《小白学随机过程》第二章:常见的随机过程——详细解读马尔科夫决策过程MDP和强化学习(2 值迭代和策略迭代 附python代码
文章目录
- 值函数
- 贝尔曼函数
- 贝尔曼期望函数(Bellman Expectation Equation)
- 贝尔曼最优函数 (BellmanOptimalityEquationBellman Optimality EquationBellmanOptimalityEquation)
- 关系
- 如何求解贝尔曼最优函数
- 值迭代与策略迭代:理论部分
- 1. 共同前提
- 2. 值迭代
- 3. 策略迭代
- 值迭代与策略迭代:案例实践
- 问题定义回顾
- 值迭代(及python实现)
- 策略迭代(及python实现)
上篇文章第二章:常见的随机过程——详细解读马尔科夫决策过程MDP和强化学习(1)挖了一个大坑,文章提到:
-
马尔可夫决策过程(MarkovDecisionProcess,MDPMarkov Decision Process, MDPMarkovDecisionProcess,MDP)是强化学习的理论基础。MDPMDPMDP 的求解目标是找到一个最优策略 π∗\pi^*π∗,使得从任意状态出发,智能体获得的期望累积回报(通常为折扣回报)最大。
-
根据是否已知 MDPMDPMDP 的完整模型(即状态转移概率 P(s′∣s,a)P(s' \mid s, a)P(s′∣s,a) 和奖励函数 R(s,a)R(s, a)R(s,a)),求解方法可分为两大类:基于模型的求解方法(Model−BasedMethodsModel-Based MethodsModel−BasedMethods)和无模型的求解方法(Model−FreeMethodsModel-Free MethodsModel−FreeMethods)
-
假设环境模型已知(即 PPP 和 RRR 已知),可通过动态规划等方法精确求解。常见的方法有基于动态规划的值迭代(ValueIterationValue IterationValueIteration)或策略迭代(PolicyIterationPolicy IterationPolicyIteration)方法。
本章准备填上这个坑,首先开始从环境模型已知的情况开始讲起。
首先需要完全理解+熟悉掌握几个公式,这是进一步学习的基础。如果你对下述表格内容非常熟悉,可以直接跳到《如何求解贝尔曼最优函数》章节,否则建议首先搞清楚这几个公式(专业名词)的含义
| 概念 | 定义 | 对应贝尔曼方程 |
|---|---|---|
| 状态值函数 Vπ(s)V^{\pi}(s)Vπ(s) | 策略 π\piπ 下从状态 sss 开始的期望回报 | 贝尔曼期望方程 (for VπV^{\pi}Vπ) |
| 动作值函数 Qπ(s,a)Q^{\pi}(s,a)Qπ(s,a) | 策略 π\piπ 下在 sss 采取 aaa 后的期望回报 | 贝尔曼期望方程 (for QπQ^{\pi}Qπ) |
| 最优状态值函数 V∗(s)V^*(s)V∗(s) | 所有策略中从 sss 开始的最大期望回报 | 贝尔曼最优方程 (for V∗V^*V∗) |
| 最优动作值函数 Q∗(s,a)Q^*(s,a)Q∗(s,a) | 所有策略中在 sss 采取 aaa 后的最大期望回报 | 贝尔曼最优方程 (for Q∗Q^*Q∗) |
值函数
下面我们用一个机器人在 5×55×55×5 网格地图上进行路径规划的经典例子,详细说明 状态值函数(State−ValueFunctionState-Value FunctionState−ValueFunction) 和 动作值函数(Action−ValueFunction/QAction-Value Function / QAction−ValueFunction/Q 函数) 的含义、计算方式以及它们在强化学习中的作用。
例子设定
- 网格大小:5×55×55×5,坐标范围是 (0,0)(0, 0)(0,0) 到 (4,4)(4, 4)(4,4)
- 起点:s0=(0,0)s_0 = (0, 0)s0=(0,0)
- 终点:sgoal=(4,4)s_{\text{goal}} = (4, 4)sgoal=(4,4)
- 移动方向:机器人可以向四个方向移动:{上、下、左、右}\{上、下、左、右\}{上、下、左、右}(假设无对角移动)
- 奖励机制:
- 每次移动消耗能量 → 奖励为负值(如 −1-1−1)
- 到达终点奖励 +10+10+10
- 折扣因子:γ=0.9\gamma = 0.9γ=0.9
- 转移概率: P(s′∣s,a)P(s' \mid s, a)P(s′∣s,a):在状态 sss 执行动作 aaa 后转移到 s′s's′ 的概率;
注意:这是一个典型的 MDPMDPMDP(马尔可夫决策过程),每个格子是一个“状态”,每次移动是一个“动作”。
状态值函数Vπ(s)V^{\pi}(s)Vπ(s)
Vπ(s)=Eπ[∑t=0∞γtR(st,at)∣s0=s]V^{\pi}(s) = \mathbb{E}_{\pi} \left[ \sum_{t=0}^{\infty} \gamma^t R(s_t, a_t) \mid s_0 = s \right] Vπ(s)=Eπ[t=0∑∞γtR(st,at)∣s0=s]
表示从状态 sss 开始,按照策略 π\piπ 行动,未来所有折扣回报的期望。是一个状态到回报值的映射
1. 策略设定
首先假设一种策略π{\pi}π,看在这种策略设定下,状态值函数VVV的值是多少。假设策略是“总是向右走,直到不能走,然后向下”,比如:
- 在状态(0,0)(0,0)(0,0):执行动作向右 → (0,1)(0, 1)(0,1)
- 在状态(0,1)(0,1)(0,1):执行动作向右 → (0,2)(0, 2)(0,2)
- … …
- 在状态(0,4)(0,4)(0,4):执行动作向下 → (1,4)(1, 4)(1,4)
- 在状态(1,4)(1,4)(1,4):执行动作向下 → (2,4)(2, 4)(2,4)
- … …
2. MDP中的随机性分析
MDP允许以下三种随机性来源:
| 随机性来源 | 说明 |
|---|---|
| 1. 策略随机性 | 策略 π(a)\pi(a)π(a),如上面的例子,具体的执行方向符合一定的概率分布 |
| 2. 状态转移随机性 | 动作执行后,下一个状态 s′s's′ 可能不确定(如打滑), 比如执行向右后并不一定真的移动到右边格子 |
