二叉树的拓展:平衡二叉树(定义,朴素c语言实现增删改查,平衡因子判断)通俗易懂
文章目录
- 平衡二叉查找树(AVL)(平衡二叉树)定义
- 失衡的情况分为4种(图示)
- 1、LL
- 2、RR
- 3、LR
- 4、RL型
- 二叉平衡树的插入
- 二叉平衡树的删除
- 代码实现:
- 一、每一个节点需要维护的结构体,在搜索树的基础上增加了属性->高度
- 二、有关高度的辅助函数
- 三、两种旋转情况
- 四、四种旋转情况:恢复平衡
- 五、AVL插入(增加平衡判断版)
- 六、AVL删除(增加平衡判断版)
- 总结
前情提要: 朴素c语言实现二叉树的概念和二叉搜索树(遍历,查找,删除,插入,更改)_c语言,删除二叉树(后序遍历)-CSDN博客

平衡二叉查找树(AVL)(平衡二叉树)定义
在二叉查找树中,有一种情况,就是当插入查找树的数据已经呈现一种有序的顺序,比如说一个已经排序好的数组array[10] = {0, 1, 2, 3, 4, 5, 6, 7, 8, 9},把这个数组中的元素依次插入到查找树中,就会造成一个现象,就是每插入的一个新的元素都在旧的元素的右边,这样一直插入下去,就给树插成一个链表了,这个树的效率就退化成O(n)了,为了避免这种情况,所以使用–平衡二叉查找树
参考文献:【平衡二叉树(AVL树)】 出错啦! - bilibili.com
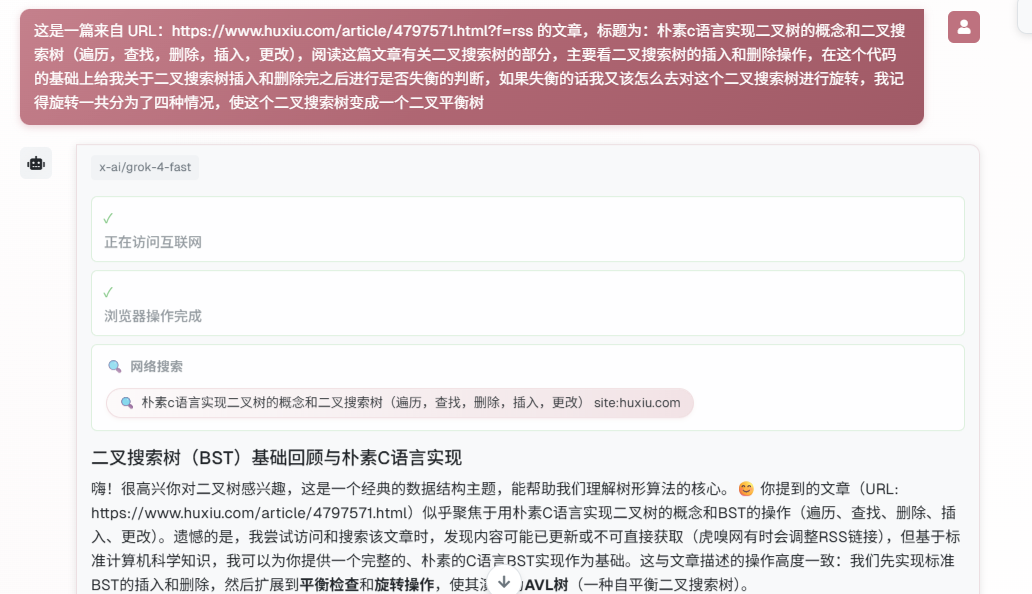
平衡二叉查找树的特点就是所有结点的(左子树高度-右子树高度)的绝对值<=1,其中这个左子树高度-右子树高度就是平衡因子
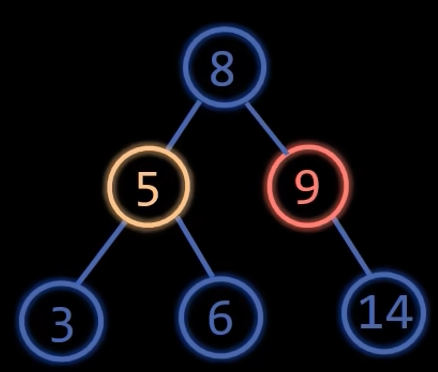
下图就是一颗平衡二叉树
依次类推,节点17,左子树没有,所以左子树高度就是0,右子树高度为1,所以节点17平衡因子就是-1,
由此也可以看出,平衡因子只能是-1,0,1的才是平衡二叉树
平衡二叉树的增删改查和二叉搜索树是一样的,同样参考前文
朴素c语言实现二叉树的概念和二叉搜索树(遍历,查找,删除,插入,更改)_c语言,删除二叉树(后序遍历)-CSDN博客

