电子电力技术的控制电路学习分享1
【电力电子控制电路深度解析】从PWM到SG3525:掌握电源控制的核心技术
💡 作为一名电子工程师,你是否曾困惑:
PWM控制电路如何实现精准的电压调节?
集成控制器内部到底有哪些关键模块?
本文将为你彻底揭开电力电子控制电路的神秘面纱:
✅ PWM控制原理:单沿调制 vs 双沿调制深度对比
✅ 系统架构解析:从振荡器到驱动级的完整信号流
✅ SG3525实战详解:引脚功能、参数计算、应用技巧
✅ 闭环控制精髓:误差放大器的关键作用与设计要点
第9章 控制电路
为了保证电力电子变换器的电压或电流稳定,并具有良好的动态响应性能,需要通过控制电路来控制开关器件的开通和关断。
9.1 电力电子变换器系统构成
一般而言,电力电子变换器主要包括主功率电路、控制电路、驱动电路和保护电路等部分。主功率电路是功率处理的部分,包括开关器件、电感、电容等,如果需要电气隔离,还包括变压器、输出整流电路等。控制电路为控制信号的处理部分,用以实现电压或电流的调节功能。本章将以输出电压控制为例展开讨论。控制电路必须考虑到如下一些基本要求及功能:变换器作为一个闭环调节系统,与一般调节系统一样,要求控制电路应具有足够的环路增益,能在允许的输入电压、负载及温度变化范围内,输出电压稳定度达到规定的精度要求,即静态精度指标。同时,还必须满足动态响应性能要求,因此需加适当的校正网络或采用多反馈技术,用以满足获得稳定的输出电压及调节范围的要求。驱动电路起到功率放大作用,将控制电路输出的脉冲放大到足以驱动开关管。保护电路在变换器发生过流、过压和过温等故障时关闭开关管,对电路起到保护作用。
由前面章节分析可知,当输入电压或输出负载变化时,可通过调节开关管的占空比 DDD 来保证电力电子变换器的输出电压稳定。占空比是开关管的导通时间与开关周期之比,因此调节占空比的方式有两种:一种是固定开关周期(也即固定开关频率),通过调整一个开关周期内开关管的导通时间(脉冲宽度)来调节占空比,称之为脉冲宽度调制(PWM),简称脉宽调制;另一种是固定开关管导通时间或者关断时间,通过改变开关周期(也即开关频率)来调节占空比,称为脉冲频率调制(PFM),简称脉频调制。
根据实现方式不同,脉宽调制可分为单沿调制和双沿调制两种方式。图9.1给出这两种脉宽调制方式的产生电路与工作波形,它们都采用比较器电路实现脉宽调制。
单沿调制通常采用锯齿波作为载波信号 ucarrieru_{carrier}ucarrier,与调制波信号 umodu_{mod}umod 进行比较。当调制波信号高于锯齿波信号时,比较器输出 uPWMu_{PWM}uPWM 为高电平;反之,当调制波信号 umodu_{mod}umod 低于锯齿波信号 ucarrieru_{carrier}ucarrier 时,比较器输出 uPWMu_{PWM}uPWM 为低电平。在锯齿波载波信号固定的条件下,调制波信号电压越高,PWM高电平时间越长;反之,调制波信号越低,PWM高电平时间越短。因此,通过改变调制波信号电压大小即可实现输出占空比调节。