| 3. 奖励随机性 | 即使在相同 (s,a,s′)(s, a, s')(s,a,s′) 下,奖励 RRR 也可能不同(如带噪声) |
只要存在任意一种随机性,未来轨迹(参考这里定义的MDP的轨迹,以及同随机过程中的轨迹的区别)就不是唯一的,回报就不是一个固定值,而是一个随机变量。用 期望 来描述“平均能获得多少回报”。
在上述机器人轨迹规划的例子中,如果对上述的随机性做一些限制,则能更明显的说明公式含义,因此,我们有如下简化假设:
- 策略是确定性的:比如在状态sss执行动作aaa后,就一定能到达aaa,即 π(a∣s)=1\pi(a|s) = 1π(a∣s)=1 对某个动作 aaa
- 转移是确定性的:执行动作后,机器人一定到达目标格子(无打滑)
- 奖励是确定性的:每步 −1-1−1,终点 +10+10+10
- 上述假设和公式的完整形式仅仅相差一个期望 EEE
- 当基于上述假设时,环境和策略都是确定性的,所以所有可能轨迹只有一条,期望就退化为该轨迹的折扣回报总和。
3. 计算特定状态下的状态值函数的具体数值。计算s=(0,0)s=(0,0)s=(0,0)时的状态值函数Vπ((0,0))V^{\pi}((0,0))Vπ((0,0))
依照设定的策略进行行走时,状态变化为:
(0,0)→(0,1)→(0,2)→(0,3)→(0,4)→(1,4)→(2,4)→(3,4)→(4,4)(0,0) \to (0,1) \to (0,2) \to (0,3) \to (0,4) \to (1,4) \to (2,4) \to (3,4) \to (4,4) (0,0)→(0,1)→(0,2)→(0,3)→(0,4)→(1,4)→(2,4)→(3,4)→(4,4)
共 8 步,每步奖励 -1,最后一步 +10(到达终点),依据公式可以求得折扣回报
Vπ((0,0))=(−1)⋅γ0+(−1)⋅γ1+⋯+(−1)⋅γ6+10⋅γ7V^\pi((0,0)) = (-1) \cdot \gamma^0 + (-1) \cdot \gamma^1 + \cdots + (-1) \cdot \gamma^6 + 10 \cdot \gamma^7 Vπ((0,0))=(−1)⋅γ0+(−1)⋅γ1+⋯+(−1)⋅γ6+10⋅γ7=−∑k=06γk+10⋅γ7= -\sum_{k=0}^{6} \gamma^k + 10 \cdot \gamma^7 =−k=0∑6γk+10⋅γ7代入 γ=0.9\gamma = 0.9γ=0.9:
- ∑k=060.9k≈1−0.971−0.9≈1−0.4780.1=5.22\sum_{k=0}^{6} 0.9^k \approx \frac{1 - 0.9^7}{1 - 0.9} \approx \frac{1 - 0.478}{0.1} = 5.22∑k=060.9k≈1−0.91−0.97≈0.11−0.478=5.22
- 10⋅0.97≈10⋅0.478=4.7810\cdot 0.9^7 \approx 10 \cdot 0.478 = 4.7810⋅0.97≈10⋅0.478=4.78
所以:
Vπ((0,0))≈−5.22+4.78=−0.44V^\pi((0,0)) \approx -5.22 + 4.78 = -0.44 Vπ((0,0))≈−5.22+4.78=−0.44
- 每个状态下的值函数
依据上述公式的计算流程,我们可以计算(0, 0)到(4, 4)每个状态下的状态值函数的具体数值。
| i\j | 0 | 1 | 2 | 3 | 4 |
|---|---|---|---|---|---|
| 0 | -0.434 | 0.628 | 1.810 | 3.122 | 4.580 |
| 1 | 0.628 | 1.810 | 3.122 | 4.580 | 6.200 |
| 2 | 1.810 | 3.122 | 4.580 | 6.200 | 8.000 |
| 3 | 3.122 | 4.580 | 6.200 | 8.000 | 10.000 |
| 4 | 4.580 | 6.200 | 8.000 | 10.000 | 0.000 |
状态值函数的本质是:在给定策略下,从状态 s 出发,所有可能轨迹的折扣回报的期望
动作值函数 Qπ(s,a)Q^{\pi}(s, a)Qπ(s,a)
Qπ(s,a)=Eπ[∑t=0∞γtR(st,at)∣s0=s,a0=a]Q^{\pi}(s, a) = \mathbb{E}_{\pi} \left[ \sum_{t=0}^{\infty} \gamma^t R(s_t, a_t) \mid s_0 = s, a_0 = a \right] Qπ(s,a)=Eπ[t=0∑∞γtR(st,at)∣s0=s,a0=a]
表示从状态 sss 开始,首先执行动作 aaa,之后按照策略 π\piπ 继续行动,所能获得的期望折扣回报
在上述5X55X55X5网格的例子中,策略和环境均是确定性的,上式等价于:
Qπ(s,a)=R(s,a,s′)+γVπ(s′)Q^{\pi}(s, a) = R(s, a, s') + \gamma V^{\pi}(s') Qπ(s,a)=R(s,a,s′)+γVπ(s′)
- 从状态 sss 执行动作 aaa 后,立即获得的奖励 R(s,a,s′)R(s, a, s')R(s,a,s′);
- 加上折扣因子 γ\gammaγ 乘以下一状态 s′s's′ 下的状态值函数 Vπ(s′)V^\pi(s')Vπ(s′),即后续所有期望回报的折现
示例 1:计算 Qπ((0,0),Right)Q^\pi((0,0), \text{Right})Qπ((0,0),Right)
- 当前状态:(0,0)(0,0)(0,0)
- 动作:RightRightRight → 下一状态:(0,1)(0,1)(0,1)
- 即时奖励:R=−1R = -1R=−1
- Vπ((0,1))=0.628V^\pi((0,1)) = 0.628Vπ((0,1))=0.628 (由前面的表得出)
- γ=0.9\gamma = 0.9γ=0.9
Qπ((0,0),Right)=(−1)+0.9⋅0.628=−1+0.5652=−0.4348Q^\pi((0,0), \text{Right}) = (-1) + 0.9 \cdot 0.628 = -1 + 0.5652 = \boxed{-0.4348} Qπ((0,0),Right)=(−1)+0.9⋅0.628=−1+0.5652=−0.4348
示例 2:计算 Qπ((0,0),Down)Q^\pi((0,0), \text{Down})Qπ((0,0),Down)
- 当前状态:(0,0)(0,0)(0,0)
