最新电子电气架构(EEA)调研-3
而新一代的强实时性、高确定性,以及满足CAP定理的同步分布式协同技术(SDCT),可以实现替代TSN、DDS的应用,且此技术已经在无人车辆得到验证,同时其低成本学习曲线、无复杂二次开发工作,将开发人员的劳动强度、学习曲线极大降低,使开发人员更多的去完成算法、执行器功能完善。
五、各大车厂的EEA
我们调研策略是从公开信息中获得各大车厂的EEA信息,并在如下中进行展示。
我们集中了华为、特斯拉、大众、蔚来、小鹏、理想、东风(岚图)等有代表领先性的车辆电子电气架构厂商。
1、华为
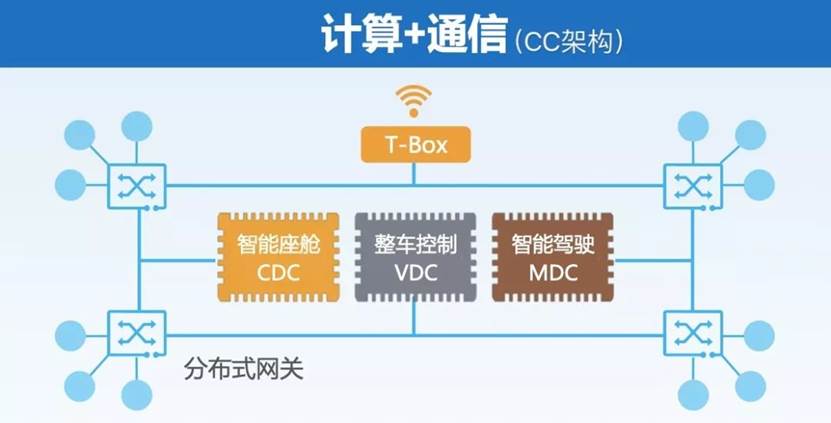
图12 华为的CCA电子电气架构
(1)华为“计算+通信”CC架构的三个平台
1)MDC智能驾驶平台;
2)CDC智能座舱平台
3)VDC整车控制平台。
联接指的是华为智能网联解决方案,解决车内、车外网络高速连接问题,云服务则是基于云计算提供的服务,如在线车主服务、娱乐和OTA等。
华为通过提供“芯片+操作系统”,将上述三大平台的每一个平台都打造成一个生态系统。
(2)思想
1)软件定义功能
2)分布式网络
3)智能座舱、整车控制、智能驾驶
4)资源与功能解耦、共享资源
5)软件可升级;硬件可以迭代;传感器可以扩展。
(3)整车实施
智能座舱域控制器CDC主要负责信息娱乐功能,智能驾驶域控制器MDC主要负责自动驾驶功能,整车控制VDC主要负责整车及底盘域的控制,相应的传感器、执行器甚至部分ECU就近接入。3-5个VIU之间通过高速以太网的环形网络进行连接,确保整车网络高效率和高可靠,实现数据传输、I/O口隔离等功能。
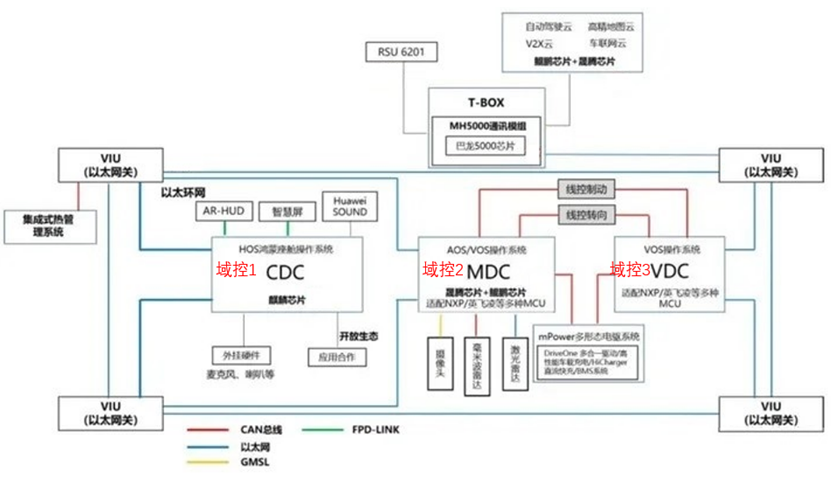
图13 CCA电子电气拓扑
1)MDC智能驾驶平台:昇腾芯片+智能操作系统是基础,通过传感器生态、智能驾驶应用生态和执行部件生态,将来实现智能驾驶。在传感器生态上,华为将自研激光雷达和毫米波雷达;在智能驾驶应用生态上,华为将希望合作伙伴基于MDC,开发算法和应用;在执行部件生态上,华为希望打造接口标准,让MDC与执行部件更容易配合。
华为MDC平台软件架构,其核心为华为自主研发的AOS+CP。AOS为华为自研的实时操作系统,兼容Linux接口,具有确定性调度,低延迟,功能安全和Security特性,并且兼容Linux驱动框架和三方库。
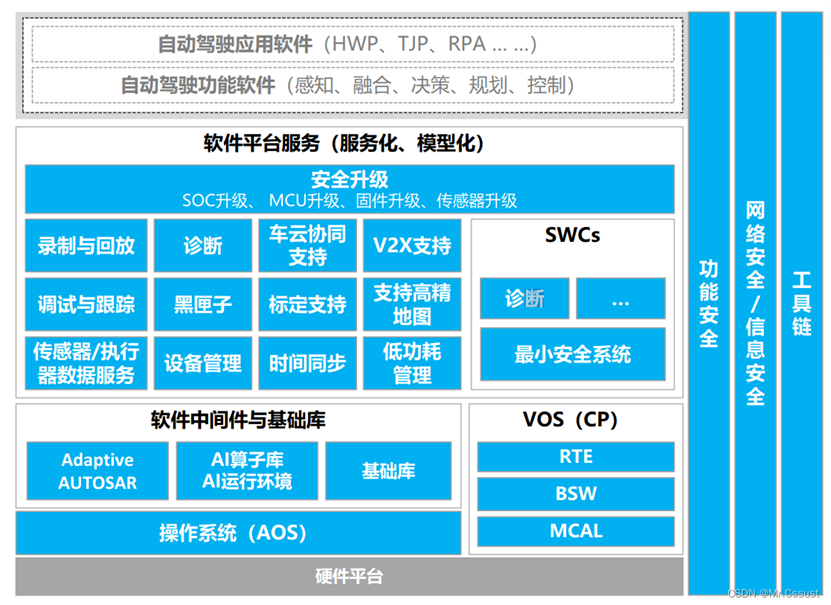
图14 华为MDC软件平台
2)CDC智能座舱平台:华为将基于智能手机麒麟芯片+鸿蒙OS,打造智能座舱平台,除了提供娱乐服务,未来自动驾驶实现后,会有更多的乘客服务和安全服务;
3)VDC整车控制平台:也就是智能电动平台,华为将开发一个MCU,以及一个整车控制操作系统,并将这个整车控制操作系统开放给车企,让车企基于VDC平台做好差异化的整车控制。
4)AOS软件框架
AOS为华为自研的实时操作系统,兼容Linux接口,具有确定性调度,低延迟,功能安全和Security特性,并且兼容Linux驱动框架和三方库。