双沿调制时的载波信号 ucarrieru_{carrier}ucarrier 采用双边锯齿波(也即等腰三角波)形式,当调制波信号高于双边锯齿波信号时,比较器输出高电平,否则输出低电平。与单沿调制相比,采用双沿调制控制可以在一个开关周期内同时调节 PWM 信号的导通和关断时刻,调制控制方式更为灵活。

脉冲频率调制有如下三种实现方式:①恒定导通时间、变化关断时间,即恒定导通时间调制(Constant On-Time,COT);②恒定关断时间、变化导通时间,即恒定关断时间调制(Constant Off-Time,CFT);③导通时间和关断时间均变化,如滞环调制。
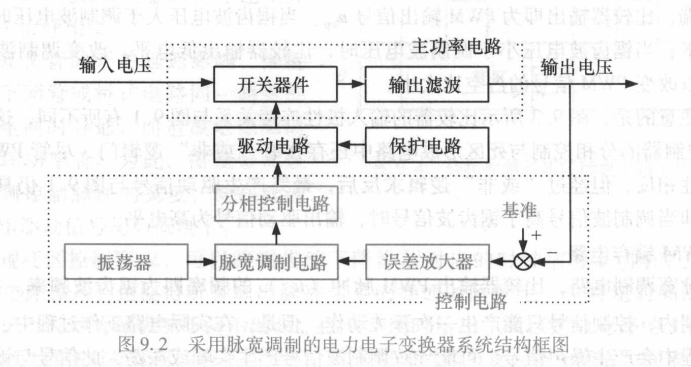
相比较而言,脉宽调制具有结构简单、易于实现等优点,而且其开关频率恒定、变换器中的电感、变压器和电容可以优化设计,已得到广泛应用,本章将主要讨论脉宽调制控制电路。图9.2给出了采用脉宽调制的电力电子变换器系统结构框图,图中上部为主功率电路、驱动电路与保护电路,图中下部虚线框内即为控制电路的基本组成单元,主要包括振荡器、脉宽调制器、分相控制电路和误差放大器。振荡器用来产生恒定频率的时钟脉冲信号和锯齿波信号,其频率决定了开关器件的工作频率。脉宽调制电路主要由电压比较器组成,将振荡器所产生的锯齿波信号与放大后的电压误差信号进行比较,并输出PWM控制信号,进而实现变换器输出电压控制。分相控制电路由门电路及触发器组成,将PWM信号分成两组交替出现的PWM信号,以满足推挽及桥式功率变换器的需要。误差放大器采用运算放大器加以适当的校正网络。
9.2 集成 PWM 控制器基本组成与工作原理
控制电路中各单元电路过去多采用分立元件来实现。随着微电子技术的发展,出现了各种集成脉宽调制控制器,它们包含了控制电路的全部功能,只需外加少量元件就能满足控制要求,大大减少了元器件数量,有效提高了可靠性。下面将以集成 PWM 控制器为例,讨论 PWM 控制器的基本组成、工作原理及应用。
9.2.1 PWM 控制器的基本组成与功能
常用的集成 PWM 控制器有 SG3525、TL494 和 UC3825、UC3845、UC3875 等。由于 PWM 控制器的型号很多,功能也不尽相同,在实际使用中应参考各厂家的产品说明,以便选择适合实际电路的集成 PWM 控制器。图 9.3 给出了常规集成 PWM 控制器组成电路结构,下面分别介绍各组成电路的工作原理及功能。

1. PWM 产生电路
PWM 信号产生电路主要包括振荡器和比较器。振荡器用以产生一个周期为 TTT 的锯齿波信号 urampu_{ramp}uramp,该锯齿波接至比较器 COMP 的同相输入端,调制波信号 umodu_{mod}umod 接至比较器 COMP 的反相输入端,比较器输出即为 PWM 输出信号 uPWMu_{PWM}uPWM。当锯齿波电压大于调制波电压时,比较器输出高电平;当锯齿波电压小于调制波电压时,比较器输出低电平。改变调制波的电压大小,即可改变 PWM 信号的占空比大小。
