计算机图形学:【Games101】学习笔记03——光栅化(三角形的离散化、深度测试与抗锯齿)
计算机图形学:【Games101】学习笔记03——光栅化(三角形的离散化、深度测试与抗锯齿)
- 前言
- 一、光栅化(三角形的离散化)
- 1.1 透视投影(Perspective Projection)
- 1.2 视口变换:标准立方体到屏幕(Canonical Cube to Screen)
- 1.3 光栅化基础:从三角形到像素(Triangles、Samping)
- 1.3.1 三角形:基础图元(Triangles - Fundamental Shape Primitives)
- 1.3.2 光栅化的核心逻辑:2D 采样
- 1.3.3 统一所有 2D 变换
- 1.3.4 光栅化的问题:走样(Aliasing)与锯齿(Jaggies)
- 1.3.5 补充:常见的光栅显示器
- 二、光栅化(深度测试与抗锯齿)
- 2.1 走样(Aliasing)
- 2.1.1 走样的常见现象
- 2.1.2 走样的本质:信号采样理论
- 2.2 反走样(Anti-Aliasing)
- 2.2.1 反走样的理论逻辑:预滤波(Pre-Filtering)
- 2.2.2 图形学中的预滤波:像素区域平均
- 2.2.3 实用反走样方法:超采样(SSAA)与多重采样(MSAA)
- 2.2.4 其他反走样技术简介
- 三、疑难点整理总结
- 写在最后
前言
- 🎮 GAMES101 是国内相当有名的图形学公开课。项目相关资源在:https://sites.cs.ucsb.edu/~lingqi/teaching/games101.html。
- 本 📒笔记为 🖊️笔者在自学过程中整理的 🇨🇳中文版笔记,供各位 📖读者阅读 😼~
- 从这一讲开始,我们正式进入计算机图形学的核心模块 ——光栅化(Rasterization)。光栅化是 “将 2D 图形图元(如三角形)转换为屏幕像素” 的关键技术,也是游戏等实时渲染场景的核心。本讲先补全 “视图变换管线的最后一步(视口变换)”,再聚焦三角形光栅化的基本原理、采样逻辑与优化方法,内容相对直观,下面逐模块梳理。
一、光栅化(三角形的离散化)
1.1 透视投影(Perspective Projection)
上一讲已推导透视投影矩阵,但未明确 “如何通过视角(fovY)和宽高比(aspect)定义视锥体”,同时还需补充 “标准立方体到屏幕” 的视口变换,这两部分是光栅化前的最后准备。
实际应用中,我们不会直接指定视锥体的左(l)、右(r)、下(b)、上(t)边界,而是通过更直观的垂直视场角(fovY) 和屏幕宽高比(aspect) 推导,前提是视锥体 “左右对称(l=-r)” 和 “上下对称(b=-t)”。

1. 关键参数定义
- 垂直视场角(fovY):相机沿 y 轴方向的视野范围,即近平面上下边界与相机连线的夹角;