无缝兼容AUTOSAR,在安全方面,支持安全隔离,Safety-Critical与Non-Critical应用安全隔离,软硬件Co-Design,去中心化架构,屏蔽单点软硬件故障,在确定性延迟方面是开源Linux的十分之一,内核延时小于10us,支持CC EAL4++。
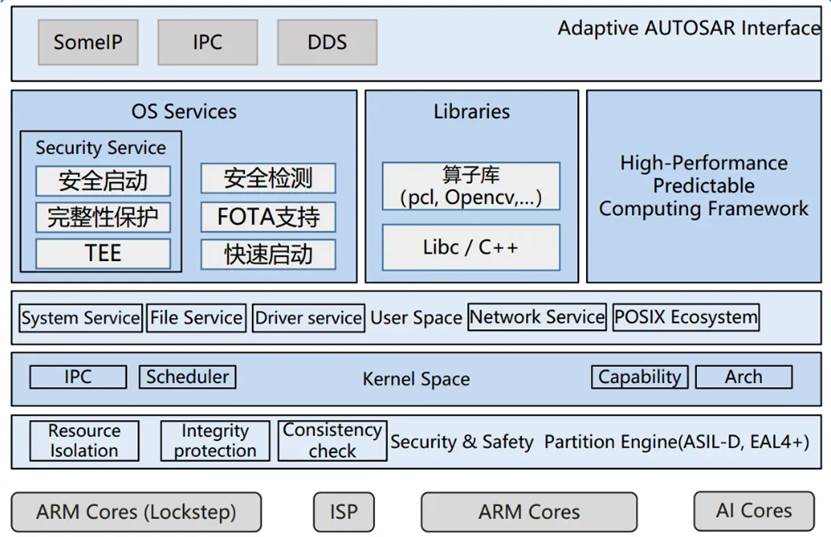
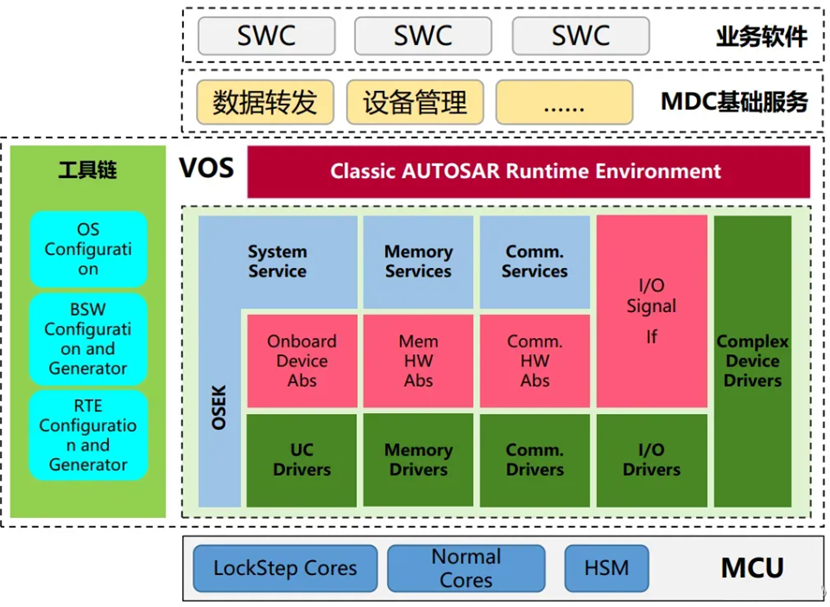
图15 华为AOS软件平台
5)CP
CP基于Classic AUTOSAR标准的VOS,满足AUTOSAR CP4.4规范,提供完整的CAN/ETH协议栈、诊断、NM、标定、存储等功能和服务,提供高功能安全的运行环境,支持客户开发/部署ASIL-D级别的业务 。并且如主流的AUTOSAR工具一样,图形化建模&开发工具,支持客户进行SWC的开发、BSW的配置等。
6)VOS
有基于Classic AUTOSAR标准的CP系统,满足AUTOSAR CP4.4规范,提供完整的CAN/ETH协议栈、诊断、NM、标定、存储等功能和服务,提供高功能安全的运行环境,支持客户开发/部署ASIL-D级别的业务。并且如主流的AUTOSAR工具一样,图形化建模&开发工具,支持客户进行SWC的开发、BSW的配置等。
7)区域控制器VIU
在问界M9上区域控制器用3个,分别为VIU1/VIU2/VIU3。
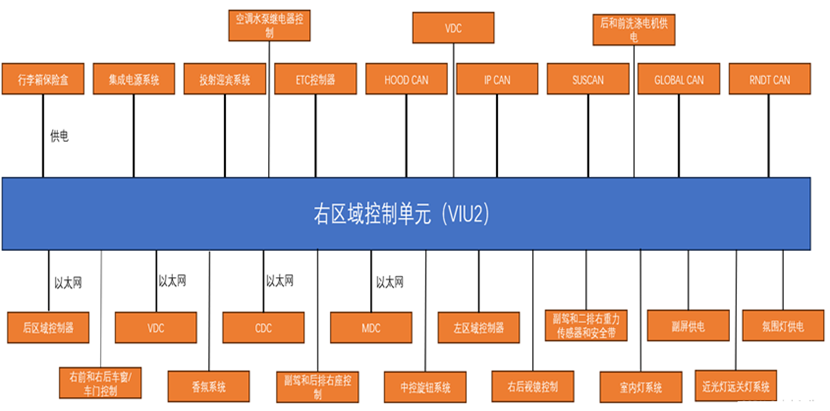
图16 问界M9右区域单元功能框图
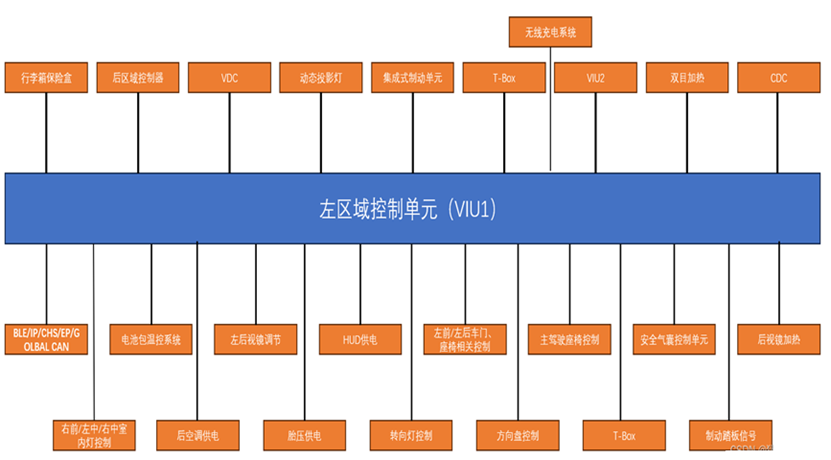
图17 问界M9左区域单元功能框图
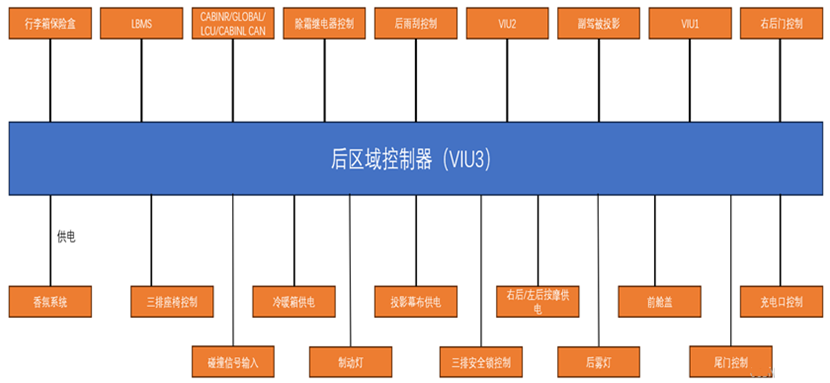
图18问界M9后区域单元功能框图
2、特斯拉
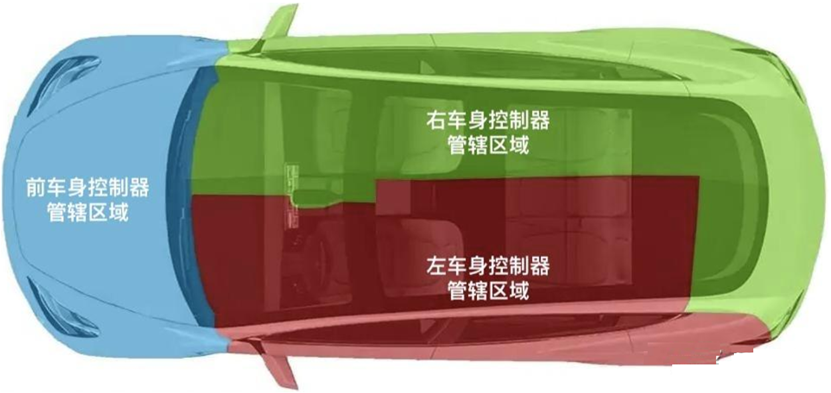
图19 特斯拉汽车“前-左-右”域控电子电气架构图
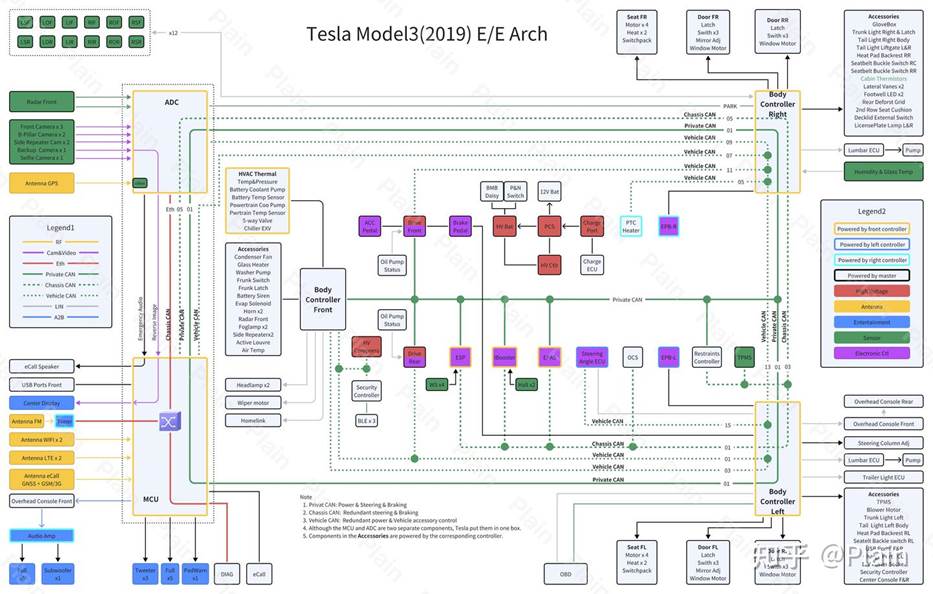
图20 特斯拉Model3的电子电气架构拓扑图
(1)前车身控制器(Body Controller Front)
位置:车头前舱附近,离低压蓄电池近,方便取电,金属外壳。
作用:负责前舱设备的配电和控制,同时为左/右车身控制器供电,为智驾Autopilot、座舱MCU供电。
控制:由ST的MCU作为主控,M0、M1、M2为安森美的直流电机驱动芯片,配合MOSFET即可驱动电机类负载(雨刮、液泵等)。
配电:由MOSFET + HSD实现配电通断控制(替代传统继电器),由AMS的ADC + 采样电阻实现电流监测。
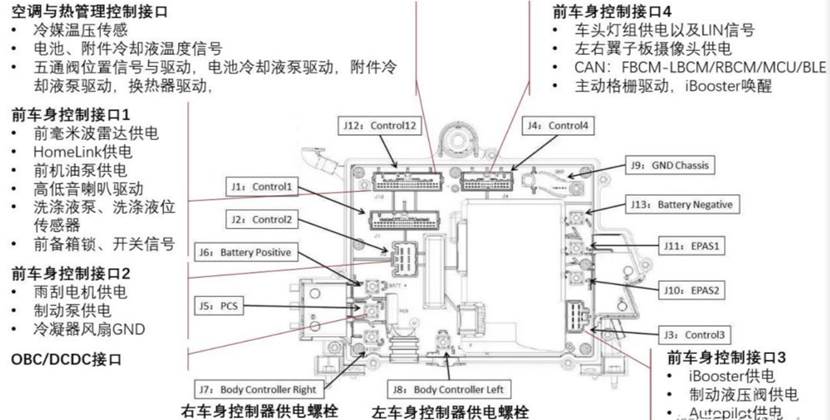
图21 特斯拉Model3的前车身控制器(FBCM)
(2)左车身控制器(Body Controller Left)
位置:主驾小腿左前方,沿车身纵向安装,塑料外壳PC材质。
作用:负责司机位及车辆左侧设备的配电和控制.