只是每次插入或者删除某个节点以后,需要多一个判断是否失衡的过程,这个失衡的过程,称为旋转
旋转也分为左旋和右旋,左旋和右旋的方式和区别,会在下面的四种失衡情况种详细介绍
失衡的情况分为4种(图示)
1、LL
因为节点3的插入,导致二叉搜索树的根节点失衡了,平衡因子为2,且根节点的左子树根节点的平衡节点为1,
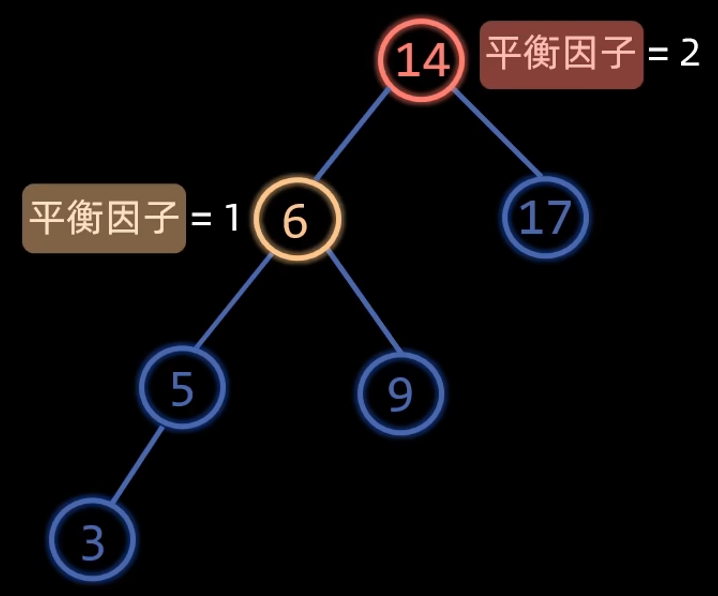
这种情况就是LL型失衡,需要右旋,下图就是右旋的过程
可以看到平衡因子为1的节点6变成了根节点,原来的根节点14变成了节点6的右子节点,节点6原来的右子节点9变成节点14的左节点,这就是网上常说的那句口诀:“冲突的右孩变左孩”。
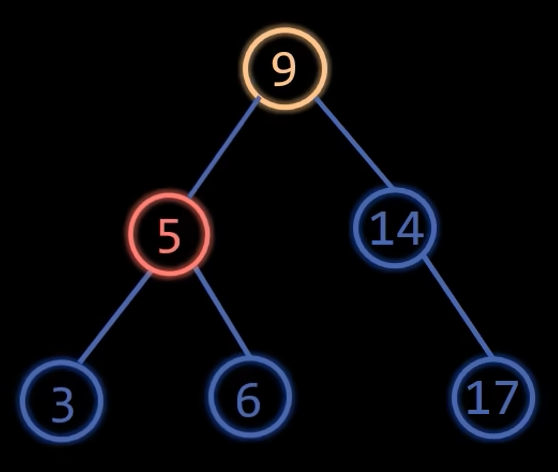
2、RR
同理可知,因为节点17的插入,导致二叉搜索树根节点失衡了,平衡因子为-2,且根节点的右子树根节点的平衡节点为-1
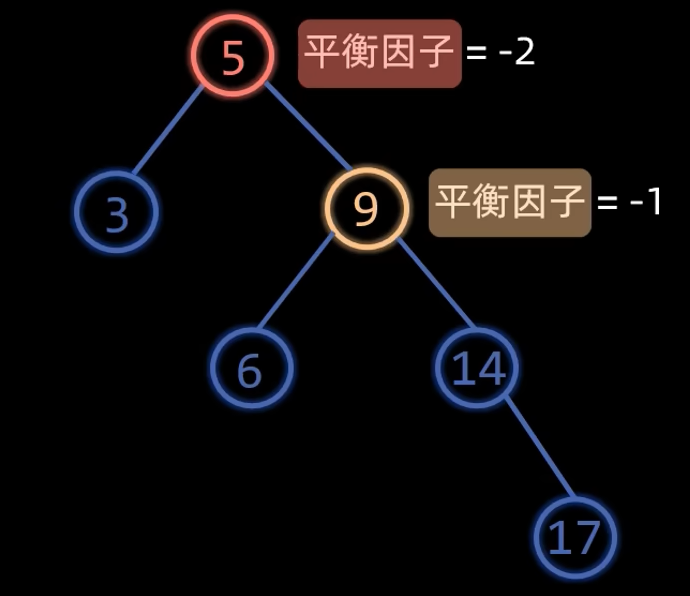
那就左旋,左旋原理跟右旋一样,口诀是:“冲突的左孩变右孩”;应该看的明白,不多赘述
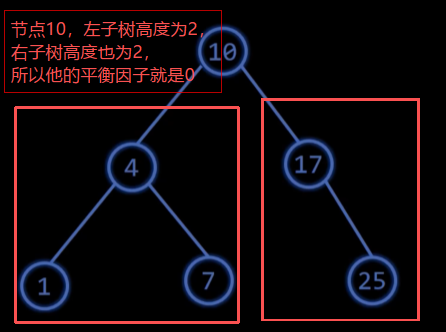
3、LR
LR型就是新插入的节点在左孩子的右子树上,导致根节点失衡了,根节点平衡因子为2,左孩子平衡因子为-1
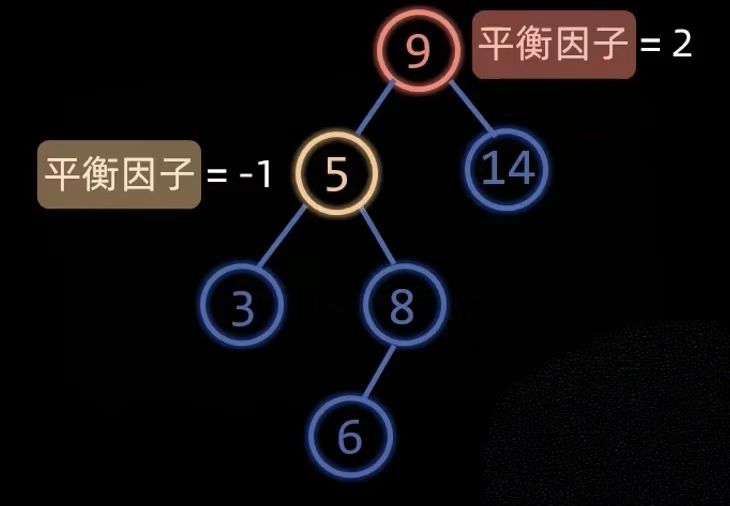
这种情况的话我们先左旋节点9的左孩子节点8,可以看到左旋节点8的过程也符合上文提到的左旋中:“冲突的左孩变右孩”相当于节点8左旋取代原本节点5的位置,然后节点5也左旋变成节点8的左孩子,原本节点8的左孩子就是口诀中提到的这个“冲突的左孩”。
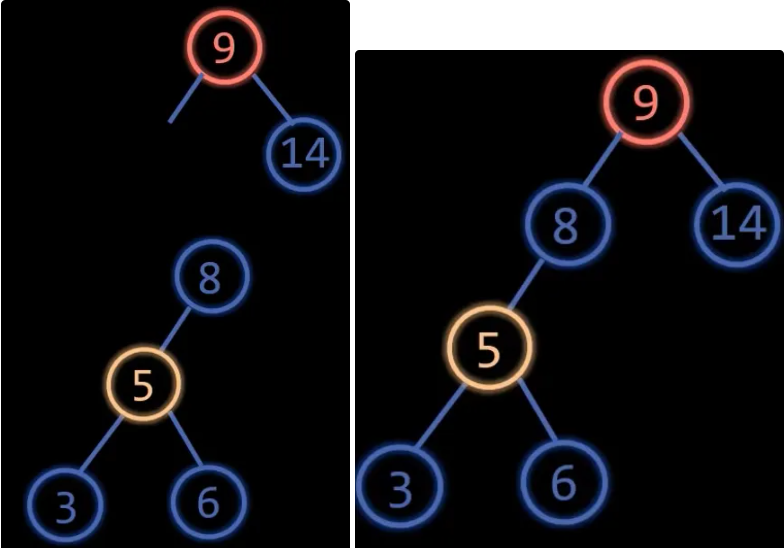
然后再右旋节点9,这一次的右旋没有冲突的节点
4、RL型
RL型就是新插入的节点在右孩子的左子树上,导致根节点失衡了,根节点平衡因子为-2,右孩子平衡因子为1