需要注意的是,图 9.3 所示比较器的输入极性连接关系与图 9.1 有所不同,这主要是因为 PWM 控制器的分相控制与死区形成电路中还存在"或非"逻辑门,尽管 PWM 比较器的输入极性相反,但经过"或非"逻辑求反后,最终产生驱动信号与图 9.1 仍具有相同控制逻辑,即当调制波信号高于锯齿波信号时,输出驱动信号为高电平。
2. PWM 锁存电路
对于脉宽调制电路,比较器输出 PWM 脉冲(uPWMu_{PWM}uPWM)的频率即为锯齿波频率。换而言之,在一个周期内,控制信号只能产生一次开关动作。但是,在实际电路工作过程中,开关器件在开关过程中会产生噪声信号,可能导致调制波信号产生尖峰或振荡,此信号与锯齿波信号比较时就会出现多个交点,造成锯齿波一个周期中比较器输出多个方波,破坏了正常的脉宽调制作用。
为了避免这一现象,在比较器输出 PWM 脉冲之后增加了一个 RS 锁存器。振荡器输出一个对应于锯齿波下降沿的时钟脉冲(uclocku_{clock}uclock),该时钟脉冲与锁存器的复位端相连接;比较器输出的 PWM 脉冲(uPWMu_{PWM}uPWM)与锁存器的置位端相连接。根据 RS 锁存器工作原理,在每个时钟脉冲的上跳沿(即锯齿波的下降沿),锁存器输出置"0",在第一个 PWM 脉冲的上跳沿,锁存器输出置"1"。由于锁存器只有在复位端信号置"1"后,其置位端的第一个置"1"脉冲才起作用,以后的置位端状态变化不再影响锁存器的输出,故在一个锯齿波周期内,即使比较器输出信号有多个脉冲,锁存器仅输出一个方波脉冲信号。
3. 分相控制与死区形成电路
对于单管变换器,经过比较器和锁存器后的输出 PWM 信号就可作为控制开关管的通断信号,但是对于推挽或桥式等变换器,还应将 PWM 信号分为两组信号,两组控制信号交错驱动功率电路中两组功率器件。
在图 9.3 所示的 PWM 控制电路中,分相电路由触发器及两个"或非"门组成。锯齿波下降沿所对应的时钟信号 uclocku_{clock}uclock 作为触发器的触发信号,每次锯齿波下降对应于触发器翻转一次,将触发器的两组互补输出信号(“Q"与”Q‾\overline{Q}Q“)分别与锁存器输出脉冲信号相"或非”,即可得到两组 PWM 控制信号(“A"与"B”),实现分相控制要求。图 9.4 给出分相控制与死区形成电路的工作波形。由于分相控制电路中增加了"或非"逻辑门,最终输出 PWM 控制信号与 PWM 比较器输出信号逻辑相反,为实现与图 9.1 所示的相同 PWM 控制逻辑,故图 9.3 中 PWM 比较器的输入信号连接关系与图 9.1 恰好相反。
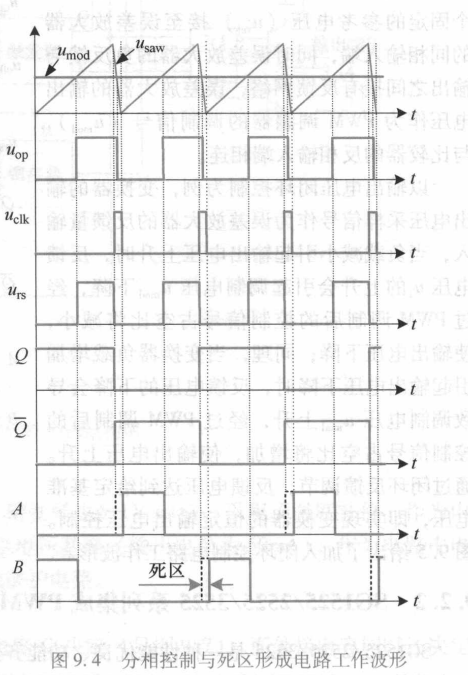
由于开关管的开关延迟影响,推挽电路的上下两管或桥式电路同一桥臂的两管会产生同时导通,而造成电源瞬时短路、损坏功率管。为此,需要更短的时间以限制控制脉冲的宽度,即在此区间内,两组驱动信号均为低电平。