控制:由2颗ST的MCU作为配电控制和通信控制,1颗TI的MCU负责电机控制。
配电:灯具类由Infineon的BTS系列HSD芯片控制,电机类由ON的MOSFET驱动。
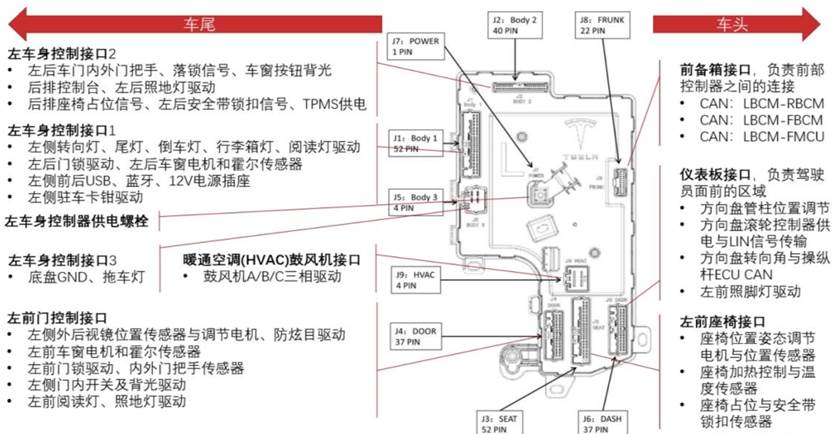
图22 特斯拉Model3的左车身控制器(LBCM)
(3)左车身控制器(Body Controller Left)
位置:主驾小腿左前方,沿车身纵向安装,塑料外壳PC材质。
作用:负责司机位及车辆左侧设备的配电和控制.
控制:由2颗ST的MCU作为配电控制和通信控制,1颗TI的MCU负责电机控制。
配电:灯具类由Infineon的BTS系列HSD芯片控制,电机类由ON的MOSFET驱动。
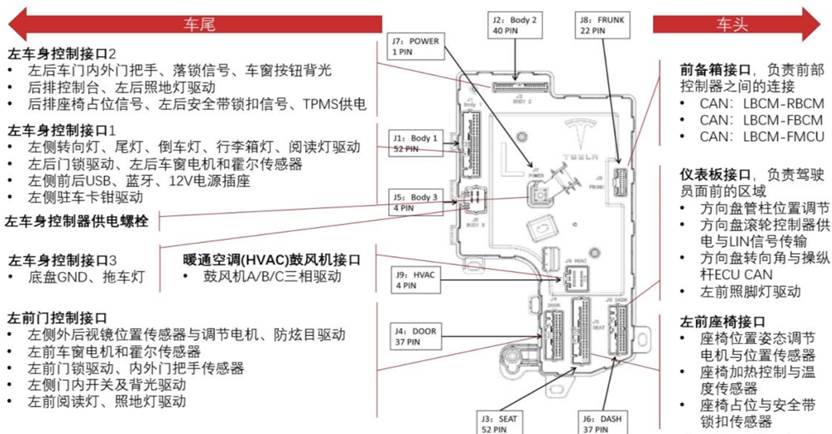
图22 特斯拉Model3的左车身控制器(LBCM)
(3)右车身控制器(Body Controller Right)
位置:副驾小腿右前方,沿车身纵向安装,塑料外壳PC材质.
作用:负责车辆右侧设备的配电和控制,同时也负责超声波雷达接入。
控制:相比于左车身控制器,还负责了车身后部的灯光&信号,所以主控由ST的MCU换成了瑞萨的高端单片机RH850系列,额外还有2颗ST的MCU辅助。
配电:同左侧。

图23 特斯拉汽车Model3的右车身控制器(RBCM)
(4)特点
1)系统部署按就近原则。
2)高度集成化,域控融合化(如座舱和智能驾驶融合,共用温控),降低成本。
3)自主可控化:对智驾、座舱、车身、电驱、PCS、BMS等核心控制器自研,打破了主机厂和供应商的固有分工模式,供应商更多的承担了提供执行器的作用,而执行器的控制则握在自己手里。
(5)座舱域控器演进对比
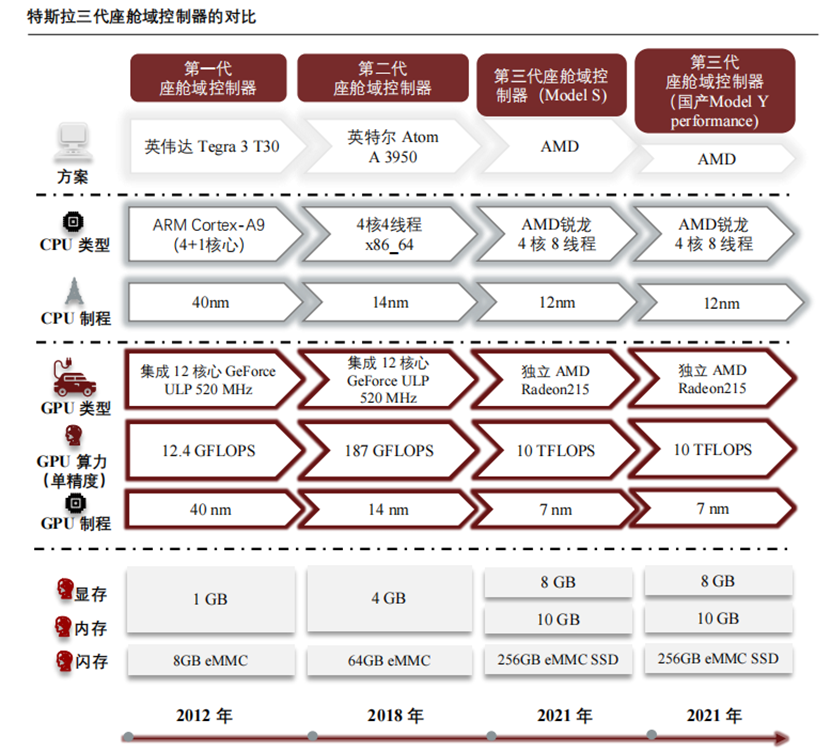
图24 特斯拉三代座舱域控演进对比
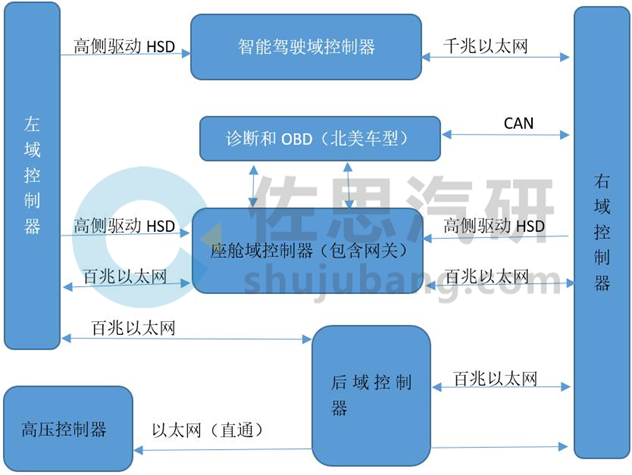
图25 特斯拉 Cybertruck电子电气框架
(6)不同车型的分析
严格意义上的域控制器的通信应该是以太网形成的“点对点”通信,为“数据定义”汽车打下基础。
特斯拉Model3通信主要用CAN总线方式,而CAN是基于信号,可以理解特斯拉Model3的域控制器(图23、24、25)不是一严格意义上域控制器。
Cybertruck 采用左右后三个域控制器,用以太网连接,智能驾驶 ECU 与右域控制器特别标注千兆以太网,其余应该都是百兆,其技术迭代还有进一步空间,但成本控制是一个核心。
3、蔚来
在数字工程化方面,蔚来目前是最为领先的车企,2022年,蔚来展示了其下一代中央计算集成式电子电气架构。
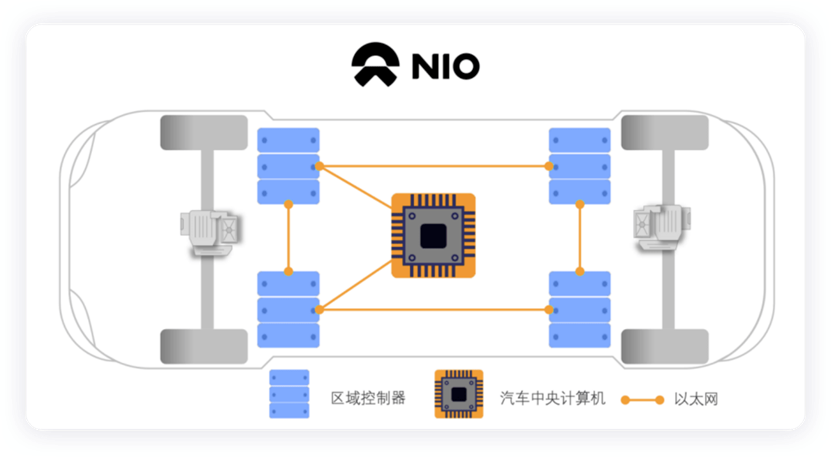
图26 蔚来下一代电子电气框架
(1)数字架构
2025年7月蔚来宣布自研“神玑 NX9031”智能驾驶芯片流片成功,并推出自研“SkyOS·天枢”整车全域操作系统,并在2025年12月16日正式发布ET9的数字架构上得到全部体现。
数字架构通过定义解耦的计算与通信框架,确保智能硬件、操作系统、算法和应用等各层面能够独立迭代,提升车辆的智能化能力和用户体验。
蔚来的先进数字架构创新性地将整车研发分为机械架构和数字架构两大部分,构建了一套以用户体验为导向、软硬件解耦、支持统型同构(多品牌、多车型)、并行增量和轻量化交付的产品研发体系。
1)机械架构:包括底盘、三电系统、各类执行器硬件;
2)数字架构:包括计算平台、传感器、通信、电源、软件、工具链、云和数据等。
图27 蔚来ET9系统框架
(2)数字架构特色
1)高速冗余通信网络:
A、采用环形网络拓扑结构;
B、使用千兆级带宽,低延时(小于1ms“端-端”通信延迟);
C、数据零丢包;
D、采用百纳秒级时钟同步精度,为其分布式系统提供协同;
E、采用通信协议栈(通信中间件)实现通信标准化。
2)区域控制器:
A、分布式边缘计算框架。
B、车控仲裁中心:实现不同优先级的服务判断,实现一定的信息安全处理。
C、面向SOA服务通信的信息通信网络。
D、区域集中式数据中心:通过以太网和CAN、LIN网络来分发数据。
E、整车配电枢纽:这里会有很多E-fuse来配合分电。
F、获取智能传感器的数据和控制智能执行器的行为。
3)双冗余低电压电源:
A、48V电力架构。
B、百路eFuse和双路冗余配电实现全节点智能控制和数据闭环,降低能耗,特别在静置、守卫模式、CLTC综合低压等功耗。
