简单理解:ADC(模数转换)采集的滤波算法



ADC(模数转换)采集的滤波算法,核心是滤除采样噪声(如工频干扰、随机噪声)、提升数据稳定性,以下是常用算法+核心特点+适用场景,极简好懂:
1. 滑动平均滤波(Moving Average)
• 核心:取连续N个采样值的平均值作为有效输出(比如N=5,每次取最新5个值求平均)。
• 优点:简单易实现、计算量小,能滤除高频随机噪声;缺点:对突发信号(如尖峰干扰)抑制差,N越大响应越慢。
• 适用:采样频率高、噪声平稳的场景(如温度、湿度缓慢变化的模拟量采集)。
2. 加权滑动平均滤波
• 核心:在滑动平均基础上,给近期采样值赋更高权重(比如最新值权重0.5,前1个0.3,前2个0.2),再求和输出。
• 优点:兼顾平滑噪声和快速响应,比普通滑动平均更灵活;缺点:需手动调整权重,适配性依赖经验。
• 适用:既需要降噪,又不能容忍大幅延迟的场景(如轻度波动的电压采集)。
3. 中值滤波(Median Filter)
• 核心:取连续N个采样值排序后,取中间值作为输出(比如N=5,排序后第3个值)。
• 优点:对尖峰干扰(如静电脉冲、突发抖动)抑制极强,不影响信号趋势;缺点:对高频噪声滤除效果一般,N越大延迟越大。
• 适用:存在突发干扰的场景(如工业现场的电流采集、传感器接触抖动)。
4. 一阶滞后滤波(RC数字滤波)
• 核心:按公式计算:Y(n) = α×X(n) + (1-α)×Y(n-1)(X为当前采样值,Y为上一次输出值,α是0~1的权重系数)。
• 优点:兼顾平滑性和响应速度,α越大响应越快、平滑越弱,反之则相反;缺点:α需反复调试,对大幅突变信号跟踪差。
• 适用:高频噪声多、信号有小幅波动的场景(如压力、液位采样)。
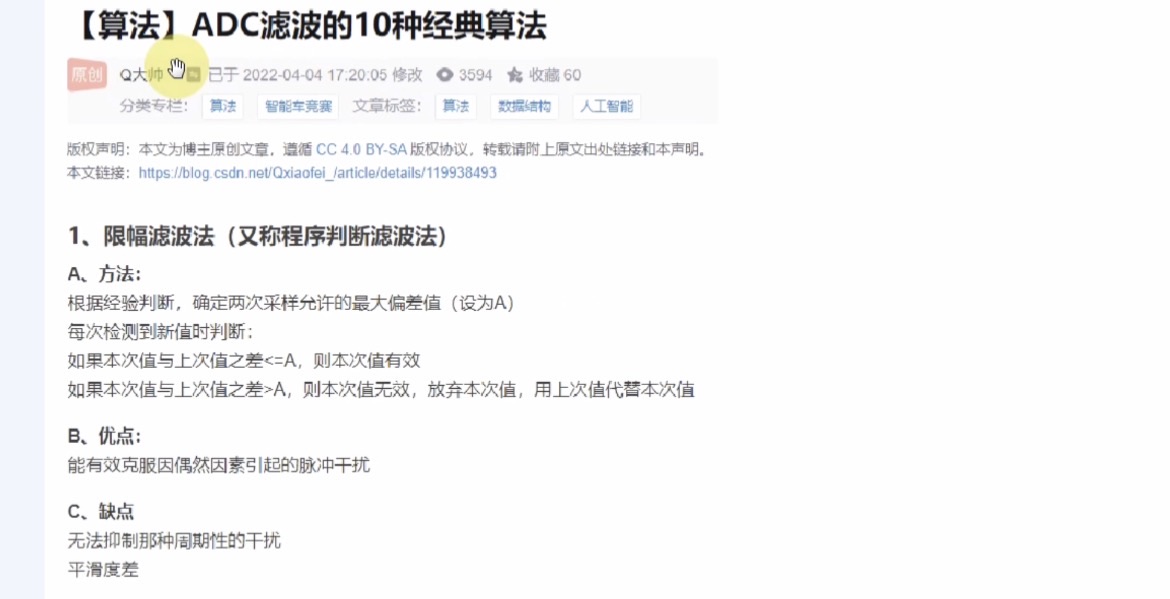
5. 限幅滤波(Clipping Filter)
• 核心:设定采样值的合理范围(上限Vmax、下限Vmin),超出范围则丢弃,沿用上次有效值。
• 优点:能快速剔除异常极值(如采样错误、大幅干扰),计算量极小;缺点:无法滤除范围内的噪声,需配合其他算法使用。
• 适用:易出现极端异常值的场景(如户外传感器、电磁干扰强的环境)。
6. 卡尔曼滤波(Kalman Filter)
• 核心:通过“预测-更新”迭代,结合信号模型和噪声统计特性,动态估算最优值(需建立系统方程)。
• 优点:降噪效果优、能处理非线性/动态信号,适合复杂噪声环境;缺点:数学模型复杂、计算量大,需调试参数(Q/R矩阵)。
• 适用:高精度、复杂噪声的场景(如惯性导航、电机转速采集、高精度电压监测)。
核心选型原则
• 简单场景(低精度、慢变化):滑动平均、限幅滤波(低成本、易实现);
• 突发干扰场景:中值滤波(优先扛尖峰);
• 兼顾响应与平滑:加权滑动平均、一阶滞后(手动调参数);
• 高精度/复杂噪声:卡尔曼滤波(需投入建模成本)。