- 宽高比(aspect):屏幕宽度与高度的比值(aspect = width /height);
- 近平面距离(|n|):相机到近平面的距离(因相机看向 - Z 轴,n 为负值,|n | 为实际距离)。
2. 推导过程(How to convert from fovY and aspect to l, r, b, t?)
- 1️⃣ 求上边界 t:从相机原点看向近平面,y 轴方向的三角形为直角三角形(对边为 t,邻边为 | n|,锐角为 fovY/2),根据正切函数:tan(fovY2)=t∣n∣⟹t=∣n∣⋅tan(fovY2)\tan\left(\frac{\text{fovY}}{2}\right) = \frac{t}{|n|} \implies t = |n| \cdot \tan\left(\frac{\text{fovY}}{2}\right)tan(2fovY)=∣n∣t⟹t=∣n∣⋅tan(2fovY)。 因上下对称,下边界 b = -t;
- 2️⃣ 求右边界 r:根据宽高比定义(aspect = 宽度 / 高度),而宽度 = r - l = 2r(l=-r),高度 = t - b = 2t(b=-t),因此:aspect=2r2t=rt⟹r=t⋅aspect\text{aspect} = \frac{2r}{2t} = \frac{r}{t} \implies r = t \cdot \text{aspect}aspect=2t2r=tr⟹r=t⋅aspect。因左右对称,左边界 l = -r。

1.2 视口变换:标准立方体到屏幕(Canonical Cube to Screen)
视口变换(Viewport Transformation)是 “视图 - 投影管线” 的最后一步,将标准立方体 [−1,1]3[-1,1]^3[−1,1]3 的 xy 平面(2D 投影结果)映射到屏幕像素坐标系,实现 “从数学坐标到屏幕像素” 的转换。
1. 屏幕坐标系的定义
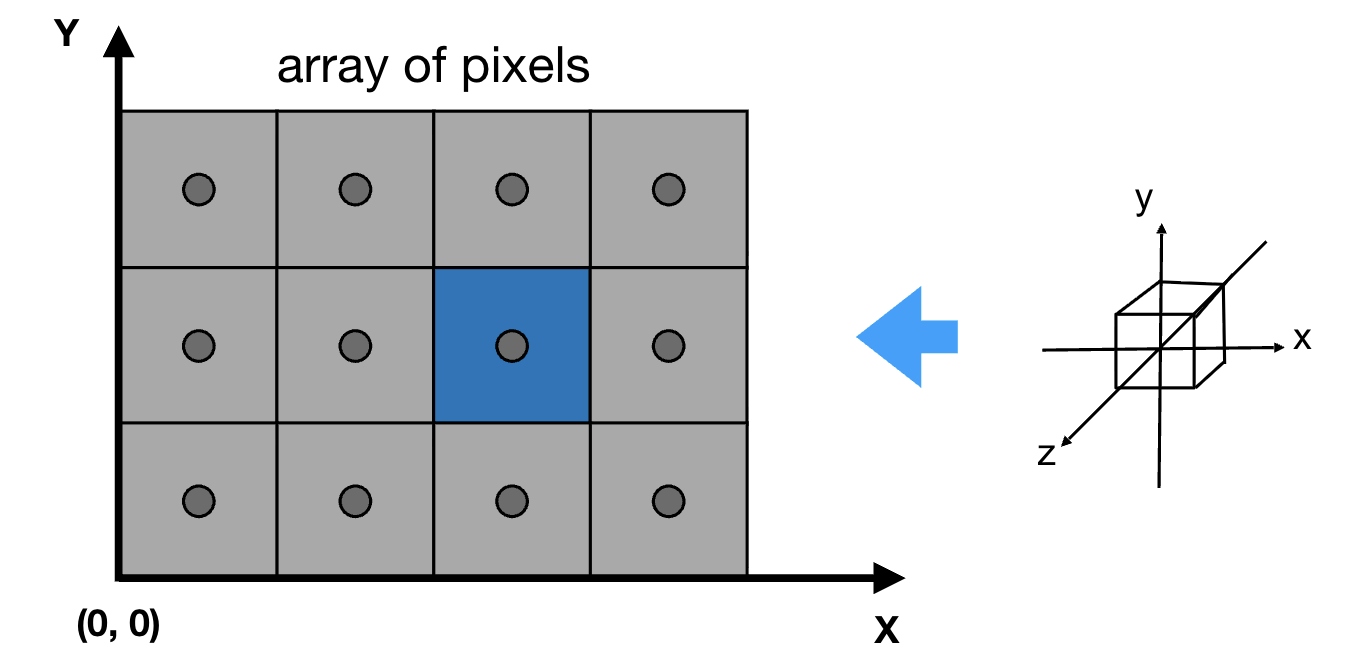
- 屏幕:由像素组成的 2D 数组,分辨率为 width × height(如 1920×1080,width=1920 为像素列数,height=1080 为像素行数);
- 像素坐标:像素索引为整数,范围从 (0, 0)(屏幕左上角)到 (width-1, height-1)(屏幕右下角);
- 每个像素的 “采样中心” 坐标为 (x+0.5, y+0.5)(如像素 (0,0) 的中心在 (0.5, 0.5),避免采样点落在像素边缘);
- 屏幕的整体范围为 (0, 0) 到 (width, height)(覆盖所有像素的中心)。
2. 视口变换的目标
- 将标准立方体 xy 平面的 [−1,1]2[-1,1]^2[−1,1]2 范围,映射到屏幕的 [0,width]×[0,height][0, width] × [0, height][0,width]×[0,height] 范围,z 坐标暂时无关(后续用于深度测试)。