4)高感知座舱系统:
整个座舱系统配备了31个高性能感知硬件,如激光雷达、高清摄像、毫米波雷达等,并为智能驾驶提供赋能。
5)SOA软件框架和适配:
A、搭建系统适配层,与传感器、执行器、芯片、相关设备等,建立生态。
B、围绕SOA框架,建立强实时、轻量化、便利性、软件升级、数据闭环等模块,实现不同场景应用。

图28 蔚来ET9系统的核心要素
(3)中央计算机
ET9采用中央集成式架构,所有能力被抽象为服务接口,算力与设备被虚拟化。在高算力、集成度高的中央计算平台支持下,实现智能驾驶、智能座舱、智能底盘、车身、动力、云域融合。
图29 蔚来ET9中央计算机
(4)整车操作系统

图30整车操作系统
4、大众
CEA架构是大众汽车集团和小鹏联合开发的首个本土化电子电气架构,该架构将带来显著优势:三个高集成度的区域控制器将取代大量的电子控制单元——单车内控制单元的数量将大幅减少30%,这将显著降低成本与操作系统的复杂程度,同时提升运算性能和安全性。得益于高效的中央计算平台和强大算力,高级自动驾驶辅助等复杂功能可以更迅速、便捷地集成到架构当中。

图31 大众CEA电子电气架构
CEA的研发团队由来自小鹏汽车、大众汽车(中国)科技有限公司和CARIAD中国的技术专家组成。联合团队将强化以软件为导向的开发方式,推动包括自动驾驶和下一代智能网联功能在内的先进技术研发,构建一个基于区域控制及准中央计算的电子电气架构——包括区域控制器、中央计算平台、云平台和后台互联等功能,并快速、经济地将其集成到大众汽车品牌的车辆中。

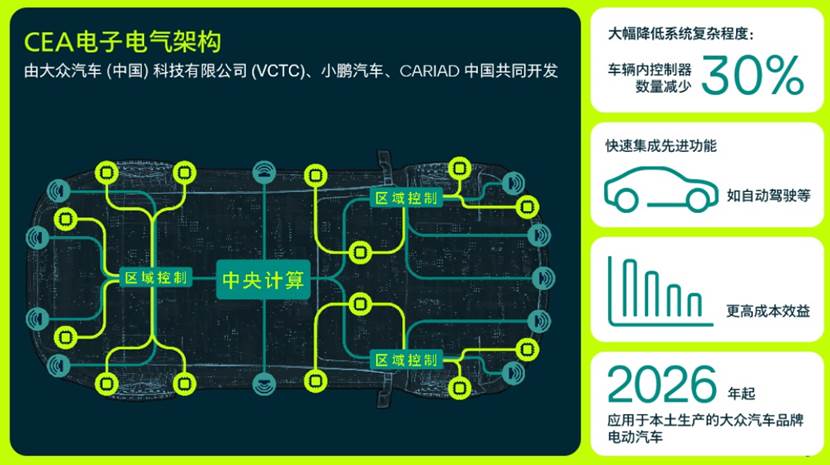
图32 大众CEA技术目标
5、小鹏
小鹏汽车引领着新一代智能化汽车的发展,从G9开始,小鹏的最新一代架构已经迈入了中央集中式电子电气架构的时代,采用了中央超算 (C-DCU) +区域控制 (Z-DCU) 硬件架构。G9基于X-EEA3.0电子电气架构,G6是3.5了。
(1)小鹏大模型

图33 小鹏端到端大模型由XNet、XPlanner、XBrain三部分组成
1)神经网络XNet:XNet是深度视觉感知神经网络,是“静态XNet”“动态XNet”与“纯视觉2K占用网络”的集成,可以比作智能驾驶的眼睛。其中“静态XNet”可以对感知到的数据进行实时3D建图,使智驾系统摆脱掉对高精地图的依赖,提高智驾系统的适应能力;“动态XNet”则具有对周边环境和交通参与者的行为进行预测与博弈的能力,并给出合理的决策,能够处理复杂的交通情况,提高驾驶的安全性和舒适性;“纯视觉2K占用网络”通过摄像头信息的分析,来构建3D体素来规划出空间内被占用和未被占用的路线,对现实世界中的可通行空间进行3D高真实度还原。深度视觉感知神经网络XNet的上车,能够对现实世界环境的重建更为精准,同时预测能力和行驶规划的能力也会更强,汽车感知范围提升2倍,面积可达1.8个足球场大小,能精准识别50个以上目标物。
2)规划大模型XPlanner:XPlanner同样基于神经网络,具备长时序、多对象、强推理的特点,能够结合分钟级以上的时序连续分析动机,并依据周边环境信息及时变通,生成最佳的运动轨迹,可以比作智能驾驶的小脑。通过海量“五星司机”的驾驶数据对规划大模型XPlanner进行训练,基于数据驱动模式迭代,取代人类手写规则代码,能让智驾系统的驾驶策略向着拟人化进化。效果上,规划大模型XPlanner能够让小鹏汽车的智驾系统在真实道路体验中减少50%的前后顿挫、60%的违停卡死以及40%的安全接管。
3)大语言模型XBrain:XBrain的能力就是让智驾系统拥有类似人类大脑的学习和理解的能力,以此来赋予智驾系统处理复杂场景甚至未知场景的泛化处理能力,以及对现实世界中宏观逻辑的推理能力。XBrain侧重于整个大场景的认知,XNet侧重于感知和语义。在XBrain的赋能下,小鹏汽车的智驾系统能够清晰地分辨出待转区、潮汐车道、特殊车道甚至是路牌文字,秒懂各种令行禁止、快慢缓急的行为指令,进而做出兼顾安全、性能的拟人驾驶决策,做出兼顾安全和效率的拟人驾驶决策。
(2)小鹏G6
1)中央超级计算机
中央超级计算平台是小鹏汽车的智能核心,在G9的时候,采用了高通8155P处理器 (后续会升级) 和瑞萨第三代旗舰MCU (这个可能也会迭代) ,拥有强大的性能和处理能力。