为实现死区控制要求,可以将锯齿波下降沿所对应的时钟信号 uclocku_{clock}uclock 同时引入到"或非"逻辑电路输入,这使得所有输出脉冲信号的导通时间产生一个特定时间滞后,对应形成的死区时间即为锯齿波下降沿时长,图 9.4 同时给出了死区形成电路的工作波形。不同功率电路及器件对死区时间有不同要求,这可以通过调节锯齿波下降沿时间来调整死区时间。
4. 误差放大电路
根据是否具有反馈控制结构,电力电子变换器可以分成开环控制和闭环控制两种控制类型。对于开环控制而言,当调制信号电压被设置成一个特定数值并维持不变时,电力电子变换器可以实现在特定工作条件下稳定电压输出要求。但是,当变换器的工作条件(如输入电压或输出负载)发生变化时,由于占空比维持不变,变换器输出电压也将发生变化,无法实现稳定电压输出要求。为了实现电力电子变换器输出电压和电流的动态调节,需要加入反馈控制系统,即采用闭环控制结构。通过将系统输出量的测量值与所期望的给定值相比较,由此产生一个误差信号,利用此误差信号进行调节控制,使输出值尽量接近于期望值。
为实现闭环控制要求,需要在 PWM 调制电路中增加误差放大器,在图 9.3 所示的 PWM 控制电路中,系统输出反馈量 ufu_fuf 接至误差放大器(OP)的反相输入端,一个固定的参考电压 urefu_{ref}uref 接至误差放大器的同相输入端,同时误差放大器的负反馈与输出之间接有反馈网络,误差放大器的输出电压作为 PWM 调制器的调制信号 umodu_{mod}umod,与比较器的反相输入端相连。
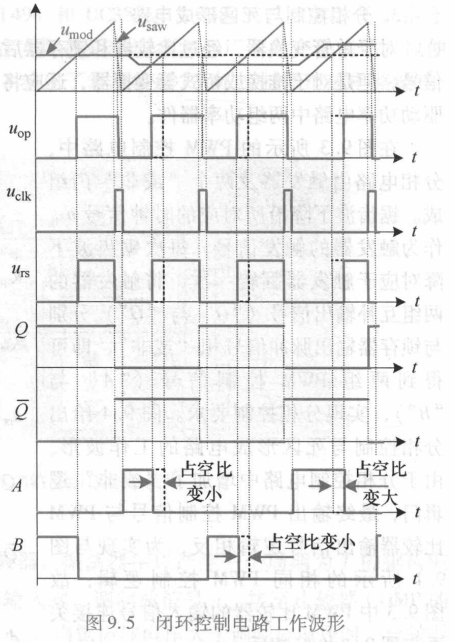
以输出电压闭环控制为例,变换器的输出电压采样信号作为误差放大器的反馈输入,当负载减少引起输出电压上升时,反馈电压 ufu_fuf 的上升会引起调制电压 umodu_{mod}umod 下降,经过 PWM 调制后的控制信号占空比将减小,使输出电压下降;同时,当变换器负载增加引起输出电压下降时,反馈电压的下降会导致调制电压 umodu_{mod}umod 上升,经过 PWM 调制后的控制信号占空比将增加,使输出电压上升。通过闭环反馈调节,反馈电压达到给定基准电压,即实现变换器的恒定输出电压控制。图 9.5 给出了加入闭环控制电路工作波形。
9.2.2 SG1525/2525/3525 系列集成 PWM 控制器
SG1525/2525/3525 是一种性能优良、功能齐全及通用性强的集成 PWM 控制器,它是意法半导体(ST Microelectronics)公司生产的电压模式控制的集成 PWM 控制器,我国的集成电路制造厂家已生产出该系列的国产 PWM 控制器。