3. 视口变换矩阵MviewportM_{viewport}Mviewport
- 变换分为 “缩放” 和 “平移” 两步,最终 4×4 齐次矩阵为:Mviewport=[width200width20height20height200100001]M_{viewport} = \begin{bmatrix} \frac{\text{width}}{2} & 0 & 0 & \frac{\text{width}}{2} \\ 0 & \frac{\text{height}}{2} & 0 & \frac{\text{height}}{2} \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}Mviewport=2width00002height0000102width2height01
- 缩放逻辑:将 [-1,1] 的长度(2 个单位)缩放到屏幕的 width/height 长度,缩放因子为 width/2(x 轴)和 height/2(y 轴);
- 平移逻辑:将缩放后的范围(x 从 - width/2 到 width/2,y 从 - height/2 到 height/2)平移到屏幕的 [0, width] × [0, height] ,平移量为 width/2(x 轴)和 height/2(y 轴);
- 示例:标准坐标 (-1, -1)(左下)经变换后为 (0, 0)(屏幕左下),标准坐标 (1, 1)(右上)经变换后为 (width, height)(屏幕右上),符合预期。
4. 完整的视图 - 投影管线- 至此,3D 点到屏幕像素的完整变换流程为:
- 3D点→建模变换Mmodel世界坐标→视图变换Mview相机坐标→投影变换Mproj标准立方体→视口变换Mviewport屏幕坐标\text{3D点} \xrightarrow{\text{建模变换}M_{model}} \text{世界坐标} \xrightarrow{\text{视图变换}M_{view}} \text{相机坐标} \xrightarrow{\text{投影变换}M_{proj}} \text{标准立方体} \xrightarrow{\text{视口变换}M_{viewport}} \text{屏幕坐标}3D点建模变换Mmodel世界坐标视图变换Mview相机坐标投影变换Mproj标准立方体视口变换Mviewport屏幕坐标。
- 最终得到三角形顶点的屏幕坐标,为后续光栅化做好准备。
1.3 光栅化基础:从三角形到像素(Triangles、Samping)
光栅化的核心是 “将 2D 图形图元(如三角形)转换为屏幕上的像素集合”,而三角形是图形学中最常用的图元,原因在于其独特的几何性质。