这个平台不仅包含了传统的仪表显示、中控和副驾信息娱乐功能,还实现了跨域融合,包括了车辆的各种控制功能,如车外声音控制、外部灯语控制等。
A、CDCU 的功能更多地集中在仪表显示、中控和副驾信息娱乐功能上,以及跨域融合功能,如中央网关、车外声音控制、外部灯语控制、氛围灯控制和泊车辅助灯功能。
B、XPU 这块主要是做智能驾驶。

图34 小鹏EEA3.0电子电气架构
C、架构特点:
a、算力集中化:中央超算(CCO)集成智驾、座舱、车身控制,算力冗余达1000TOPS;
b、通信革新:10G以太网+TSN时间敏感网络,延迟<20ms;
c、OTA效率:支持全车30个ECU同步升级,耗时缩短至15分钟。
2)SOA软件架构
X-EEA3.0的控制器依托SOA软件开发理念,针对各类软件使用需求的差异性,对整车软件进行了细致的三层划分,旨在加速智能功能的开发与迭代,如自动驾驶技术、智能语音控制的车辆操作与设置、以及多样化的智能场景应用等,确保这些功能能够迅速适应市场需求并不断优化。
A、系统软件平台:基于商业代码做部分定制开发,随整车基础软件平台冻结而冻结,可用于不同车型。
B、基础软件平台:多个整车基础功能软件均形成标准服务接口且在车辆量产前冻结,可用于不同车型。
D、智能应用平台:如自动驾驶、智能语音车控车设、智能场景等功能,可实现快速开发和迭代。
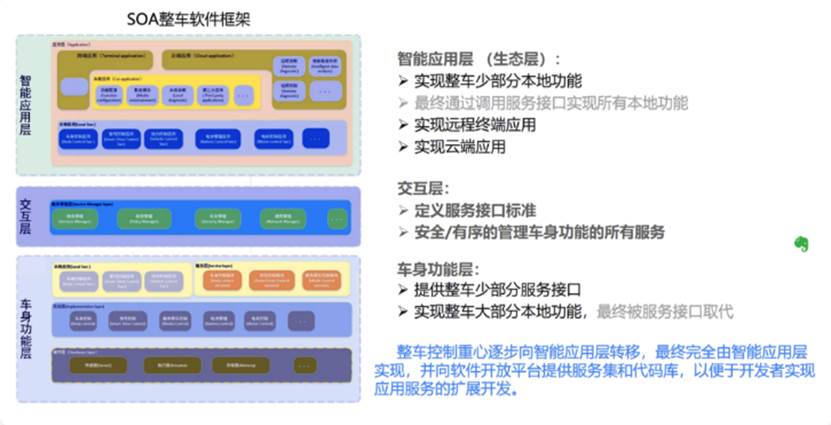
图35 小鹏的SOA架构
X-EEA 3.0架构包含中央及左右车身三个核心域控制器,与特斯拉架构相似。硬件上,以中央超级计算机和区域控制器为核心;软件分三层:系统软件、基础软件及智能应用平台;通信采用千兆以太网技术;数据架构支持无缝OTA升级,行驶中也可接收新功能;电源架构实现智能化电力管理,精准配电。
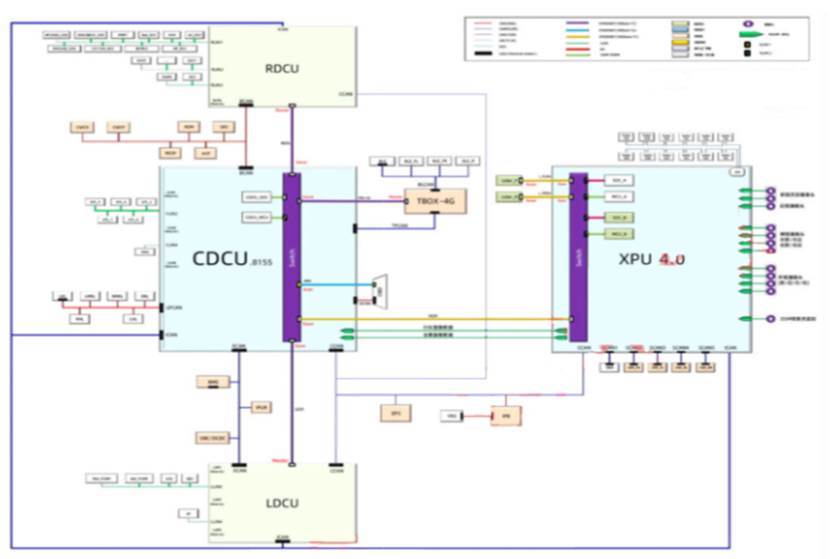
图36 中央超算 (C-DCU) +区域控制 (Z-DCU) 硬件架构
3)硬件架构
该设计采用了由中央数据处理单元(C-DCU)与区域控制单元(Z-DCU)构成的硬件体系:
C-DCU集中处理车辆控制、智能驾驶、座舱交互三大核心任务,而Z-DCU则分为左右两侧,将控制组件更加精细化地分区管理,依据就近原则高效接管各项功能,显著减少了车内线束的复杂性。
在域控制器内部,各功能区域被划分到独立的内存空间,确保软件升级时互不干扰,整个过程在半个小时内即可完成,并且实现了静默升级,用户甚至在驾驶过程中也能无感完成更新。
智驾领域的核心控制器为XPU,随着整体架构的不断演进,XPU也持续进行着升级迭代。
4)通信架构
X-EEA3.0采用了以千兆以太网为主线的通信架构,能够支撑大数据传输,从而实现高级自动驾驶、智能座舱、OTA等智能化功能,并且兼容多种通信协议。
从通信布局来看: 它配备了2条千兆以太网1000Base-T1线路,专门用于连接XPU4和5G智能天线;还有6条百兆以太网线路,其中2条分别连接左、右区域控制单元(LDCU和RDCU),1条用于诊断;另外还有4条CAN FD和CAN通信:底盘Chassis CAN以及与LDCU和RDCU的专有通信则采用了CANFD,而body CAN和PT CAN则因兼容性需求使用了高速CAN(速率为500kbps)。
相较于以CAN线为基础的E/E架构,X-EEA 3.0的千兆网络具有显著优势:
A、千兆网络的数据传输能力更强,不仅能满足当前需求,更能适应未来数据量的大幅增长,而CAN线的承载能力则存在上限。
B、其次,基于更强的数据传输能力,千兆网络在精确控制方面相较于CAN线也更具优势。
这种精确控制可以理解为对车内每个单元(如娱乐系统、动力电池、其他能耗设备)的高效管理。此外,千兆网络与未来的5G技术也更为契合,具有相应的优势。
5)电源架构
X-EEA3.0能够实现基于场景的精确电力分配,根据驾驶者的实际需求,在不同用车情境中定制电力供应。例如,在等人停车时,系统能仅向空调、音乐播放等功能供电,同时关闭其他非必要设备,从而有效节约能源,延长车辆的行驶里程。另外,车辆会定期进行自我诊断,主动识别并报告潜在问题,为维修提供明确指引。
智能配电系统的优化,使得各个ECU在不同运行模式下能够灵活调整工作状态。相较于以往,这种智能配电策略显著降低了能耗,实现了更为高效的能源管理。
6)功能架构
小鹏的中央计算核心C-DCU,主要由座舱系统与通信系统两大板块构成,这一设计理念与特斯拉不谋而合,均旨在打造一个以智能化、高科技为驱动的高性能超级计算平台,并实现了高度集成。