跟LR型原理一样,先右旋失衡节点的右孩子,然后再左旋失衡节点
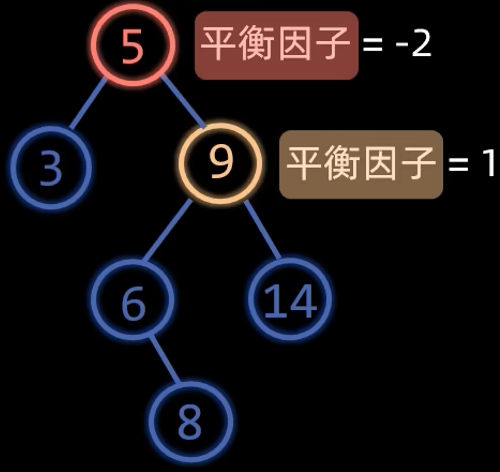
二叉平衡树的插入
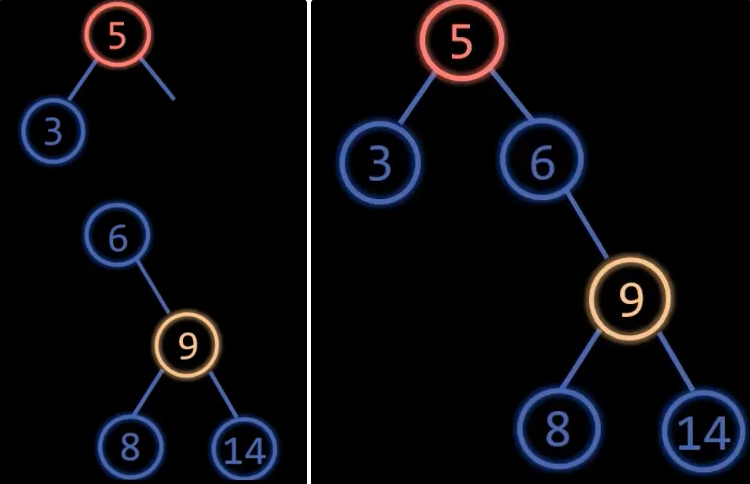
由于节点9的插入,导致树出现了两个失衡节点,这个时候只需要调整距离插入节点9最近的失衡节点就可以了
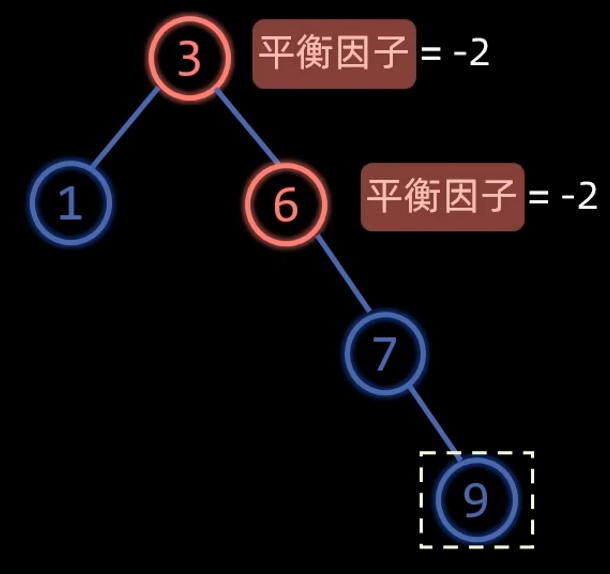
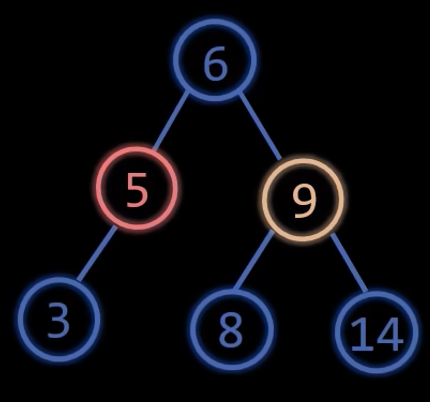
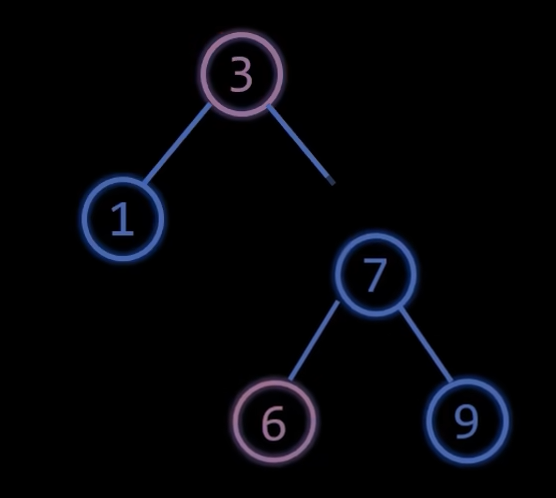
比如说直接左旋失衡节点6,然后就自动平衡了,所以当插入节点导致多个祖先节点失衡时,只需要调整距离插入节点最近的祖先节点即可
二叉平衡树的删除
删除的时候,跟插入不一样,插入的话只需要旋转距离插入节点最近的失衡节点即可,删除的话也需要先旋转距离插入节点最近的失衡节点,然后依次向上检查每一个祖先节点,因为,删除操作可能需要多次旋转祖先节点以保持平衡
代码实现:
请对照前情提要:二叉搜索树一起看
一、每一个节点需要维护的结构体,在搜索树的基础上增加了属性->高度
typedef struct AVLNode {int data;struct AVLNode* left;struct AVLNode* right;int height; // 新增:高度
} AVLNode;
二、有关高度的辅助函数
有关高度的辅助函数分为以下三个,十分通俗易懂
// 获取高度
int getHeight(AVLNode* node) {return (node == NULL) ? 0 : node->height;
}// 更新高度
void updateHeight(AVLNode* node) {if (node != NULL) {node->height = 1 + (getHeight(node->left) > getHeight(node->right) ? getHeight(node->left) : getHeight(node->right));}