SG1525/2525/3525 是开关电源脉宽调制型控制器,可应用于直流变换器、开关稳压器、电压倍增器、极性转换器等。SG1525/2525/3525 包含有完整的脉冲宽度调制控制电路,可以实现振荡器外同步,死区调节,PWM 锁存器与输出级的最佳设计,适用于驱动 NPN 型开关管或 N 沟道 MOSFET,能够实现单端或推挽两种驱动模式。SG1525/2525/3525 系列不同产品内部结构和功能完全一样,差别仅在允许的工作温度范围。该系列集成电路的四位数字编号的各位表示了温度范围,"1"为宽温度范围,适用于航空航天和军事装备,工作环境温度范围是-55125℃;"2"为中等温度范围,适用于环境温度范围较宽的工业设备、汽车电子设备等,工作环境温度范围是-2585℃;"3"为窄温度范围,适用于一般工业设备和家电,工作环境温度是0~70℃。
产品内部结构和功能完全一样,差别仅在允许的工作温度范围。该系列集成电路的四位数字编号的各位表示了温度范围,"1"为宽温度范围,适用于航空航天和军事装备,工作环境温度范围是-55125℃;"2"为中等温度范围,适用于环境温度范围较宽的工业设备、汽车电子设备等,工作环境温度范围是-2585℃;"3"为窄温度范围,适用于一般工业设备和家电,工作环境温度是0~70℃。
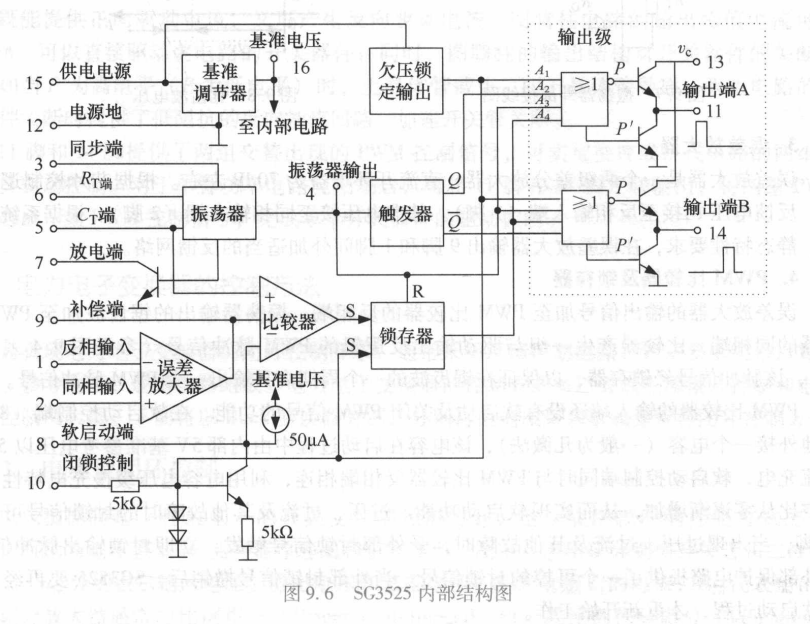
下面以SG3525为例介绍该系列集成电路内部结构与工作原理,SG3525的内部结构如图9.6所示,电路由如下几部分组成:基准电压、振荡器、误差放大器、比较器、锁存器、分相器、欠压锁定、输出级、软启动及关断电路。分别叙述如下:
1. 基准电压源
基准电压源是一个典型的三端稳压器,精度可达5.1V±1%5.1V \pm 1\%5.1V±1%,采用了温度补偿。作为内部电路的供电电源,可以通过16脚对外提供电压基准(输出电流为50mA),作为电路中电压和电流的给定基准。基准电压源设有过流保护电路。
2. 振荡器
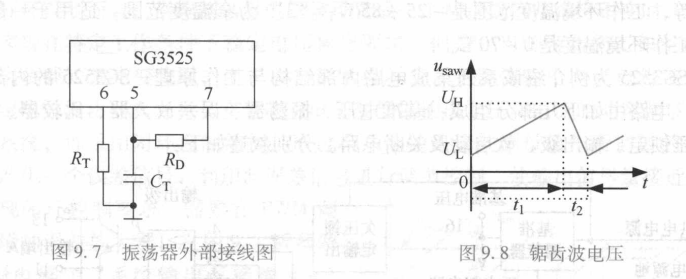
振荡器的振荡频率由外接的电阻RTR_TRT和电容CTC_TCT决定(见图9.7),而外接电容同时还决定了死区时间的长短(见图9.8),开关频率同电阻RTR_TRT和电容CTC_TCT的关系如下所示:
fs=1t1+t2≈1CT(0.7RT+3RD)(9.1)f_s = \frac{1}{t_1 + t_2} \approx \frac{1}{C_T(0.7R_T + 3R_D)} \tag{9.1}fs=t1+t21≈CT(0.7RT+3RD)1(9.1)
式中,fsf_sfs为时钟频率;t1t_1t1和t2t_2t2分别为锯齿波的上升和下降时间;RTR_TRT为6脚外接电阻;CTC_TCT为5脚外接电容;RDR_DRD为5脚,7脚之间跨接的电阻。
振荡器在4脚输出一对应锯齿波下降边的时钟信号,时钟信号宽等于t2t_2t2,故调节RDR_DRD就调节了时钟信号宽度。该控制器就是通过调节 RDR_DRD 来调节死区大小的,RDR_DRD 越大,死区越宽。
振荡器还没有外同步输入端(3脚),在3脚加直流或高于振荡器频率的脉冲信号,可实现对振荡器的外同步。
3. 误差放大器
