CODESYS运动学笔记:Scara2模型机械臂可视化运动实例
一、前言
在之前的博文中我介绍了牛顿迭代法在二维机械臂逆运动学问题中的应用,本文我在CODESYS系统中,自主搭建一个简易的具有可视化的SCARA2模型(使用最基本的Visualization元件),让机器人动起来,同时验证ACS坐标(关节坐标)和WCS坐标(末端坐标)的关系。
有关SCARA2模型的介绍,可参考:https://blog.csdn.net/weixin_44166380/article/details/154018742?spm=1011.2415.3001.5331,本文不再过多文字赘述,直接上图演示;
CODESYS SCARA2机械臂可视化运动
二、硬件组态
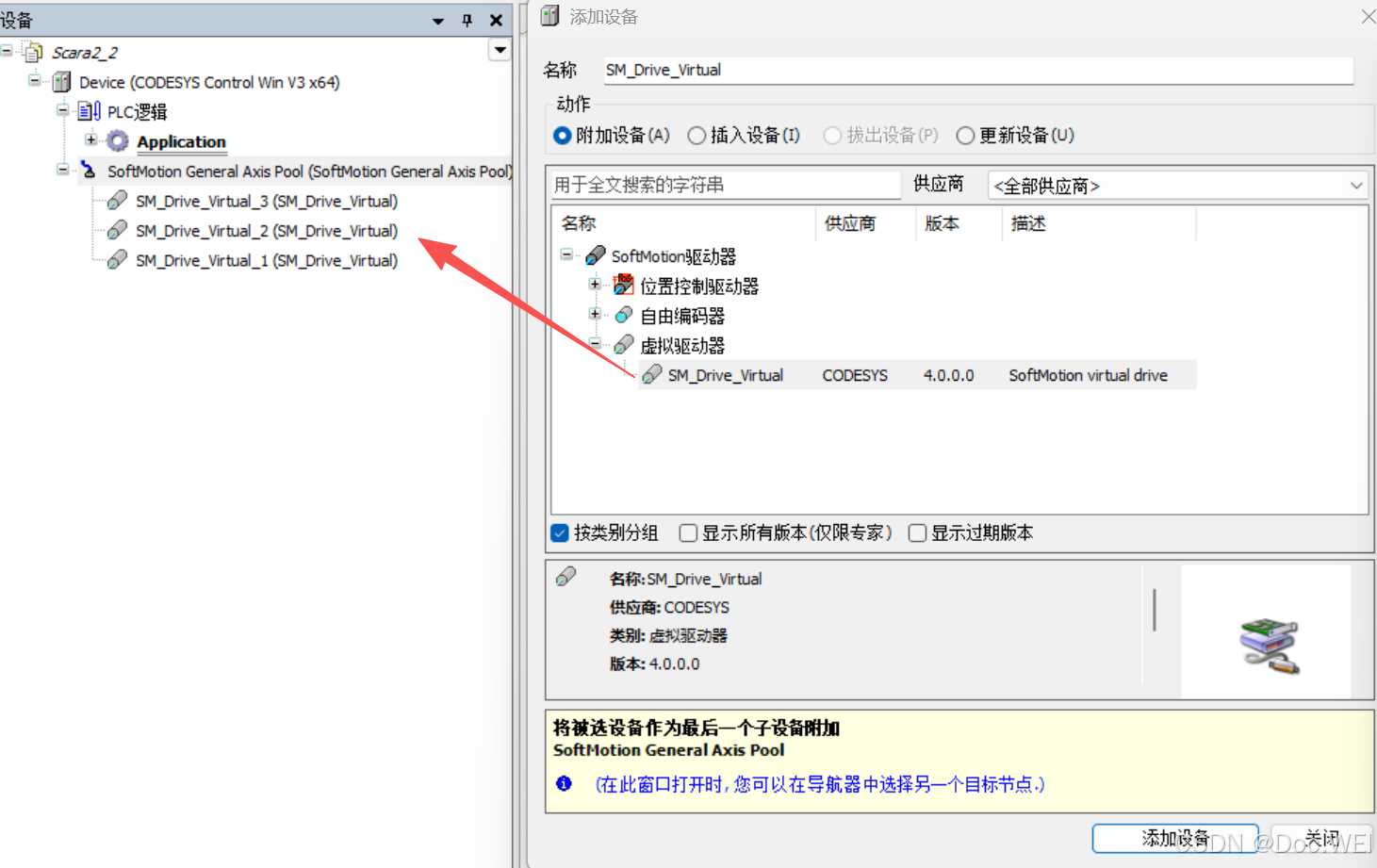
1.添加轴
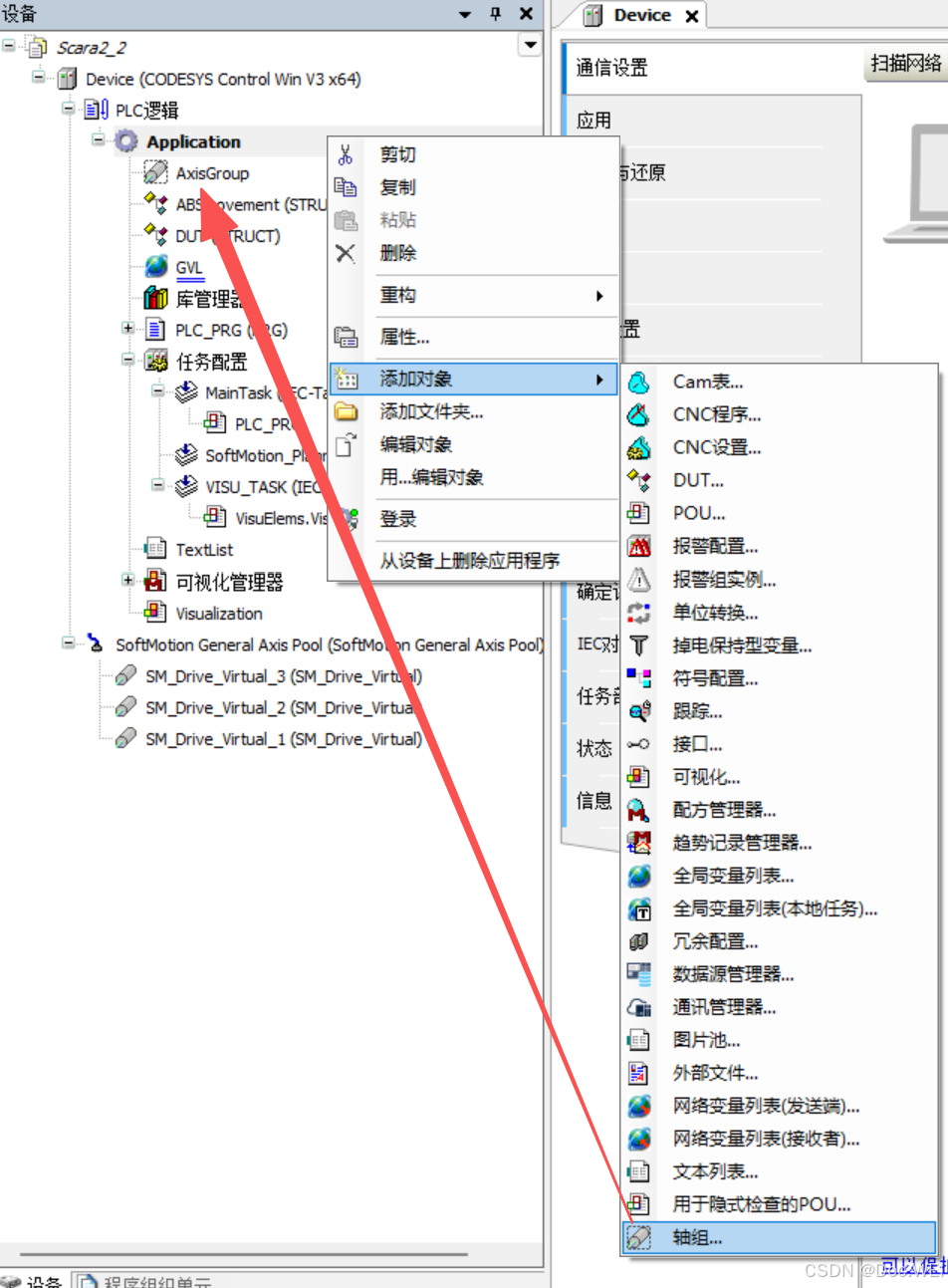