- 动作:DownDownDown → 下一状态:(1,0)(1,0)(1,0)
- Vπ((1,0))=0.628V^\pi((1,0)) = 0.628Vπ((1,0))=0.628
- R=−1R = -1R=−1
Qπ((0,0),Down)=(−1)+0.9⋅0.628=−1+0.5652=−0.4348Q^\pi((0,0), \text{Down}) = (-1) + 0.9 \cdot 0.628 = -1 + 0.5652 = \boxed{-0.4348} Qπ((0,0),Down)=(−1)+0.9⋅0.628=−1+0.5652=−0.4348
示例 3:计算 Qπ((0,0),Up)Q^\pi((0,0), \text{Up})Qπ((0,0),Up)
- 当前状态:(0,0)(0,0)(0,0)
- 动作 Up:越界 → 无法移动 → 仍停留在 (0,0)(0,0)(0,0)
- 即时奖励:−1-1−1
- 下一状态:(0,0)(0,0)(0,0)
- Vπ((0,0))=−0.434V^\pi((0,0)) = -0.434Vπ((0,0))=−0.434
Qπ((0,0),Up)=(−1)+0.9⋅(−0.434)=−1−0.3906=−1.3906Q^\pi((0,0), \text{Up}) = (-1) + 0.9 \cdot (-0.434) = -1 - 0.3906 = \boxed{-1.3906} Qπ((0,0),Up)=(−1)+0.9⋅(−0.434)=−1−0.3906=−1.3906
❌ 这个动作明显更差!
二者比较
-
状态值函数 Vπ(s)V^\pi(s)Vπ(s):
- “我现在在状态 sss,我按照策略 π\piπ 走下去,平均能得多少分?”
- 评价“这个状态有多好”。
-
动作值函数 Qπ(s,a)Q^\pi(s, a)Qπ(s,a):
- “我现在在状态 sss,如果我先做动作 aaa,然后继续按策略走,平均能得多少分?”
- 评价“这个动作在当前状态下的好坏”。
| 不同点 | 状态值函数 Vπ(s)V^\pi(s)Vπ(s) | 动作值函数 Qπ(s,a)Q^\pi(s, a)Qπ(s,a) |
|---|---|---|
| 🚀 输入参数 | 只依赖于状态 sss | 依赖于状态 sss 和动作 aaa |
| 🎯 用途 | 评估“处于某个状态”的价值 | 评估“在某个状态执行某个动作”的价值 |
| 💡 决策依据 | 不能直接指导动作选择,需结合策略 | 可直接用于动作选择(如 argmaxaQ(s,a)\arg\max_a Q(s, a)argmaxaQ(s,a)) |
| 🤝 与策略的关系 | Vπ(s)=∑aπ(a∣s)Qπ(s,a)V^\pi(s) = \sum_a \pi(a \mid s) Q^\pi(s, a)Vπ(s)=∑aπ(a∣s)Qπ(s,a) | Qπ(s,a)Q^\pi(s, a)Qπ(s,a) |
| ⚙️ 计算方式 | 通过对动作取期望得到:Vπ(s)=∑aπ(a∣s)Qπ(s,a)V^\pi(s) = \sum_a \pi(a \mid s) Q^\pi(s, a)Vπ(s)=∑aπ(a∣s)Qπ(s,a) | Qπ(s,a)Q^\pi(s, a)Qπ(s,a) |
| 🏆 最优性表达 | 最优状态值函数:V∗(s)=maxπVπ(s)V^*(s) = \max_\pi V^\pi(s)V∗(s)=maxπVπ(s) | 最优动作值函数:Q∗(s,a)=maxπQπ(s,a)Q^*(s, a) = \max_\pi Q^\pi(s, a)Q∗(s,a)=maxπQπ(s,a),且可以直接用于最优策略提取 |
贝尔曼函数
贝尔曼方程(BellmanEquationBellman EquationBellmanEquation)是强化学习(ReinforcementLearning,RLReinforcement Learning, RLReinforcementLearning,RL)中的核心概念,用于描述值函数(valuefunctionvalue functionvaluefunction)的递归结构。它将当前状态(或状态-动作对)的价值与其后续状态(或动作)的价值联系起来,体现了动态规划中最优子结构(optimalsubstructureoptimal substructureoptimalsubstructure)的思想。
动态规划的两个核心特征:重叠子问题和最优子结构
如果对动态规划不太熟悉,强烈建议详细观看教程:
- 递归的思想
- 动态规划的思想
- 动态规划的具体例子
在强化学习中,有两个关键的贝尔曼方程:贝尔曼期望方程和贝尔曼最优方程。
贝尔曼期望函数(Bellman Expectation Equation)
这是针对给定策略(policy)下的值函数的递归关系,用于评估一个策略的好坏。
状态值函数 (State−valuefunctionState-value functionState−valuefunction) 的贝尔曼期望方程
状态值函数 Vπ(s)V^{\pi}(s)Vπ(s) 表示在策略 π\piπ 下,从状态 sss 开始,未来累积回报的期望值。
其贝尔曼期望方程为:
Vπ(s)=∑aπ(a∣s)∑s′,rp(s′,r∣s,a)[r+γVπ(s′)]V^{\pi}(s) = \sum_{a} \pi(a|s) \sum_{s',r} p(s',r|s,a) \left[ r + \gamma V^{\pi}(s') \right] Vπ(s)=a∑π(a∣s)s′,r∑p(s′,r∣s,a)[r+γVπ(s′)]
- π(a∣s)\pi(a|s)π(a∣s): 策略 π\piπ 在状态 sss 下选择动作 aaa 的概率;
- p(s′,r∣s,a)p(s',r|s,a)p(s′,r∣s,a): 环境的动态模型,即在状态 sss 执行动作 aaa 后,转移到状态 s′s's′ 并获得奖励 rrr 的概率;
- γ\gammaγ: 折扣因子(0≤γ≤10 \leq \gamma \leq 10≤γ≤1)
动作值函数 (Action−valuefunctionAction-value functionAction−valuefunction) 的贝尔曼期望方程
动作值函数 Qπ(s,a)Q^{\pi}(s,a)Qπ(s,a) 表示在策略 π\piπ 下,从状态 sss 执行动作 aaa 后,未来累积回报的期望值。
其贝尔曼期望方程为:
Qπ(s,a)=∑s′,rp(s′,r∣s,a)[r+γ∑a′π(a′∣s′)Qπ(s′,a′)]Q^{\pi}(s,a) = \sum_{s',r} p(s',r|s,a) \left[ r + \gamma \sum_{a'} \pi(a'|s') Q^{\pi}(s',a') \right] Qπ(s,a)=s′,r∑p(s′,r∣s,a)[r+γa′∑π(a′∣s′)Qπ(s′,a′)]
或等价地:
Qπ(s,a)=∑s′,rp(s′,r∣s,a)[r+γVπ(s′)]Q^{\pi}(s,a) = \sum_{s',r} p(s',r|s,a) \left[ r + \gamma V^{\pi}(s') \right] Qπ(s,a)=s′,r∑p(s′,r∣s,a)[r+γVπ(s′)]
- Qπ(s,a)Q^{\pi}(s,a)Qπ(s,a): 在策略 π\piπ 下,在状态 sss 情况下,执行动作 aaa 的期望回报;
- p(s′,r∣s,a)p(s',r|s,a)p(s′,r∣s,a): 状态转移与奖励的概率分布;
- γ\gammaγ: 折扣因子;
- π(a′∣s′)\pi(a'|s')π(a′∣s′): 在新状态 s′s's′ 下选择动作 a′a'a′ 的概率
贝尔曼最优函数 (BellmanOptimalityEquationBellman Optimality EquationBellmanOptimalityEquation)
贝尔曼最优方程描述的是最优策略(optimalpolicyoptimal policyoptimalpolicy)下的值函数,即所有策略中能达到的最大值。
最优状态值函数 (OptimalState−valueFunctionOptimal State-value FunctionOptimalState−valueFunction)
V∗(s)=maxa∑s′,rp(s′,r∣s,a)[r+γV∗(s′)]V^*(s) = \max_{a} \sum_{s',r} p(s',r|s,a) \left[ r + \gamma V^*(s') \right] V∗(s)=amaxs′,r∑p(s′,r∣s,a)[r+γV∗(s′)]
最优动作值函数 (OptimalAction−valueFunctionOptimal Action-value FunctionOptimalAction−valueFunction)
Q∗(s,a)=∑s′,rp(s′,r∣s,a)[r+γmaxa′Q∗(s′,a′)]Q^*(s,a) = \sum_{s',r} p(s',r|s,a) \left[ r + \gamma \max_{a'} Q^*(s',a') \right] Q∗(s,a)=s′,r∑p(s′,r∣s,a)[r+γa′maxQ∗(s′,a′)]这些方程不依赖于某个具体策略,而是直接寻找最优动作,体现了最优控制的思想。
关系
与状态值函数、动作值函数的关系总结
| 概念 | 定义 | 对应贝尔曼方程 |
|---|---|---|
| 状态值函数 Vπ(s)V^{\pi}(s)Vπ(s) | 策略 π\piπ 下从状态 sss 开始的期望回报 | 贝尔曼期望方程 (for VπV^{\pi}Vπ) |
| 动作值函数 Qπ(s,a)Q^{\pi}(s,a)Qπ(s,a) | 策略 π\piπ 下在 sss 采取 aaa 后的期望回报 | 贝尔曼期望方程 (for QπQ^{\pi}Qπ) |
| 最优状态值函数 V∗(s)V^*(s)V∗(s) | 所有策略中从 sss 开始的最大期望回报 | 贝尔曼最优方程 (for V∗V^*V∗) |
| 最优动作值函数 Q∗(s,a)Q^*(s,a)Q∗(s,a) | 所有策略中在 sss 采取 aaa 后的最大期望回报 | 贝尔曼最优方程 (for Q∗Q^*Q∗) |
- 贝尔曼期望方程:告诉我们“如果我按某个策略走,现在在这个状态/动作值多少”。
- 贝尔曼最优方程:告诉我们“如果我总是做最好的选择,现在在这个状态/动作最多能值多少”。
它们是动态规划、价值迭代、策略迭代、Q-learning、SARSA 等算法的理论基础。
如何求解贝尔曼最优函数
继续基于前面的内容,深入讲解如何求解贝尔曼最优方程。在环境模型(即状态转移概率 p(s′,r∣s,a)p(s', r|s, a)p(s′,r∣s,a))和奖励函数已知的前提下,我们可以使用动态规划(Dynamic Programming, DP)方法来求解最优策略。
动态规划是强化学习中用于规划(planning)的一类经典方法,它依赖于完全已知的环境模型,通过迭代更新值函数来逼近最优解。
值迭代与策略迭代:理论部分
1. 共同前提
- 环境是有限马尔可夫决策过程(Finite MDP);
- 状态空间 S\mathcal{S}S、动作空间 A\mathcal{A}A 有限;
- 转移概率 p(s′,r∣s,a)p(s', r|s, a)p(s′,r∣s,a) 和奖励函数 r(s,a,s′)r(s, a, s')r(s,a,s′) 已知;
- 折扣因子 γ∈[0,1)\gamma \in [0, 1)γ∈[0,1)(通常取 0.9 或 0.99)。
目标:求出最优状态值函数 V∗(s)V^*(s)V∗(s) 或最优动作值函数 Q∗(s,a)Q^*(s, a)Q∗(s,a),从而导出最优策略 π\piπ
2. 值迭代
核心思想:直接对贝尔曼最优方程进行迭代逼近,不显式维护策略。
算法步骤:
-
初始化:对所有状态 sss,设 V0(s)=0V_0(s) = 0V0(s)=0(或其他任意值)。
-
迭代更新(对每个 k=0,1,2,…k = 0, 1, 2, \ldotsk=0,1,2,…):
Vk+1(s)←maxa∑s′,rp(s′,r∣s,a)[r+γVk(s′)],∀s∈SV_{k+1}(s) \leftarrow \max_a \sum_{s', r} p(s', r|s, a) \left[ r + \gamma V_k(s') \right], \quad \forall s \in \mathcal{S} Vk+1(s)←amaxs′,r∑p(s′,r∣s,a)[r+γVk(s′)],∀s∈S -
重复直到收敛(即 ∥Vk+1−Vk∥∞<ϵ\|V_{k+1} - V_k\|_\infty < \epsilon∥Vk+1−Vk∥∞<ϵ)。
-
最优策略由最终的 V∗V^*V∗ 导出:
π∗(s)=argmaxa∑s′,rp(s′,r∣s,a)[r+γV∗(s′)]\pi^*(s) = \arg\max_a \sum_{s', r} p(s', r|s, a) \left[ r + \gamma V^*(s') \right] π∗(s)=argamaxs′,r∑p(s′,r∣s,a)[r+γV∗(s′)] -