1.3.1 三角形:基础图元(Triangles - Fundamental Shape Primitives)
三角形是光栅化的 “最优图元”,主要有 4 个关键原因:
- 最基本的多边形:任何复杂多边形(如四边形、五边形)都可拆分为多个三角形;
- 保证平面性:三个点必然共面,不会出现 “非平面多边形”(如四边形可能因顶点不在同一平面导致渲染错误);
- 内部定义明确:三角形的内部和外部有清晰的数学判断方法(如叉积);
- 便于插值:可通过重心坐标(Barycentric Coordinates)在三角形内部平滑插值颜色、纹理坐标、法向量等属性。
1.3.2 光栅化的核心逻辑:2D 采样
光栅化本质是 “对三角形的 2D 指示函数进行采样”—— 判断每个像素的中心是否在三角形内部,若在则为该像素分配颜色,否则不分配。
2D 指示函数的定义
- 定义二元函数 inside(tri,x,y)\text{inside}(tri, x, y)inside(tri,x,y),表示点 (x,y) 是否在三角形 tri 内部:inside(tri,x,y)={1若(x,y)在三角形内部或边上0否则\text{inside}(tri, x, y) = \begin{cases} 1 & \text{若}(x,y)\text{在三角形内部或边上} \\ 0 & \text{否则} \end{cases}inside(tri,x,y)={10若(x,y)在三角形内部或边上否则
- 光栅化就是对这个函数在 “所有像素中心” 进行采样,采样结果为 1 的像素即为三角形覆盖的像素。
采样流程(伪代码):
// 遍历屏幕所有像素
for (int x = 0; x < width; ++x) {for (int y = 0; y < height; ++y) {// 计算当前像素的中心坐标float sampleX = x + 0.5f;float sampleY = y + 0.5f;// 判断中心是否在三角形内,是则标记像素if (inside(triangle, sampleX, sampleY)) {image[x][y] = triangleColor; // 为像素分配三角形颜色}}
}

如何判断点是否在三角形内部?—— 叉积法:光栅化的关键步骤,利用 “叉积判断向量方向” 的性质,通过三次叉积即可确定点与三角形的位置关系。
设三角形的三个顶点为 P0,P1,P2P_0, P_1, P_2P0,P1,P2,待判断的点为Q:
1. 计算三个边对应的向量叉积:
- c0⃗=P0P1⃗×P0Q⃗\vec{c_0} = \vec{P_0P_1} \times \vec{P_0Q}c0=P0P1×P0Q(判断 Q 相对于边 P0P1P_0P_1P0P1 的方向);
- c1⃗=P1P2⃗×P1Q⃗\vec{c_1} = \vec{P_1P_2} \times \vec{P_1Q}c1=P1P2×P1Q(判断 Q 相对于边 P1P2P_1P_2P1P2 的方向);