}// 获取平衡因子BF
int getBF(AVLNode* node) {return (node == NULL) ? 0 : getHeight(node->left) - getHeight(node->right);
}
三、两种旋转情况
1、右旋
Z Y/ \ / \Y T4 -> X Z/ \ / \
X T3 T3 T4
AVLNode* rightRotate(AVLNode* z) {AVLNode* y = z->left;AVLNode* t3 = y->right;y->right = z;z->left = t3;updateHeight(z);updateHeight(y);return y;
}
2、左旋
Z Y/ \ / \T1 Y -> Z T4/ \ / \T2 T4 T1 T2
AVLNode* leftRotate(AVLNode* z) {AVLNode* y = z->right;AVLNode* t2 = y->left;y->left = z;z->right = t2;updateHeight(z);updateHeight(y);return y;
}
四、四种旋转情况:恢复平衡
1、LL
插入在左子树的左边。右旋根节点。
// bf是平衡因子
// LL的平衡因子判断条件
if (bf > 1 && data < node->left->data) {return rightRotate(node);
}
2、RR
插入在左子树的右边。先左旋左子树,再右旋根。
if (bf < -1 && data > node->right->data) {return leftRotate(node);
}
3、LR
插入在右子树的右边。左旋根节点。
if (bf > 1 && data > node->left->data) {node->left = leftRotate(node->left);return rightRotate(node);