误差放大器是一个两级差分放大器,直流开环增益为70dB左右。根据芯片控制逻辑要求,反馈电压 UfU_fUf 接至反相输入端(1脚),基准电压接至同相输入端(2脚)。根据系统的动态、静态特性要求,在误差放大器输出9脚和1脚间外加适当的反馈网络。
4. PWM比较器及锁存器
误差放大器的输出信号与PWM比较器的反相端、振荡器输出的锯齿波加至PWM比较器的同相端,比较器产生一组与驱动输出反逻辑的PWM脉冲信号(参见图9.4工作波形),该脉冲信号经锁存器,以保证在锯齿波的一个周期内只输出一个PWM脉冲信号。
PWM比较器的输入端还设有软启动及关闭PWM信号的功能。在软启动控制端(8脚)至地外接一个电容(一般为几微法),该电容在启动过程中由内部5V基准参考电压以50μA恒流充电,软启动控制端同时与PWM比较器反相端相连,利用电容电压缓慢充电特性限制占空比从零逐渐增加,从而实现软启动功能。过压、过流及其他故障时的封锁信号可加至10脚,当出现过压、过流及其他故障时,受外部封锁信号触发,立即封锁输出脉冲信号,给外部保护电路提供了一个可控的封锁信号。当外部封锁信号撤销后,SG3525要再经过一次软启动过程,才重新开始工作。
5. 分相器
分相器由一个T触发器组成。其触发信号为振荡器输出的时钟信号,对应每个锯齿波下降沿触发器被触发翻转一次。分相器输出频率为振荡频率一半的方波信号,送至输出级的两组门电路输入端,以实现PWM脉冲的分相。
6. 欠压锁定
电路工作时,如果控制器的电源电压 UccU_{cc}Ucc 降到正常工作的最低电压(8V)以下,电路各部分工作就会异常,输出级输出异常的PWM控制信号,将损坏电路的功率管,故此时应能自动切断控制信号。
电路初上电时,当电源电压低于启动电压(典型值约为8V)时,欠压保护电路封锁PWM信号的输出,输出端A和B为低电平。只有当电源电压大于启动电压后,经过一次软启动过程,SG3525的内部电路才开始工作,输出端才有PWM信号输出。在工作过程中,如果电源电压跌落至保护阈值(典型值为7V)以下时,欠压锁定输出一高电平信号加至输出级"或非"门输入端,以封锁 PWM 脉冲信号。只有当电源电压再次高于启动电压后,再经过一次软启动过程,SG3525 的内部电路才重新开始工作,恢复 PWM 信号输出。
7. 输出级
输出级采用了图腾柱结构,这是该系列控制器的最大优点之一。SG3525 有两组相同结构的输出级。SG3525 的输出级采用"或非"门,"或非"门有四个输入端,分别加入 PWM 脉冲信号、分相器输出的 Q 信号(或 Q‾\overline{Q}Q 信号),锯齿波下降沿对应的时钟信号,以及欠压锁定信号,设其输出信号为 P 和 P’,则按"或非"逻辑,P=A1+A2+A3+A4‾P = \overline{A1 + A2 + A3 + A4}P=A1+A2+A3+A4 和 P′=A1+A2+A3+A4‾P' = \overline{A1 + A2 + A3 + A4}P′=A1+A2+A3+A4,P 和 P’两信号分别驱动输出级的上下两个晶体管。两晶体管组成图腾柱结构,使输出既能提供正向驱动电流,又可产生反向驱动电流。图腾柱电路的输出峰值电流可达 500mA,可以直接驱动主电路的开关器件;同时,图腾柱的输出结构对开关器件的关断有利,如当 P’为高电平(P 为低电平)时,上晶体管截止,而下晶体管导通,为主电路的开关器件关闭时提供了低阻抗的反向抽流回路,加速开关管关断。