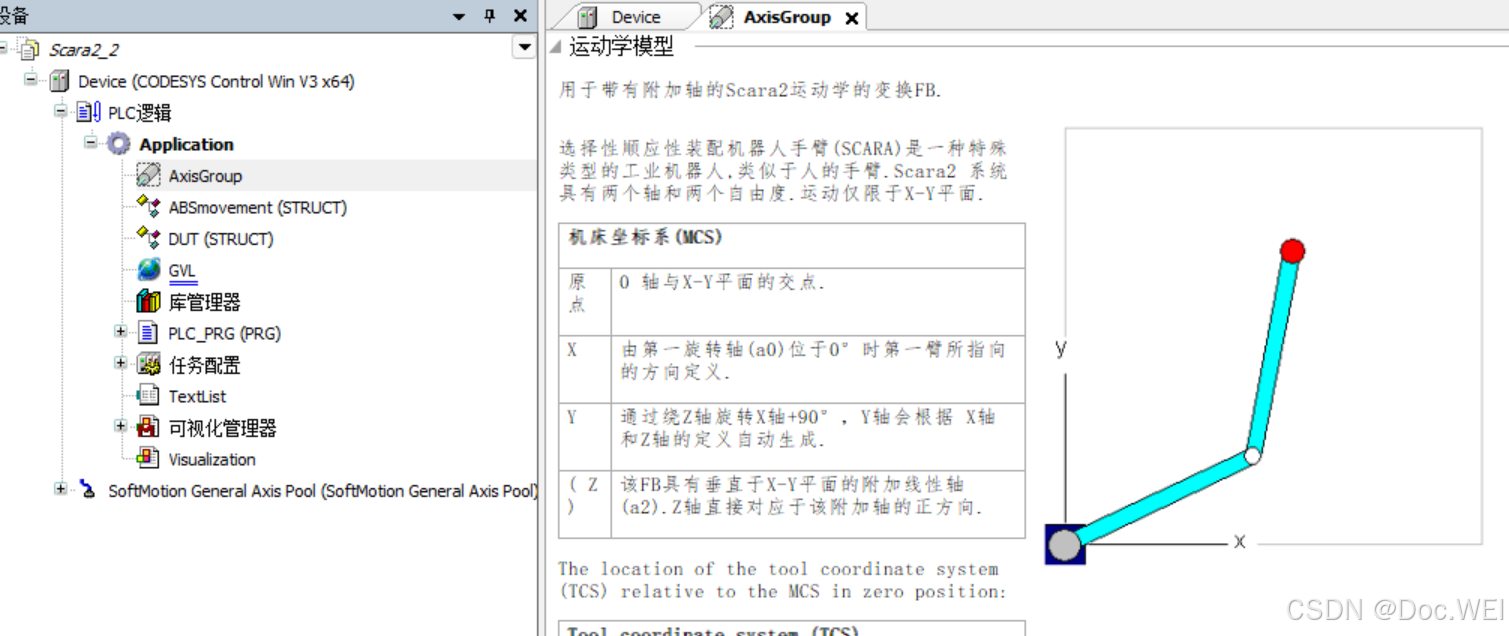
2.添加轴组
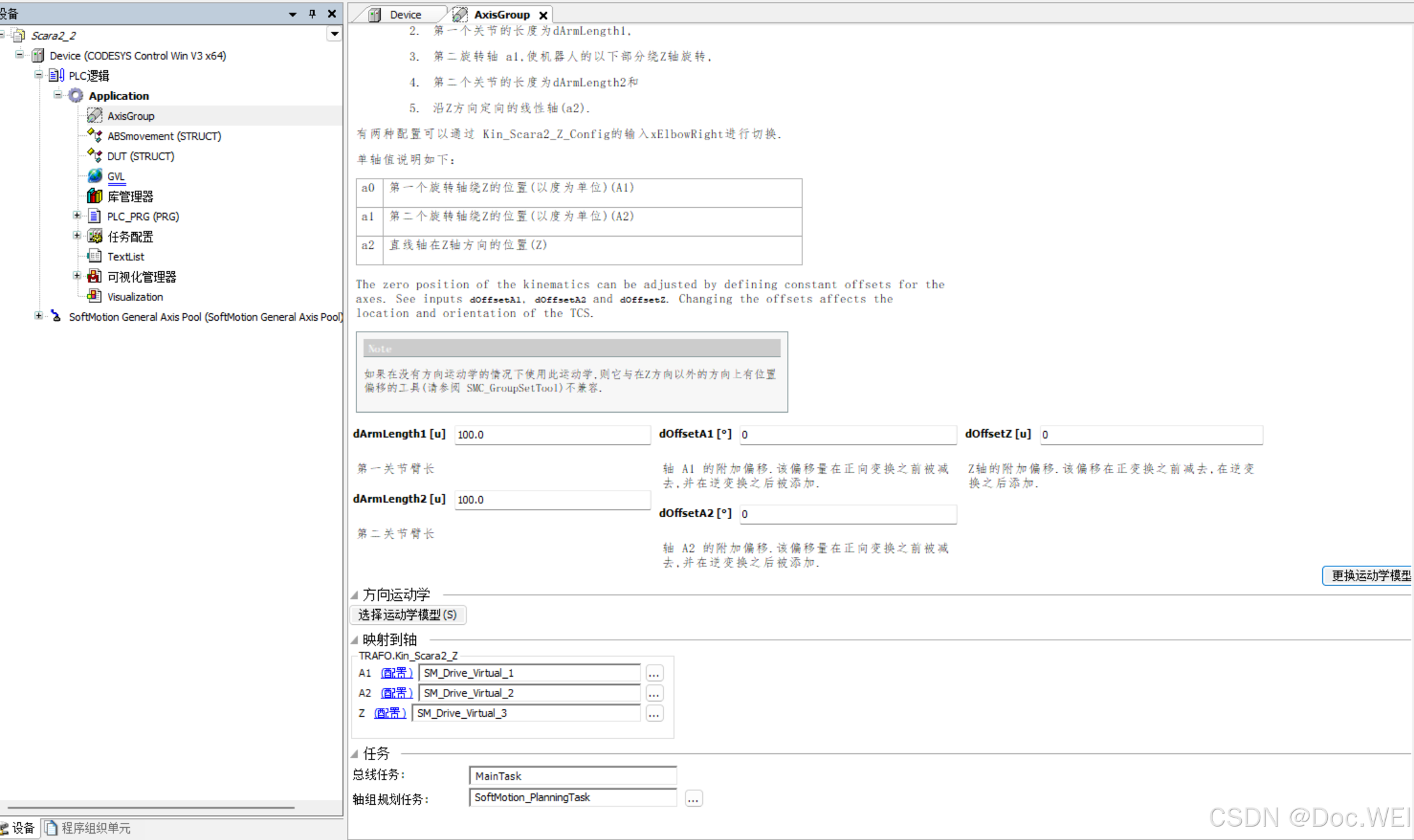
3.绑定轴
三、程序代码
1.功能块代码
轴组上电→轴组耦合→轴组复位/轴组点动/轴组点到点(PTP)运动→轴组去耦;
SMC_GroupPower_0(AxisGroup:=AxisGroup , Enable:= , bRegulatorOn:=SMC_GroupPower_0.Enable , bDriveStart:=SMC_GroupPower_0.Enable , Status=> , Busy=> , Error=> , ErrorID=> );MC_GroupEnable_0(AxisGroup:=AxisGroup , Execute:=SMC_GroupPower_0.Status