能:精准参数使控制器(如PID、模型预测控制)计算更准确,减少超调、抖动等问题。