11 脚和 14 脚提供了两组交替出现的 PWM 控制信号,可实现推挽或桥式电路的两组开关器件驱动控制。对于单管功率电路应用场合,可将 11 脚和 14 脚并联输出,将两组 PWM 信号合成一组 PWM 控制信号,完成单个开关器件的驱动控制。
📊 核心要点总结
1️⃣ PWM控制技术深度解析
🔹 两种调制方式
单沿调制:简单可靠,适合基础应用
双沿调制:控制灵活,动态性能更优
🔹 三种频率调制
COT(恒定导通时间):响应快,适合动态负载
CFT(恒定关断时间):稳定性好
滞环调制:自适应控制,复杂度高
2️⃣ 系统架构与信号流
🔹 核心组成模块
振荡器 → 比较器 → 锁存器 → 分相电路 → 驱动级
↑
误差放大器
🔹 关键保护机制
PWM锁存:抗噪声干扰,确保每个周期单一脉冲
死区控制:防止桥臂直通,保障系统安全
欠压锁定:电源异常时自动关断输出
3️⃣ SG3525集成控制器实战指南
设计要点:
RTR_TRT 决定充电电流,影响频率
CTC_TCT 决定锯齿波斜率
RDR_DRD 调节死区时间,RDR_DRD↑ → 死区↑
🔹 关键功能特性
基准电压:5.1V ±1%,温度补偿
误差放大器:70dB开环增益,外接补偿网络
输出级:图腾柱结构,500mA驱动能力
软启动:50μA恒流充电,平滑启动
4️⃣ 闭环控制核心技术
🔹 控制原理
反馈采样:输出电压→误差放大器反相端
基准比较:固定参考电压→同相端
动态调节:uf↑→umod↓→D↓→Uo↓u_f↑ → u_{mod}↓ → D↓ → U_o↓uf↑→umod↓→D↓→Uo↓
🔹 设计关键
稳定性:通过补偿网络保证相位裕度
精度:高增益误差放大器减小静差
响应速度:优化带宽提升动态性能
5️⃣ 工程实践要点
🔹 选型指南
SG1525:军工级(-55~125℃)
SG2525:工业级(-25~85℃)
SG3525:商业级(0~70℃)
🔹 布局布线建议
基准电源单独退耦
振荡元件靠近芯片放置
驱动回路面积最小化
反馈网络远离噪声源
🔹 调试技巧
先开环验证PWM生成
逐步增加闭环增益
死区时间从大到小优化
满载测试热稳定性
💎 总结
控制电路是电力电子变换器的"大脑",掌握其工作原理对于设计高性能电源系统至关重要。
技术演进:
从分立元件 → 集成控制器,可靠性大幅提升
SG3525为代表的第二代PWM控制器,功能完善,应用广泛
设计精髓:
🎯 理解每个模块的功能与相互关系
🎯 掌握关键参数的计算与优化
🎯 平衡性能、成本与可靠性
未来趋势:
数字控制提供更高灵活性
自适应算法改善动态响应
集成化进一步提高功率密度
掌握这些控制电路的核心知识,你将能够设计出稳定可靠、性能优异的电源产品,在技术竞争中占据优势地位!