特点:
- 每次迭代都“贪心地”选择当前最优动作;
- 收敛速度快(理论上以几何速率收敛);
- 不需要显式策略,但最后一步需提取策略。
3. 策略迭代
核心思想:交替进行 策略评估(Policy Evaluation)和 策略改进(Policy Improvement),直到策略不再变化。
算法步骤:
-
初始化:任意策略 π0\pi_0π0
-
重复以下两步直到收敛:
- 策略评估:给定当前策略 π\piπ,求解其状态值函数 Vπ(s)V^\pi(s)Vπ(s),即解贝尔曼期望方程:
Vπ(s)=∑aπ(a∣s)∑s′,rp(s′,r∣s,a)[r+γVπ(s′)]V^\pi(s) = \sum_a \pi(a|s) \sum_{s', r} p(s', r|s, a) \left[ r + \gamma V^\pi(s') \right] Vπ(s)=a∑π(a∣s)s′,r∑p(s′,r∣s,a)[r+γVπ(s′)]
通常通过迭代(类似值迭代但固定策略)或直接解线性方程组实现。 - 策略改进:
基于当前 VπV^\piVπ,构造一个更优(或相等)的确定性策略:
πnew(s)=argmaxa∑s′,rp(s′,r∣s,a)[r+γVπ(s′)]\pi_{\text{new}}(s) = \arg\max_a \sum_{s', r} p(s', r|s, a) \left[ r + \gamma V^\pi(s') \right] πnew(s)=argamaxs′,r∑p(s′,r∣s,a)[r+γVπ(s′)]
- 策略评估:给定当前策略 π\piπ,求解其状态值函数 Vπ(s)V^\pi(s)Vπ(s),即解贝尔曼期望方程:
-
终止条件:当 πnew=π\pi_{\text{new}} = \piπnew=π 时,π\piπ 即为最优策略 π∗\pi^*π∗
-
特点:
- 每次策略改进都严格提升(或保持)性能;
- 通常比值迭代迭代次数少,但每次迭代计算量更大(需完整策略评估);
- 保证在有限步内收敛到最优策略。
值迭代与策略迭代:案例实践
问题定义回顾
-
网格大小:5×55 \times 55×5,状态坐标为 (i,j)(i, j)(i,j),其中 i,j∈{0,1,2,3,4}i, j \in \{0, 1, 2, 3, 4\}i,j∈{0,1,2,3,4}
-
起点:(0,0)(0, 0)(0,0),终点(目标状态):(4,4)(4, 4)(4,4)
-
动作空间:A={up,down,left,right}A = \{\text{up}, \text{down}, \text{left}, \text{right}\}A={up,down,left,right}
-
环境动态:状态转移是确定性的
- 执行动作后,若新位置在网格内,则移动;
- 若出界(如从 (0,0)(0,0)(0,0) 向上或向左),则停留在原地。
-
奖励函数:
- 每执行一个动作(无论是否移动):立即奖励 = -1
- 仅当到达 (4,4)(4,4)(4,4) 时:该步奖励为 +10(注意:是在进入 (4,4)(4,4)(4,4) 的那一步获得 +10)
- 一旦到达 (4,4)(4,4)(4,4),过程终止(后续无动作,无奖励)
-
折扣因子:γ=0.9\gamma = 0.9γ=0.9
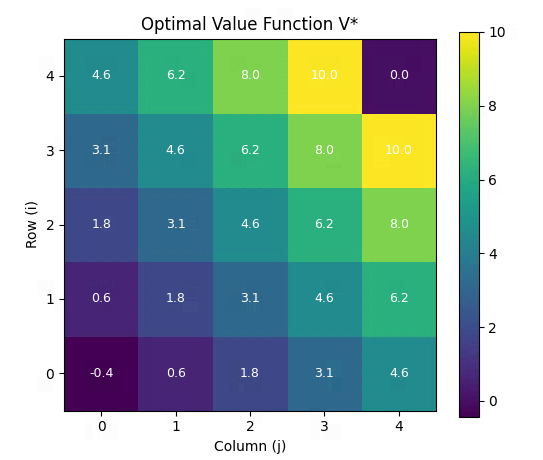
值迭代(及python实现)
- 目标:通过值迭代求解最优状态值函数 V∗(s)V^*(s)V∗(s)
- 奖励公式:奖励是在执行动作后、转移到新状态时获得的。因此,从状态 sss 执行动作 aaa 转移到 s′s's′,获得的奖励为:
r={10,if s′=(4,4)−1,otherwiser = \begin{cases} 10, & \text{if } s' = (4,4) \\ -1, & \text{otherwise} \end{cases} r={10,−1,if s′=(4,4)otherwise - 值迭代公式(确定性环境简化)。由于环境是确定性的,转移概率退化为:
s′=next(s,a)s' = \text{next}(s, a) s′=next(s,a)
所以贝尔曼最优方程简化为:
Vk+1(s)=maxa∈A[r(s,a)+γVk(s′)]V_{k+1}(s) = \max_{a \in A} \left[ r(s, a) + \gamma V_k(s') \right] Vk+1(s)=a∈Amax[r(s,a)+γVk(s′)]其中:- s′=next(s,a)s' = \text{next}(s, a)s′=next(s,a)
- r(s,a)={10,if s′=(4,4)−1,otherwiser(s, a) = \begin{cases} 10, & \text{if } s' = (4,4) \\ -1, & \text{otherwise} \end{cases}r(s,a)={10,−1,if s′=(4,4)otherwise
- 计算步骤
- 🔷 步骤 1:初始化 V0(s)V_0(s)V0(s)。通常初始化为全 0(也可任意):
V0(s)=0for all s∈gridV_0(s) = 0 \quad \text{for all } s \in \text{grid} V0(s)=0for all s∈grid
特别地,终点 (4,4)(4,4)(4,4) 是终止状态,我们约定:
Vk((4,4))=0for all kV_k((4,4)) = 0 \quad \text{for all } k Vk((4,4))=0for all k
| i\j | 0 | 1 | 2 | 3 | 4 |
|---|---|---|---|---|---|
| 0 | 0 | 0 | 0 | 0 | 0 |
| 1 | 0 | 0 | 0 | 0 | 0 |
| 2 | 0 | 0 | 0 | 0 | 0 |
| 3 | 0 | 0 | 0 | 0 | 0 |
| 4 | 0 | 0 | 0 | 0 | 0 |
这里的V0(s)V_0(s)V0(s)是一个函数,是从状态s=(i,j)s=(i,j)s=(i,j)到值VVV的映射。
角标000表示 k=0k=0k=0 次迭代
- 🔷 步骤 2:第一次迭代 —— 计算 V1(s)V_1(s)V1(s)
我们要对每个非终点状态 s≠(4,4)s \neq (4,4)s=(4,4) 计算:
V1(s)=maxa[r(s,a)+γ⋅V0(s′)]=maxa[r(s,a)+0.9⋅0]=maxar(s,a)V_1(s) = \max_a \left[ r(s,a) + \gamma \cdot V_0(s') \right] = \max_a \left[ r(s,a) + 0.9 \cdot 0 \right] = \max_a r(s,a) V1(s)=amax[r(s,a)+γ⋅V0(s′)]=amax[r(s,a)+0.9⋅0]=amaxr(s,a)因为 V0(s′)=0V_0(s') = 0V0(s′)=0 对所有 s′s's′,所以 V1(s)V_1(s)V1(s) 就等于从 sss 出发能获得的最大即时奖励, 当某个动作 aaa 能让智能体直接进入 (4,4)(4,4)(4,4) 时,r(s,a)=10r(s,a) = 10r(s,a)=10,否则,所有动作的奖励都是 -1
显然,只有两个邻居能一步到达 (4,4)(4,4)(4,4):- 从 (3,4)(3,4)(3,4) 向下 → (4,4)(4,4)(4,4)
- 从 (4,3)(4,3)(4,3) 向右 → (4,4)(4,4)(4,4)
所以: - V1(3,4)=maxar=10V_1(3,4) = \max_a r = 10V1(3,4)=maxar=10(选择 “downdowndown”)
- V1(4,3)=maxar=10V_1(4,3) = \max_a r = 10V1(4,3)=maxar=10(选择 “rightrightright”)
其他所有状态,无论怎么走,都无法在一步内到达 (4,4)(4,4)(4,4),所以它们的所有动作奖励都是 −1-1−1,因此:对于这些状态,V1(s)=maxar(s,a)=−1V_1(s) = \max_a r(s,a) = -1V1(s)=maxar(s,a)=−1
| i\j | 0 | 1 | 2 | 3 | 4 |
|---|---|---|---|---|---|
| 0 | -1 | -1 | -1 | -1 | -1 |
| 1 | -1 | -1 | -1 | -1 | -1 |
| 2 | -1 | -1 | -1 | -1 | -1 |
| 3 | -1 | -1 | -1 | -1 | 10 |
| 4 | -1 | -1 | -1 | 10 | 0 |
- 🔷 步骤 3:第二次迭代 —— 计算 V2(s)V_2(s)V2(s)
逐类分析状态-
🟢 类型 1: 终点 (4,4) 保持: V2(4,4)=0V_2(4, 4) = 0V2(4,4)=0
-
🟢 类型 2: 能一步到终点的状态(V1V_1V1 中为 10)
-
对于状态(3,4): 向下 → (4,4), 奖励 = 10, 但注意:一旦到达 (4,4), 过程终止,所以:
V2(3,4)=10+0.9⋅V1(4,4)=10+0=10V_2(3,4) = 10 + 0.9 \cdot V_1(4, 4) = 10 + 0 = 10 V2(3,4)=10+0.9⋅V1(4,4)=10+0=10其他动作(如向上到 (2,4)(2,4)(2,4)):奖励=−1+0.9×(−1)=−1.9奖励 = -1 + 0.9 × (-1) = -1.9奖励=−1+0.9×(−1)=−1.9 ,所以仍选向下,V2(3,4)=10V_2(3, 4) = 10V2(3,4)=10 -
对于状态(4,3): 同理,V2(4,3)=10V_2(4, 3) = 10V2(4,3)=10
-
🟢 类型 3: 能一步到达“值为 10”的状态(即离终点两步)
这些状态的邻居包含 (3,4) 或 (4,3),所以可以间接获得高价值。 -
状态(2,4):
- down → (3,4), s′=(3,4)s' = (3, 4)s′=(3,4),不是终点 → 奖励 = -1
V2=−1+0.9⋅V1(3,4)=−1+0.9×10=−1+9=8V_2 = -1 + 0.9 \cdot V_1(3, 4) = -1 + 0.9 \times 10 = -1 + 9 = 8 V2=−1+0.9⋅V1(3,4)=−1+0.9×10=−1+9=8 - 其他动作(up→(1,4), left→(2,3)):V1=−1V_1 = -1V1=−1 →
V2=−1+0.9×(−1)=−1.9V_2= -1 + 0.9 \times (-1) = -1.9 V2=−1+0.9×(−1)=−1.9 - 最大值:V2(2,4)=8V_2(2, 4) = 8V2(2,4)=8
- down → (3,4), s′=(3,4)s' = (3, 4)s′=(3,4),不是终点 → 奖励 = -1
-
状态(3,3): 同理 V2(3,3)=8V_2(3, 3) = 8V2(3,3)=8
-
🟢 类型 4: 其他不能能一步到达“值为 10”的状态,如 (3,2), (2,3) 等(即离终点大于两步)
- 它们的邻居在 V1V_1V1 中都是 -1,所以最大 V2=−1+0.9×(−1)=−1.9V_2 = -1 + 0.9 \times (-1) = -1.9V2=−1+0.9×(−1)=−1.9
-
| i\j | 0 | 1 | 2 | 3 | 4 |
|---|---|---|---|---|---|
| 0 | -1.9 | -1.9 | -1.9 | -1.9 | -1.9 |
| 1 | -1.9 | -1.9 | -1.9 | -1.9 | -1.9 |
| 2 | -1.9 | -1.9 | -1.9 | -1.9 | 8 |
| 3 | -1.9 | -1.0 | -1.9 | 8 | 10 |
| 4 | -1.9 | -1.9 | 8 | 10 | 0 |
- python代码实现
基本实现
import numpy as np
import matplotlib.pyplot as plt# ----------------------------
# 环境参数
# ----------------------------
GRID_SIZE = 5
GOAL = (4, 4)
ACTIONS = ['up', 'down', 'left', 'right']
GAMMA = 0.9
REWARD_STEP = -1
REWARD_GOAL = 10
THRESHOLD = 1e-4 # 收敛阈值# ----------------------------