- c2⃗=P2P0⃗×P2Q⃗\vec{c_2} = \vec{P_2P_0} \times \vec{P_2Q}c2=P2P0×P2Q(判断 Q 相对于边 P2P0P_2P_0P2P0 的方向);
- 若三个叉积的符号一致(均为正或均为负,忽略零值的边情况),则 Q 在三角形内部;否则在外部。
2. 边情况处理(Edge Cases)
当 Q 落在三角形的边上时,可能被两个相邻三角形同时判断为 “内部”,导致像素重复着色。解决方法是制定 “边归属规则”,例如:
- 仅当点落在边的 “右侧” 或 “上侧” 时,才判定为属于该三角形;
- 确保每条边仅归属一个三角形,避免重复采样。

1.3.3 统一所有 2D 变换
此时,缩放、旋转、剪切也可升级为 3×3 矩阵,与平移统一:
- 缩放(Scale):S(sx,sy)=[1a0010001]S(s_x,s_y) = \begin{bmatrix} 1 & a & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix}S(sx,sy)=100a10001
- 旋转(Rotation):R(α)=[sx000sy0001]R(\alpha) = \begin{bmatrix} s_x & 0 & 0 \\ 0 & s_y & 0 \\ 0 & 0 & 1 \end{bmatrix}R(α)=sx000sy0001
- 平移(Translation):T(tx,ty)=[10tx01ty001]T(t_x,t_y) = \begin{bmatrix} 1 & 0 & t_x \\ 0 & 1 & t_y \\ 0 & 0 & 1 \end{bmatrix}T(tx,ty)=100010txty1
这种 “线性变换 + 平移” 的组合,称为仿射变换(Affine Transformation) —— 齐次坐标的核心价值就是将仿射变换统一为单一矩阵乘法。
1.3.4 光栅化的问题:走样(Aliasing)与锯齿(Jaggies)
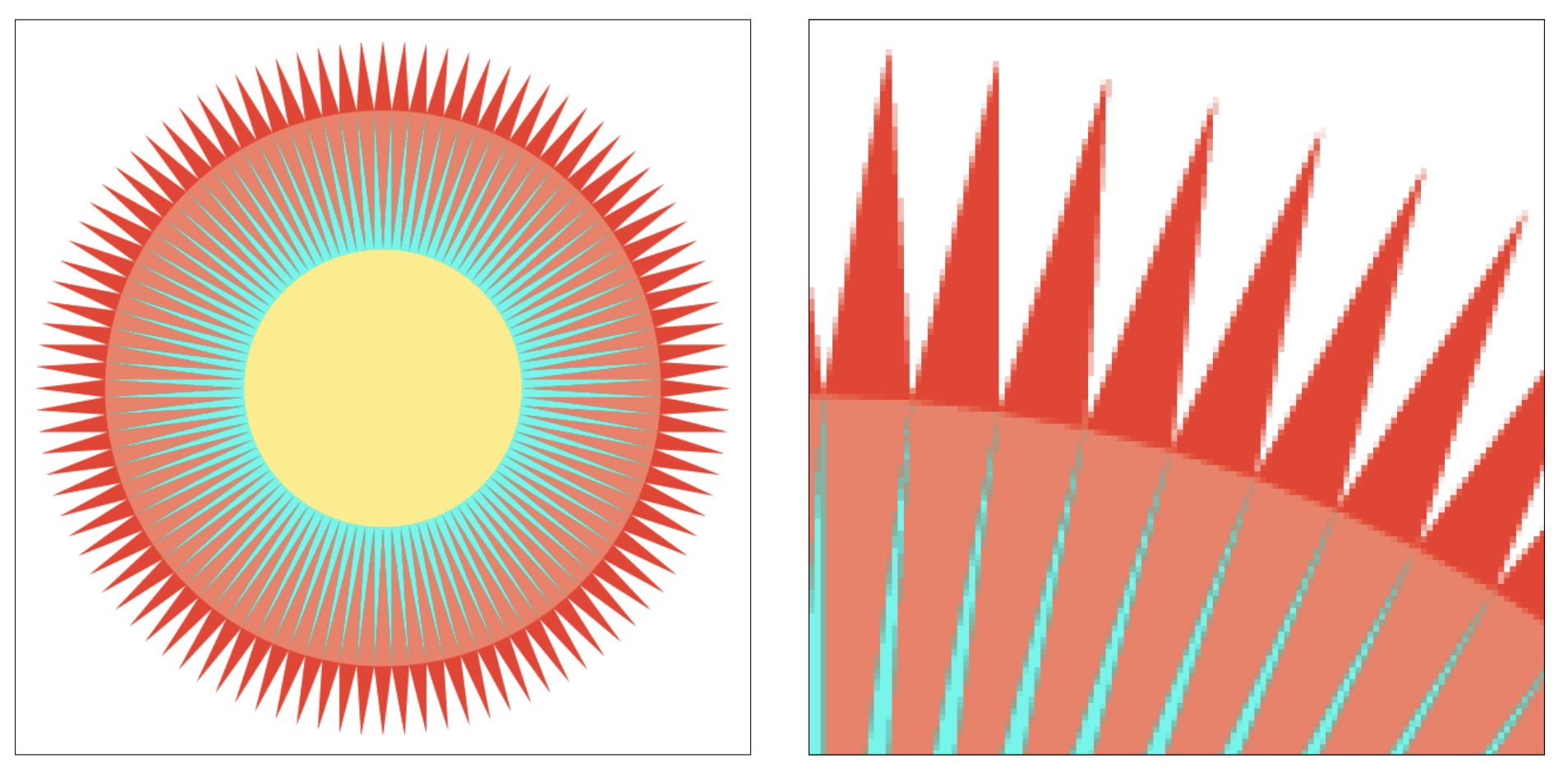
虽然基本光栅化能将三角形转换为像素,但会产生明显的 “锯齿”,这是采样过程中 “走样” 现象的体现。

走样(Aliasing)是 “连续信号离散化采样时,因采样频率不足导致的失真”,在光栅化中表现为:三角形的边缘呈现 “阶梯状”(锯齿,Jaggies);
原因:屏幕分辨率有限(采样频率固定),无法完美还原三角形的连续边缘,高频细节(如尖锐边缘)被低频信号(像素方块)替代。

1.3.5 补充:常见的光栅显示器
| 显示器类型 | 原理 | 应用场景 |
|---|---|---|
| 阴极射线管(CRT) | 电子束扫描屏幕,激发荧光粉发光,采用隔行扫描模式 | 早期电视、显示器 |