7)分布式智能区域控制
区域控制通过左右车身控制器的形式,将车身电子的负载接到左右域控制器上,实现了控制缩减线束的目的。 这些控制器支持各种车身控制功能,包括钥匙功能、尾门控制、车身控制、轮胎压力监测等,使得车辆在各个方面都能实现智能化的管理。
A、CDCU与其他模块的连接:
B、CDCU 与XPU以及TBOX之间的通信采用了1000Base-T1以太网。
C、与LDCU和RDCU以及OBD诊断口之间的通信则采用了100M以太网。
D、LDCU和RDCU的主控: LDCU和RDCU的主控采用了瑞萨的MCU,选择可能是出于其高性能、可靠性和成本效益考虑。实际可能长期来看,和NXP的产品,可以做持续的PK。
8)软件架构:SOA的应用
小鹏汽车的软件开发基于服务导向架构(SOA),将整车软件分为系统软件平台、基础软件平台和智能应用平台等层级,以便快速开发和迭代智能功能,如自动驾驶、智能语音车控车设等。
(3)小鹏P7
小鹏P7+采用全域800V高压SiC碳化硅平台+3C电芯,其高压系统如下图所示,在CLTC工况下最高续航可达 725km,依托领先的车身设计及制造工艺、高效的三电管理策略、自研的X-HP 3.0智能热管理系统、精准的驾驶控制四大技术准则,最终实现每度电能跑10公里。
P7+采用X-EEA3.5网络架构,其主要控制器包括XPU即智能驾驶域控制器,CDCU为座舱域兼中央域控制器,两个在一个水冷的盒子里。RDCU为右域控制器,LDCU为左域控制器。CCAN为底盘CAN,DCAN为诊断CAN,ECAN是动力驱动CAN,BCAN是电子水泵、无线充电、安全气囊、空调压缩总成、ETC等CAN,ICAN是座椅系统、流媒体后视镜CAN,TPCAN是TBOX系统CAN。BLCAN是蓝牙系统CAN,包括NFC通信模块、各个蓝牙模块等。域控制器之间都是千兆以太网连接。
小鹏P7+搭载小鹏自研的AI天玑5.4.0、端到端大模型以及AI鹰眼智驾方案。其中,AI鹰眼智驾方案应用了行业首个单像素Lofic架构、双Orin-X智驾芯片以及26个感知硬件,毫米波雷达用CAN-FD网络。超声波雷达也连接智能驾驶域控制器,显然是行泊一体。
小鹏EEA3.5与EEA3.0最大的区别在于座舱与智能驾驶相融合。CCP作为XEEA 3.5架构的核心计算节点,集成了包括智能驾驶、座舱、仪表、网关、IMU、功放等功能,实现40%的成本节约,同时性能提升50%。

图37 小鹏EEA3.5驾舱融合
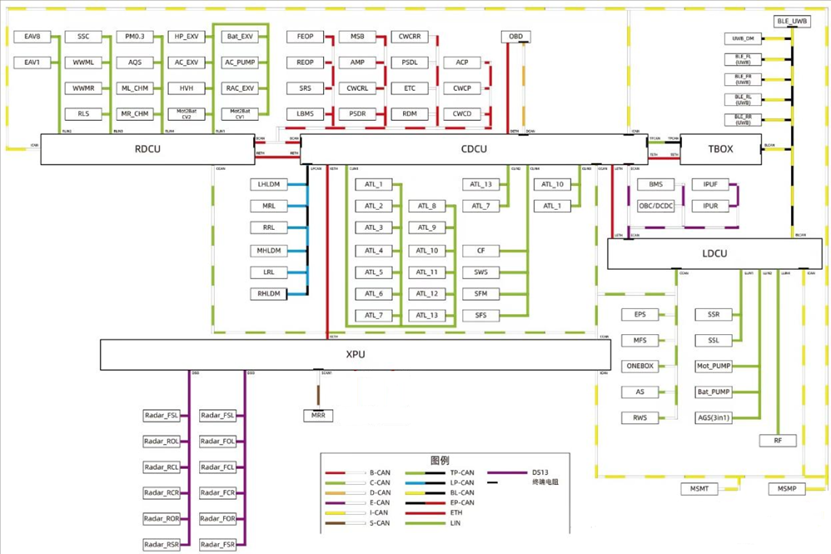
图38 P7+的整车网络架构
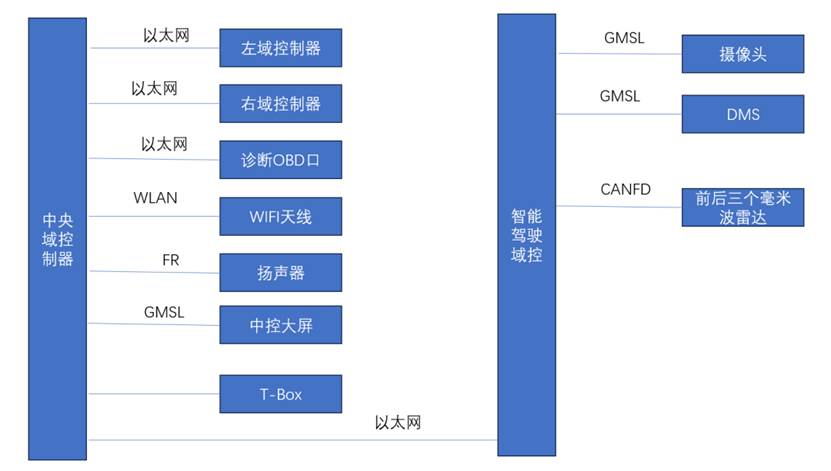
图39 P7+的网络架构中,中央域控和智能驾驶域控之间的连接
6、岚图
23年12月的岚图科技日上,岚图汽车将SOA电子电气架构命名为“天元架构”,包括1个中央控制器、4个区域控制器和Telematics-BOX车联网终端,旨在实现汽车的高度智能化和网络连接。
(1)架构物理拓补
基于车辆各部位的实际位置,物理架构把整车分成了四个大块,每个区域都配有一个区域控制器。这些控制器会按照就近原则,把附近的传感器和执行器接口都整合起来。执行器里既有像电机、灯光这样独立的设备,也有电机和机械结合在一起的设备。同时,所有的决策和控制软件都被整合到了一个中央计算平台上,这样做能让软件的功能更加专一,也更容易重复使用。
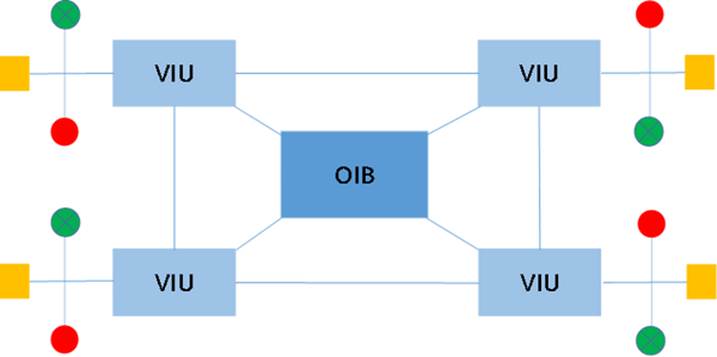
图40 岚图“天元”电子电气架构
(2)架构功能拓补
是以SOA架构为核心,以功能IPO模型为核心,进行了三层功能分配。该架构将功能逻辑的核心集中于中央计算平台OIB,实现了整车控制、舒适性、信息娱乐及自动驾驶辅助(ADAS)功能的深度融合。
OIB作为处理中心,统一调度和控制所有功能,确保系统高效运行。区域控制器VIU作为桥梁,集成输入输出接口,智能化配电控制电子设备,并作为数据中心保障数据顺畅传递。传感系统负责感知外界信息,执行机构根据指令执行动作,形成从感知到执行的全链条闭环控制。
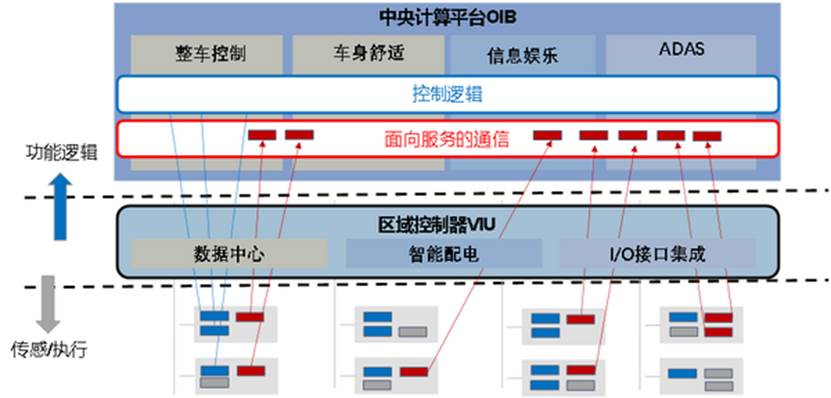
图41 岚图“天元”电子电气架构逻辑图
(3)中央计算平台OIB
岚图的集中式电子电气架构以中央控制器 OIB、区域控制器 VIU、车联网终端 T-BOX 为核心,集成车辆控制、动力、智能驾驶、智能座舱,并覆盖车端、云端、生态端。