# 辅助函数:执行动作
# ----------------------------
def step(state, action):i, j = stateif action == 'up':i = max(0, i - 1)elif action == 'down':i = min(GRID_SIZE - 1, i + 1)elif action == 'left':j = max(0, j - 1)elif action == 'right':j = min(GRID_SIZE - 1, j + 1)next_state = (i, j)# 奖励:只有进入 GOAL 时为 +10,否则 -1reward = REWARD_GOAL if next_state == GOAL else REWARD_STEPreturn next_state, reward# ----------------------------
# 值迭代主函数
# ----------------------------
def value_iteration():# 初始化值函数V = np.zeros((GRID_SIZE, GRID_SIZE))V[GOAL] = 0 # 终止状态值为0(虽然后续不会更新它)iteration = 0while True:delta = 0V_old = V.copy()for i in range(GRID_SIZE):for j in range(GRID_SIZE):if (i, j) == GOAL:continue # 跳过终点v = V_old[i, j]# 计算所有动作的 Q 值q_values = []for a in ACTIONS:next_state, reward = step((i, j), a)ni, nj = next_stateq = reward + GAMMA * V_old[ni, nj]q_values.append(q)V[i, j] = max(q_values)delta = max(delta, abs(v - V[i, j]))iteration += 1print(f"Iteration {iteration}, max delta: {delta:.6f}")if delta < THRESHOLD:breakreturn V, iteration# ----------------------------
# 从 V 提取最优策略
# ----------------------------
def extract_policy(V):policy = np.empty((GRID_SIZE, GRID_SIZE), dtype='<U5')for i in range(GRID_SIZE):for j in range(GRID_SIZE):if (i, j) == GOAL:policy[i, j] = 'G'continueq_values = []for a in ACTIONS:next_state, reward = step((i, j), a)ni, nj = next_stateq = reward + GAMMA * V[ni, nj]q_values.append(q)best_action = ACTIONS[np.argmax(q_values)]policy[i, j] = best_actionreturn policy# ----------------------------
# 可视化函数
# ----------------------------
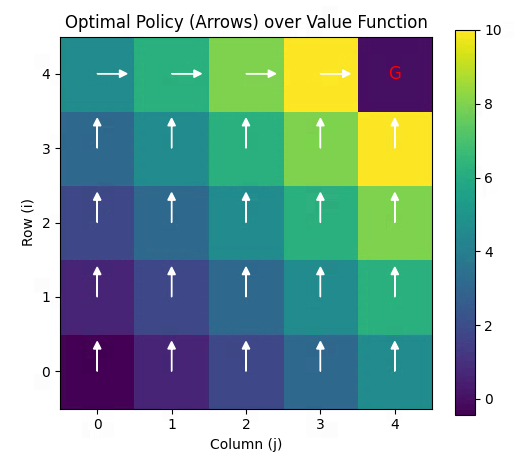
def plot_value_function(V, title="Value Function"):plt.figure(figsize=(6, 5))im = plt.imshow(V, cmap='viridis', origin='lower')plt.colorbar(im)plt.title(title)plt.xlabel('Column (j)')plt.ylabel('Row (i)')# 标注数值for i in range(GRID_SIZE):for j in range(GRID_SIZE):plt.text(j, i, f'{V[i, j]:.1f}', ha='center', va='center', color='white', fontsize=9)plt.show()def plot_policy(policy, V):plt.figure(figsize=(6, 5))plt.imshow(V, cmap='viridis', origin='lower')plt.colorbar()plt.title("Optimal Policy (Arrows) over Value Function")# 箭头方向映射arrow_map = {'up': (0, -0.3),'down': (0, 0.3),'left': (-0.3, 0),'right': (0.3, 0),'G': (0, 0)}for i in range(GRID_SIZE):for j in range(GRID_SIZE):if policy[i, j] == 'G':plt.text(j, i, 'G', ha='center', va='center', color='red', fontsize=12)else:dx, dy = arrow_map[policy[i, j]]plt.arrow(j, i, dx, dy, head_width=0.1, head_length=0.1, fc='white', ec='white')plt.xlabel('Column (j)')plt.ylabel('Row (i)')plt.show()# ----------------------------
# 主程序
# ----------------------------
if __name__ == "__main__":print("Running Value Iteration on 5x5 Grid...")V, n_iter = value_iteration()print(f"\nConverged in {n_iter} iterations.")# 打印最终值函数print("\nFinal Value Function V*:")print(np.round(V, 2))# 提取并可视化策略policy = extract_policy(V)print("\nOptimal Policy (U=up, D=down, L=left, R=right, G=goal):")policy_symbols = {'up': 'U', 'down': 'D', 'left': 'L', 'right': 'R', 'G': 'G'}policy_display = np.vectorize(policy_symbols.get)(policy)for row in policy_display:print(" ".join(row))# 可视化plot_value_function(V, "Optimal Value Function V*")plot_policy(policy, V)