}
4、RL
插入在右子树的左边。先右旋右子树,再左旋根。
if (bf < -1 && data < node->right->data) {node->right = rightRotate(node->right);return leftRotate(node);
}
五、AVL插入(增加平衡判断版)
AVLNode* insertAVL(AVLNode* node, int data) {if (node == NULL) {return createNode(data); // 假设createNode现在用AVLNode}if (data < node->data) {node->left = insertAVL(node->left, data);} else if (data > node->data) {node->right = insertAVL(node->right, data);}updateHeight(node);int bf = getBF(node);// LLif (bf > 1 && data < node->left->data) {return rightRotate(node);}// RRif (bf < -1 && data > node->right->data) {return leftRotate(node);}// LRif (bf > 1 && data > node->left->data) {node->left = leftRotate(node->left);return rightRotate(node);}// RLif (bf < -1 && data < node->right->data) {node->right = rightRotate(node->right);return leftRotate(node);}return node;
}六、AVL删除(增加平衡判断版)
// 先实现deleteNode类似朴素版,但用AVLNode,并返回节点
AVLNode* deleteAVL(AVLNode* root, int data) {// ... (类似deleteNode的核心逻辑,替换Node为AVLNode,并在替换后调用balance)// 假设核心删除后:updateHeight(root);int bf = getBF(root);// 类似insert的四种情况,但检查子树BF(因为删除可能影响多层)if (bf > 1 && getBF(root->left) >= 0) { // LLreturn rightRotate(root);}if (bf > 1 && getBF(root->left) < 0) { // LRroot->left = leftRotate(root->left);return rightRotate(root);}if (bf < -1 && getBF(root->right) <= 0) { // RRreturn leftRotate(root);}if (bf < -1 && getBF(root->right) > 0) { // RLroot->right = rightRotate(root->right);return leftRotate(root);}return root;
}总结
本篇文章的代码部分主要是以ai结合提示词辅助生成,所有的代码我全都review+编译过,实现过程十分简洁且清晰易懂,而且跟我上一篇写简单二叉树的博客的代码风格完美契合(我之前的文章代码都是手敲设计的,那时候的ai还远远不够先进),符合我的博客撰写通俗易懂的第一要义,也不经让我感叹现阶段ai功能的强大
特此鸣谢:molaGPT/Grok4 Fast
https://chatgpt.wljay.cn/v2/
这是ai回答生成的分享连接,点进去可以直接查看ai的回答,虽然有效期只有30天,不过在此留作纪念吧
Just a moment…
这是根据我之前的文章生成的提示词,虽然网站URL写错了,不过ai还是检索到了我的文章并生成了完美的回答