| 液晶显示器(LCD) | 通过液晶扭转偏振光控制透光率,背光照射产生图像 | 笔记本电脑、手机、显示器 |
| 有机发光二极管(OLED) | 有机材料通电发光,无需背光,对比度更高 | 高端手机、电视 |
| 电子墨水屏(E-Ink) | 微胶囊内黑白粒子受电场控制翻转,反射环境光显示 | 电子书(如 Kindle) |
二、光栅化(深度测试与抗锯齿)
2.1 走样(Aliasing)
要解决锯齿问题,首先需要理解 “走样” 的本质 —— 它不是图形学特有的问题,而是信号采样过程中频率不匹配导致的失真。
2.1.1 走样的常见现象
在计算机图形学中,走样以多种形式出现,核心都是 “高频信号被低频采样误导”:
- 锯齿(Jaggies):三角形边缘的阶梯状失真,是空间采样不足导致的走样;
- 摩尔纹(Moiré Patterns):拍摄密集网格或条纹时出现的彩色干涉图案,是图像 undersampling(采样频率低于信号频率)导致的走样;
- 车轮幻觉(Wagon Wheel Illusion):视频中车轮看似 “倒转” 或 “静止”,是时间采样不足导致的走样(采样频率低于车轮旋转的频率)。


这些现象的共同原因:信号变化速度(高频)超过了采样速度(低频),导致高频信号被错误地还原为低频信号,即 “频率混叠”。
2.1.2 走样的本质:信号采样理论
为理解走样,需先掌握信号采样的核心概念 —— 频率、采样率、Nyquist 频率,这些是反走样技术的理论基础。
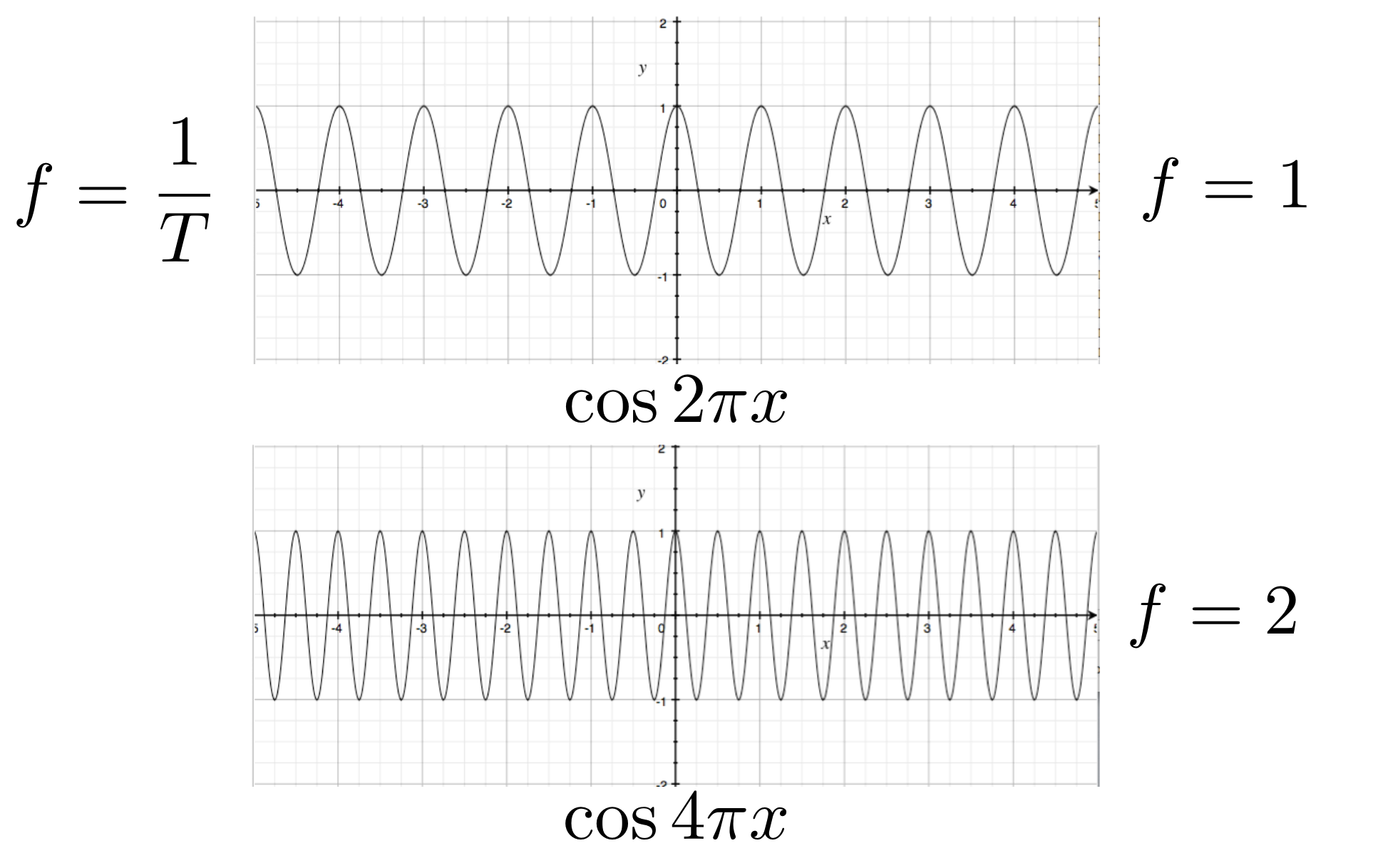
(1)信号的频率:变化快慢的度量
- 定义:信号在单位时间 / 空间内的变化次数,频率越高,信号变化越剧烈;
- 例:1D 信号中,cos(2πx)\cos(2\pi x)cos(2πx) 的频率为 1(每秒变化 1 次),cos(4πx)\cos(4\pi x)cos(4πx)的频率为 2(每秒变化 2 次,变化更剧烈);
- 图形学中的 “高频信号”:三角形边缘(颜色从背景色突变到三角形色)、密集纹理、细小物体等。
(2)采样率与 Nyquist 频率
- 采样率(Sampling Rate):单位时间 / 空间内的采样次数(如屏幕分辨率 1920×1080,空间采样率为 1920 像素 / 宽度);
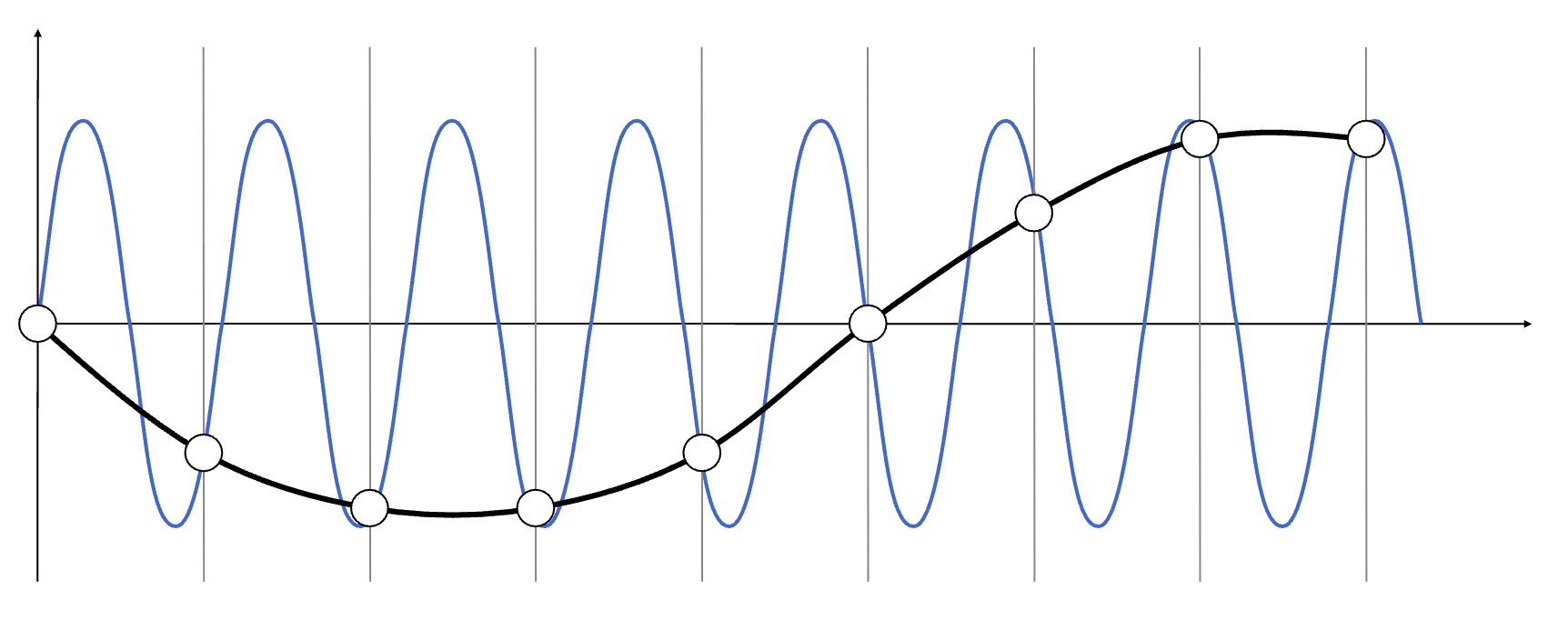
- Nyquist 定理:要无失真地还原信号,采样率必须至少是信号最高频率的 2 倍(即采样率 fs≥2fmaxf_s \geq 2f_{max}fs≥2fmax),其中 fmaxf_{max}fmax 是信号的最高频率,fs/2f_s/2fs/2 称为Nyquist 频率;
- 走样的根源:当采样率 fs<2fmaxf_s < 2f_{max}fs<2fmax 时,高频信号会 “折叠” 到低频区域,导致采样结果无法还原原信号,产生混叠(Aliasing)。