(4)区域控制器VIU
岚图的VIU区域控制器集成了区域数据中心、智能配电和智能分区控制三大功能,能高效处理车辆的多项指令。它根据车辆物理布局设计,缩短了线束长度,简化了维修保养,并减少了零件数量以提升续航能力。此外,VIU预留了标准接口,能驱动高功率执行器,并具备数据备份、故障监控和远程诊断功能,全方位保障车辆安全运行。
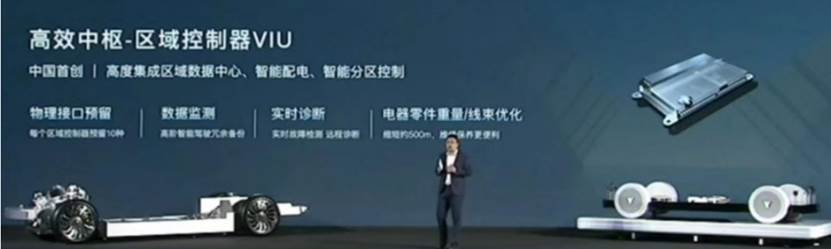
图42 岚图区域控制器
(5)软件架构
1)岚图的软件架构同样采用SOA,各家的技术路线规划大同小异。
2)岚图的SOA可开放的接口达300+,可以在其共创平台上编辑共创。
7、理想
(1)理想EEA架构的三步走:
1)理想的EEA发展分三步走:从分布式架构开始,过渡到域控架构,再到重要中央计算单元架构。
2)分布式架构主要应用在理想ONE,主要围绕:NOA自动驾驶控制器和 HU智能座舱控制器展开。
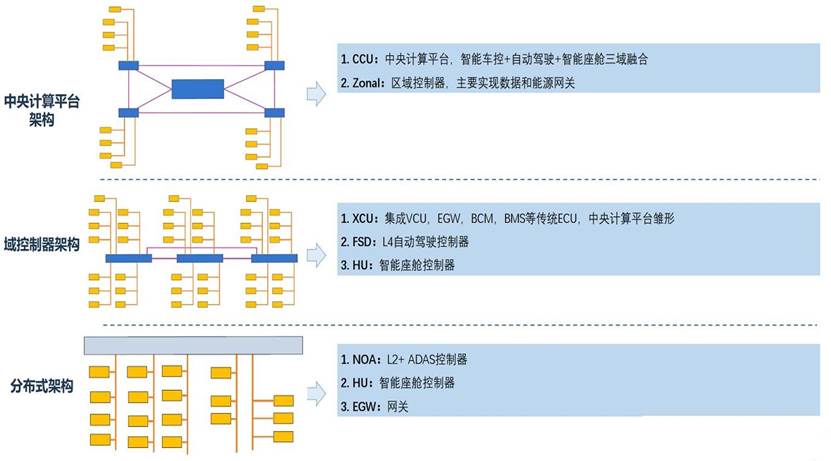
图43 理想架构发展路线图
(2)理想的中央计算平台 + 区域控制架构
1)理想的域控架构之后的下一代就是:中央计算平台 + 区域控制器架构,并且会加入800V快充技术。
2)中央计算平台(CCU)与特斯拉FSD的思路一样,将智能座舱控制和自动驾驶控制,以及车辆控制融合到一个控制器中,但是目前还不清楚是各个功能分离成不同的PCB板,还是全部融合到一块PCB板上。
3)CCU的功能架构(如图6所示),CCU将车辆控制、自动驾驶、智能座舱多域融合,硬件资源共享,数据实时共享。
在硬件上采用各领域内最先进的芯片,并通过高带宽低时延Switch级联,实现算力扩展和多域融合;
软件方面具有高安全,硬实时OS, 中间件及应用运行环境,软件的性能参数,具有延时低、高算力等特点。
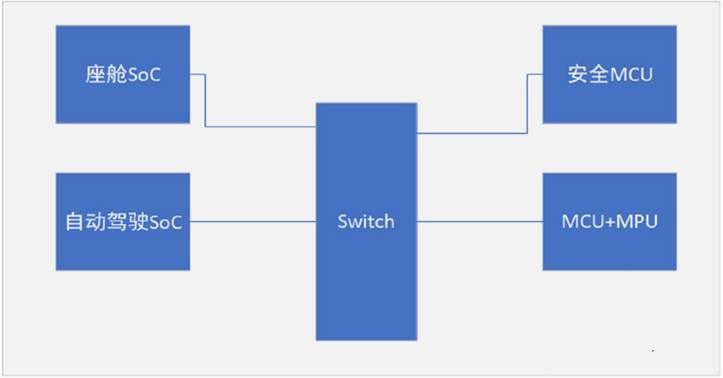
图44 理想汽车CCU的内部功能架构

图45 CCU内部软件的性能参数
(3)理想星环 OS 技术架构

图46 星环OS系统架构
1)智能驾驶 OS 的系统架构
智能车控 OS(VCOS: Vehicle Control Operating System)是面向车辆控制的操作系统,支撑智能汽车高安全、高实时的核心车控业务部署。系统通过硬实时调度架构确保动力控制、底盘控制等关键任务精准响应,实现感知与决策系统的高效协同,构建从硬件到软件的全链路安全防护体系。智能车控 OS 在实时性、确定性和功能安全等维度显著领先业内系统,并配备覆盖开发调试、仿真验证的可视化工具链,有效提升车企在智能控制系统开发、测试及迭代的效率。

图47 智能车控OS的系统架构
A、全方位软硬解耦
智能车控OS采用了内部设计实现了一个逻辑清晰、交互间接的芯片抽象层,通过多维度抽象建模(覆盖 CPU、驱动、编译等),有效屏蔽了底层硬件差异,为上层系统提供了一致且稳定的视图。这种“隔离”设计使得适配新硬件时,把原本需要的绝大部分修改提取到抽象层内部,并借助自动化代码生成工具,适配工作量被大幅削减。

图48 智能车控OS的解耦逻辑
B、算法保障硬实时
借助一体化工具链和全局寻优算法支撑,进一步提升跨系统交互的端到端实时性,其核心能力如下:
a、硬实时内核:实现了微秒级中断处理和任务切换,保证极低且可预测的中断延迟与切换开销;基于抢占式优先级调度策略,最大限度减少任务阻塞与不确定性。
b、一体化工具链:提供端到端时序分析与验证功能,协助开发者在设计阶段分析复杂系统的实时性表现;基于全局寻优算法生成最优系统配置,并确保系统可以按照优化后系统配置执行,将“事后调试”转化为“设计阶段保障”。

图49 智能车控OS的算法及强实时逻辑
C、全链路压缩通信时延
智能车控 OS 内部基于自研确定性网络、轻量化协议栈、协议栈多核部署等关键技术,大幅缩短了远端访问时延。
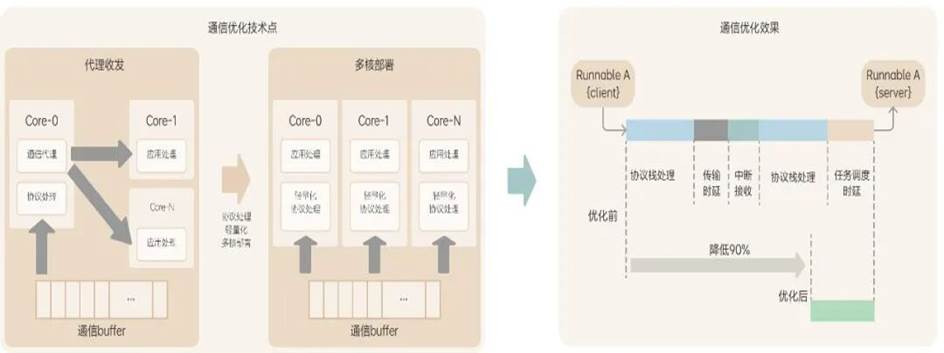
图50 智能车控OS的跨域及端-端通信时延逻辑
2)虚拟化引擎
星环 OS 虚拟化引擎(LiVisor)是用于构建车端 AI 计算中心的虚拟化底座,它通过对 CPU、内存、NPU 以及 I/O 外设进行资源池化管理与安全隔离,在集中式硬件平台上支持车端智能驾驶、智能车控等多域业务的并发运行与协同。在底层充分结合硬件特性进行软硬联合定制化设计,满足不同客户机对冷热启动、跨域通信、高速外设访问等特性的高性能需求。
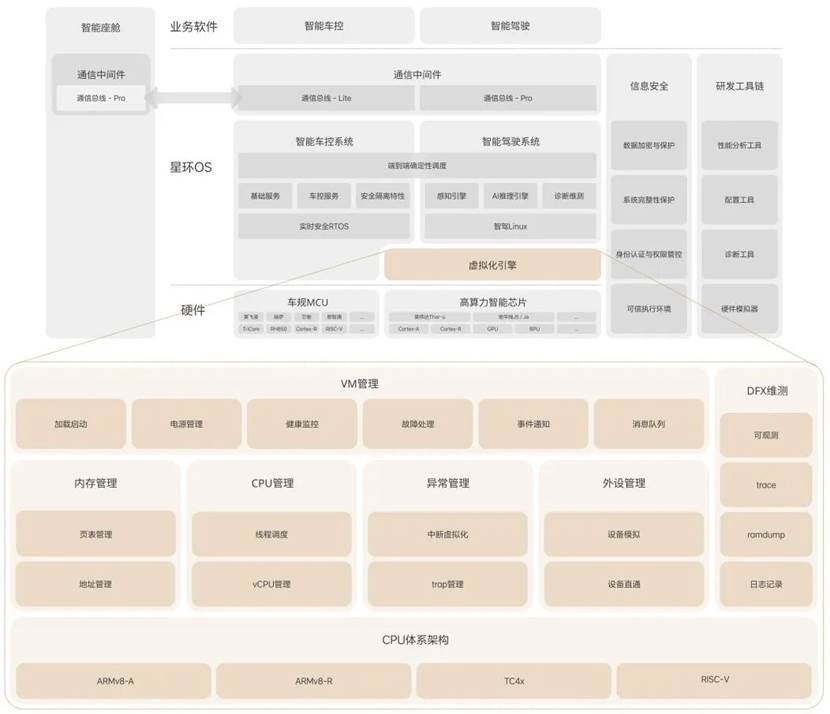
图51 虚拟引擎逻辑
A、高效资源共享
对车载域融合场景中 UFS、以太网控制器等非硬件虚拟化设备的共享需求,传统 virtio半虚拟化方案会导致 30%~40%的I/O性能损耗。星环OS虚拟化引擎重构vhost 控制面框架,推出基于virtio 的增强技术 VMExit-Less。通过消除虚拟机上下文切换(VM-Exit),显著减少数据传输时延,极大提升设备虚拟化吞吐性能。
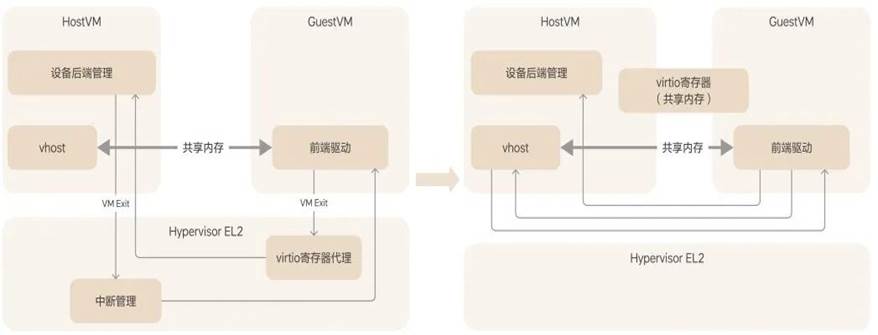
图52 引擎资源处理逻辑
B、高速跨域互通
星环 OS 虚拟化引擎采用了共享内存机制,实现了跨 VM 间的零拷贝通信,确保各类跨 VM 通信场景的实时性。
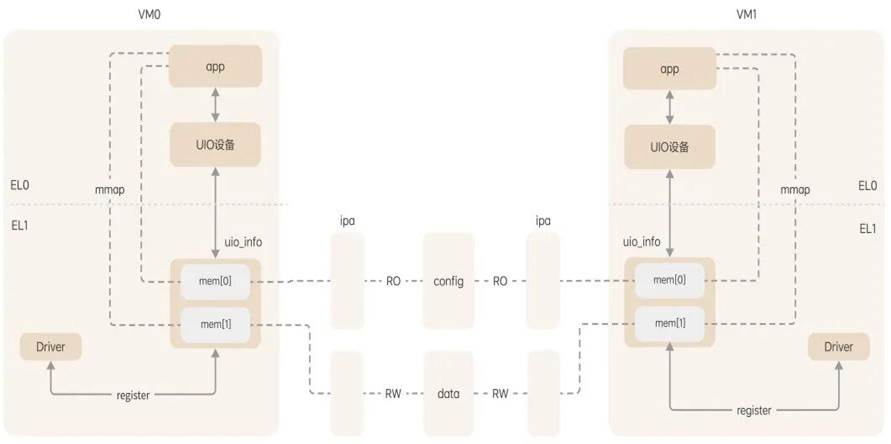
图53 跨域互通结构
3)通信中间件
星环OS通信总线(VBS,VehicleBus System)是专为智能汽车领域打造的高效数据交互通信平台。该平台依托标准化的通信协议、模块化架构以及卓越的实时数据传输能力,为整车电子电气系统构建起一条实时且可靠的信息高速公路。凭借这一平台,智能驾驶、动力控制、信息娱乐、主动安全等关键服务得以实现无缝协同,为智能汽车的高效运行与功能拓展提供坚实保障。
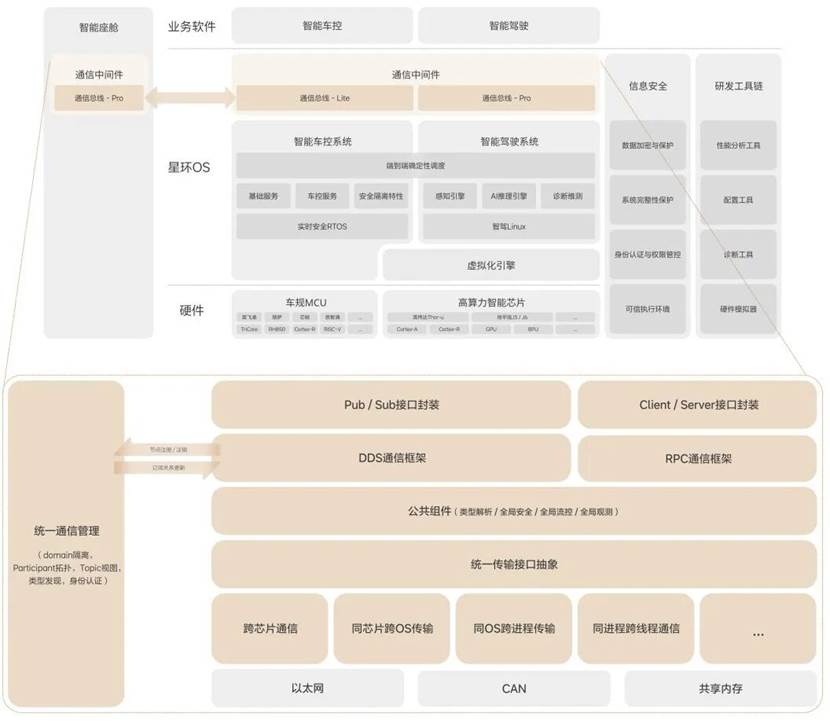
图54 通信总线结构
A、全域统一部署
新一代电子电气架构给车载通信中间件带来两大技术难题:(1)智能驾驶系统要求海量传感器数据能在毫秒级内确定性传输;(2)车控域芯片算力与存储空间有限,却需部署管理数百个通信主题(topic)。
当前行业内的通信中间件仅能在限定域场景下解决部分问题,导致车载场景全域系统部署时通信协议割裂,工程化管理与维护成本很高。星环OS通信中间件基于车载场景实现定制化的DDS通信协议,实现面向MCU轻量化设计,构建起真正全域统一的通信基座,核心特点如下:
a、VBSPro 版本:运用无锁化设计与自适应序列化/反序列化等技术,实现跨进程零拷贝数据传输,提升数据传输效率;通过发送端消息过滤与定频消息去重等机制,有效减少无效数据传输。
b、VBSLite 版本:借助自定义通信协议、传输通道智能合并、逻辑通信端点等技术创新,降低对系统内存占用,满足了各类资源受限 MCU 部署场景需求。
c、通用特性:VBSPro版本与VBSLite版本均采用统一的跨域数据传输协议,这使得全域通信无需进行复杂的多协议间交互,简化了通信流程,提升了系统整体的兼容性与易用性。
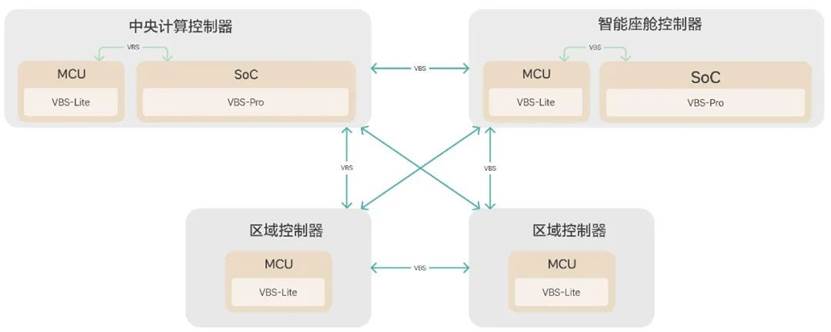
图55 功能模块间通信链接
B、多传输协议自适应
星环OS通信中间件设计实现了多传输协议自适应方案,支撑业务使用统一接口层,底层可在跨芯片、芯片内异构核之间、核内多进程之间等不同场景下,自适应匹配到底层以太网、CAN、共享内存等传输介质上,从而有效简化开发流程。
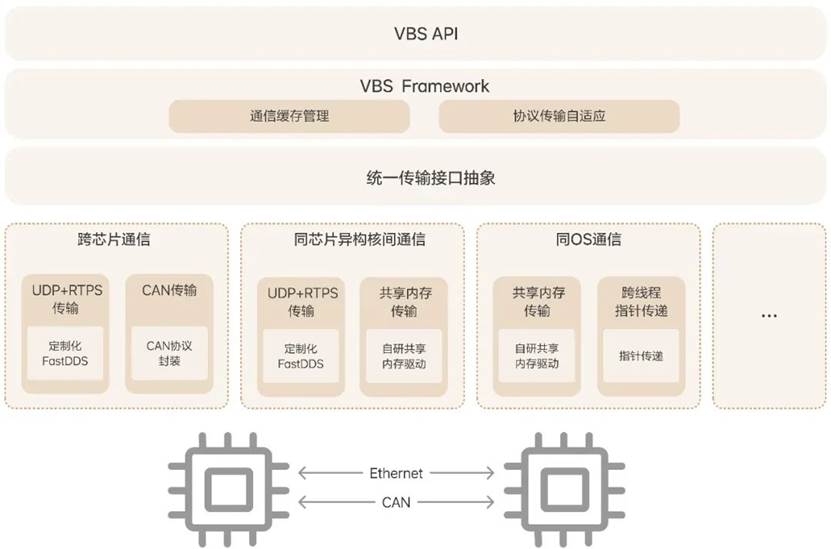
图56 通信自适应结构
C、可靠性机制
星环 OS 通信中间件不仅支持 E2E 校验、丢包重传、按序到达以及网络拥塞控制等基础传输可靠性保障机制,还实现了多路冗余传输方案、共享内存异常无感恢复等可靠性增强方案,确保关键指令(如主动安全相关指令)能够可靠到达,同时实现传输低延迟,以适应严苛的车规级环境。其中多路冗余传输方案的原理如下图所示:
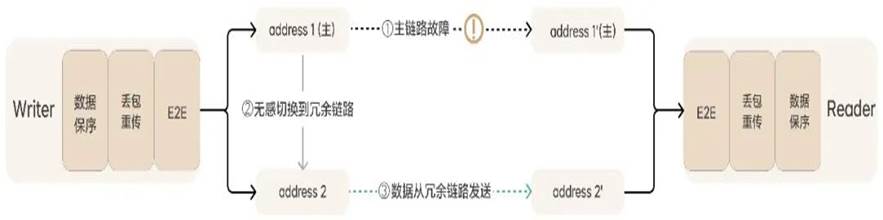
图57通信可靠性结构
D、多层级安全防护
星环OS通信中间件基于车载场景进行安全防护增强,实现三级安全防护,如下所示:
a、设备级:采用一机一密PKI 身份认证机制,确保非法设备无法探测到授权设备所提供的服务,从源头上阻止非授权设备接入网络,保障设备层面的安全。
b、应用级:通过对通信实体应用进行权限控制,只有经过签名的可信应用之间才能建立通信,有效防止非可信应用干扰或窃取通信数据,保障通信过程的安全性与可靠性。
c、数据级:运用会话级数据加密技术,即使报文被中间人截获,由于缺乏有效的解密密钥,也无法获取原文内容,全方位保障数据在传输过程中的保密性。
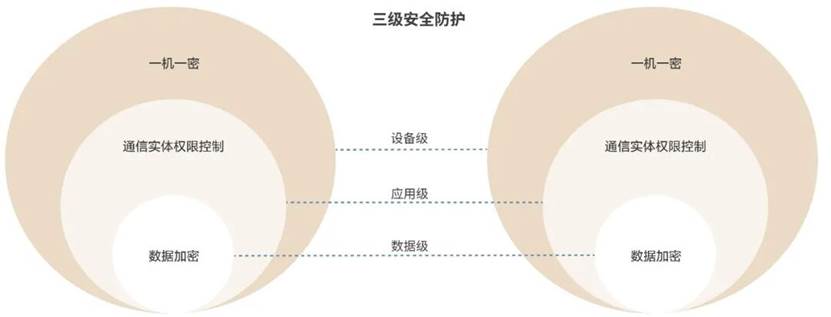
图58 通信安全结构