(3)图形学中的走样:空间采样不足
- 三角形边缘是典型的 “高频信号”(颜色在边缘处突变),而屏幕的像素采样率是固定的(如 1080P 屏幕的垂直采样率为 1080)。当边缘与像素网格不平行时,采样率低于边缘的 “空间频率”,导致边缘被采样为阶梯状(锯齿),即空间走样。

2.2 反走样(Anti-Aliasing)
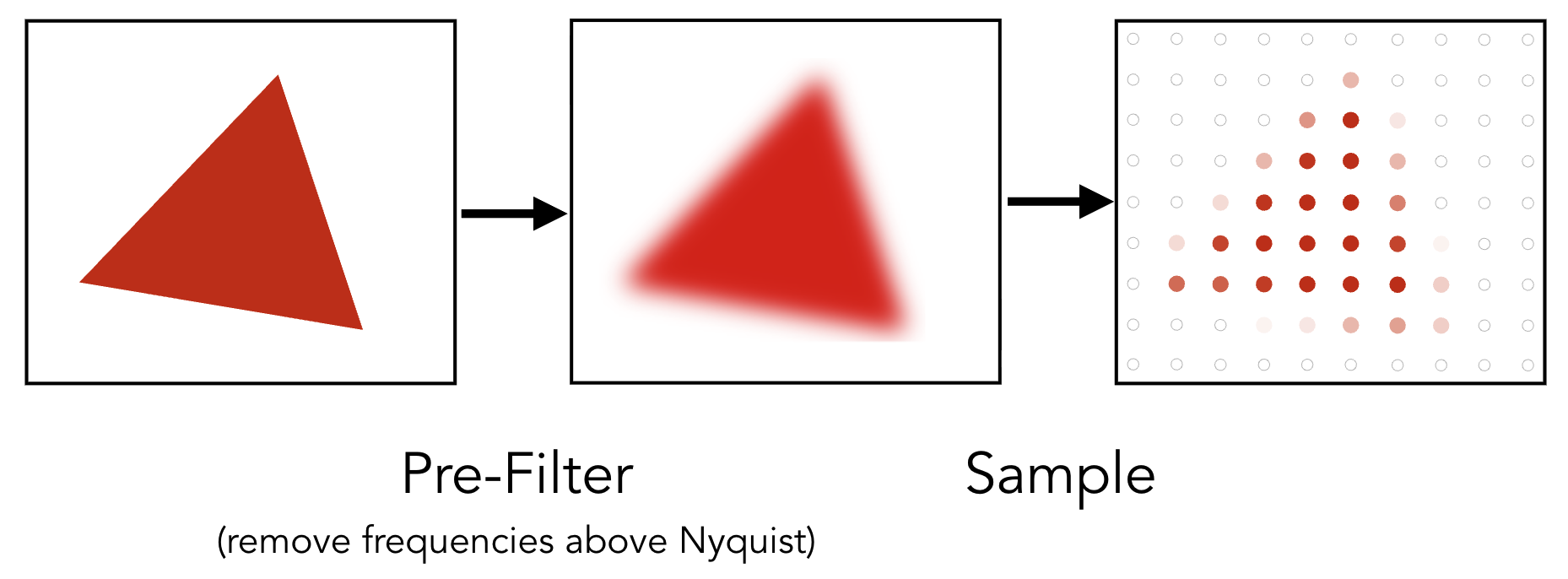
反走样的核心思路是 “先滤波,再采样”—— 通过过滤掉信号中的高频成分,使信号最高频率低于 Nyquist 频率,再进行采样,从而避免频率混叠。
2.2.1 反走样的理论逻辑:预滤波(Pre-Filtering)
- 滤波(Filtering):去除信号中不需要的频率成分,图形学中常用低通滤波(Low-Pass Filtering)——保留低频信号,过滤高频信号(如模糊处理,软化边缘,降低信号变化速度);
- 预滤波(Pre-Filtering):在采样前对原始信号进行低通滤波,确保信号最高频率低于 Nyquist 频率,再进行采样;
- 错误做法:先采样后滤波:若先采样(已产生走样),再对采样结果滤波(如模糊像素),只能模糊锯齿,无法消除走样根源;
- 正确做法:先滤波后采样:对连续的三角形信号先进行低通滤波(模糊边缘),再采样,此时边缘颜色从三角形色平滑过渡到背景色,锯齿自然消失。
2.2.2 图形学中的预滤波:像素区域平均
在三角形光栅化中,“预滤波” 的实际操作是计算像素被三角形覆盖的面积比例—— 像素颜色的透明度(或强度)与覆盖面积成正比,实现 “颜色平滑过渡”。
- 核心原理:原始光栅化中,像素颜色是 “非黑即白”(要么完全属于三角形,要么不属于),而反走样中,像素颜色是 “渐变的”: 若像素 100%
- 被三角形覆盖,颜色为三角形纯色; 若像素 50% 被覆盖,颜色为三角形色与背景色的混合(如 50% 透明); 若像素 0%被覆盖,颜色为背景色;
- 本质:将 “点采样”(仅判断中心)升级为 “区域采样”(计算覆盖面积),相当于用 “1 像素大小的盒式滤波器(Box Filter)” 对信号进行预滤波。
- 问题:计算覆盖面积成本高:直接计算像素与三角形的重叠面积(如积分计算)在实时渲染中效率过低,因此需要更高效的近似方法 ——超采样(Supersampling, SSAA)。
2.2.3 实用反走样方法:超采样(SSAA)与多重采样(MSAA)
超采样是 “区域采样的近似实现”,通过在单个像素内采集多个样本点,用样本点的 “内外比例” 近似覆盖面积,从而实现反走样。
超采样(Supersampling, SSAA)
- 核心逻辑:
- 提高采样率:在每个像素内均匀采集 N×N 个样本点(如 2×2、4×4);
- 判断样本归属:对每个样本点,用叉积判断是否在三角形内;
- 平均计算像素颜色:像素颜色 =(三角形内样本数 / 总样本数)× 三角形色 +(背景样本数 / 总样本数)× 背景色;
- 示例(2×2 超采样):像素内采集 4 个样本点,若 2 个在三角形内,则像素颜色为 “50% 三角形色 + 50% 背景色”,边缘呈现半透明过渡,锯齿消失;

- 优点:反走样效果好,逻辑直观;
- 缺点:性能成本高 ——N×N 超采样的计算量是原采样的 N² 倍(如 4×4 超采样需多计算 16 倍的样本点),实时渲染(如游戏)中难以承受。
多重采样(Multisampling, MSAA):SSAA 的优化版
- SSAA 的痛点是 “对所有像素都进行高频率采样”,但实际上只有边缘像素需要多采样,内部像素 100% 被覆盖,无需多采样。MSAA 通过 “共享样本 + 仅存储深度 / 模板信息” 优化性能:
- 核心改进:
- 样本点共享:相邻像素共享边缘的样本点(如 2×2 MSAA 中,4 个像素共享 4 个样本点,而非每个像素单独 4 个);
- 仅对边缘像素计算颜色:内部像素只需 1 个样本点判断归属,边缘像素根据样本点比例混合颜色;
- 存储优化:仅存储样本点的深度(Z 值)和模板(Stencil)信息,颜色信息按像素存储,减少内存占用;
- 优点:反走样效果接近 SSAA,但性能成本远低于 SSAA,是游戏和实时渲染中最常用的反走样技术;
- 常见参数:2×MSAA、4×MSAA、8×MSAA,采样数越多,反走样效果越好,但性能消耗也越高。
2.2.4 其他反走样技术简介
除了 SSAA 和 MSAA,还有多种针对不同场景的反走样方法,GAMES 101课程提及了三类:
- FXAA(Fast Approximate AA):快速近似反走样,在光栅化后对图像进行边缘检测和模糊处理,性能消耗极低,但效果略逊于 MSAA,适合性能有限的设备;
- TAA(Temporal AA):时间性反走样,利用相邻帧的采样信息(如第 1 帧采样像素左上,第 2 帧采样右上),通过时间累积实现反走样,可在低采样率下获得接近高 MSAA 的效果,广泛用于 3A 游戏;
- DLSS(Deep Learning Super Sampling):深度学习超采样,利用 AI 模型将低分辨率图像 upscale(放大)到高分辨率,并同时消除锯齿,兼顾性能和画质,是近年来的热门技术(如 NVIDIA 的 DLSS 3)。
反走样的核心结论
- 没有免费的午餐:反走样效果与性能成本成正比,需根据应用场景(实时 / 离线)选择合适的方法;
- 离线渲染(如电影):可使用高倍 SSAA 或光线追踪中的自适应采样,追求极致画质;
- 实时渲染(如游戏):优先选择 MSAA、TAA 或 DLSS,在画质和性能间平衡。
三、疑难点整理总结
待补充。
写在最后
💗 感谢各位 📖 读者的支持,如果觉得文章对你有用,请 ♥️ 点赞 🌟 收藏,笔者将不胜感激 🌹~