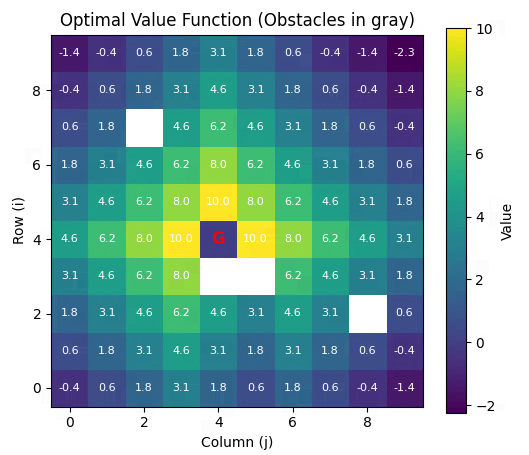
增加障碍物,并且状态空间增大到10*10
import numpy as np
import matplotlib.pyplot as plt# ----------------------------
# 环境参数
# ----------------------------
GRID_SIZE = 10
START = (0, 0)
GOAL = (4, 4)
# 定义障碍物坐标(可任意修改)
OBSTACLES = [(2, 8), (3, 4), (3, 5), (7,2)] # 示例:三个障碍物ACTIONS = ['up', 'down', 'left', 'right']
GAMMA = 0.9
REWARD_STEP = -1
REWARD_GOAL = 10
THRESHOLD = 1e-4# 转换障碍物为集合,便于快速查询
OBSTACLE_SET = set(OBSTACLES)# 检查是否为有效状态(非障碍物且在网格内)
def is_valid(state):i, j = stateif not (0 <= i < GRID_SIZE and 0 <= j < GRID_SIZE):return Falseif state in OBSTACLE_SET:return Falsereturn True# ----------------------------
# 辅助函数:执行动作(考虑障碍物)
# ----------------------------
def step(state, action):i, j = state# 先计算候选下一位置if action == 'up':ni, nj = i - 1, jelif action == 'down':ni, nj = i + 1, jelif action == 'left':ni, nj = i, j - 1elif action == 'right':ni, nj = i, j + 1else:raise ValueError("Invalid action")# 如果新位置无效(出界或障碍物),则停留在原地if not is_valid((ni, nj)):ni, nj = i, j # stay in placenext_state = (ni, nj)# 奖励:只有进入 GOAL 时为 +10,否则 -1# 注意:如果 next_state 是障碍物?不会发生,因为已处理reward = REWARD_GOAL if next_state == GOAL else REWARD_STEPreturn next_state, reward# ----------------------------
# 值迭代主函数
# ----------------------------
def value_iteration():V = np.zeros((GRID_SIZE, GRID_SIZE))# 初始化:障碍物和终点特殊处理for i in range(GRID_SIZE):for j in range(GRID_SIZE):if (i, j) == GOAL:V[i, j] = 0 # 终止状态elif (i, j) in OBSTACLE_SET:V[i, j] = 0 # 障碍物值设为0(不参与决策)iteration = 0while True:delta = 0V_old = V.copy()for i in range(GRID_SIZE):for j in range(GRID_SIZE):state = (i, j)# 跳过终点和障碍物if state == GOAL or state in OBSTACLE_SET:continuev = V_old[i, j]q_values = []for a in ACTIONS:next_state, reward = step(state, a)ni, nj = next_stateq = reward + GAMMA * V_old[ni, nj]q_values.append(q)V[i, j] = max(q_values)delta = max(delta, abs(v - V[i, j]))iteration += 1if iteration % 10 == 0 or delta < THRESHOLD:print(f"Iteration {iteration}, max delta: {delta:.6f}")if delta < THRESHOLD:breakreturn V, iteration# ----------------------------
# 提取最优策略
# ----------------------------
def extract_policy(V):policy = np.full((GRID_SIZE, GRID_SIZE), '', dtype='<U5')for i in range(GRID_SIZE):for j in range(GRID_SIZE):state = (i, j)if state == GOAL:policy[i, j] = 'G'elif state in OBSTACLE_SET:policy[i, j] = 'X'else:q_values = []for a in ACTIONS:next_state, reward = step(state, a)ni, nj = next_stateq = reward + GAMMA * V[ni, nj]q_values.append(q)best_action = ACTIONS[np.argmax(q_values)]policy[i, j] = best_actionreturn policy# ----------------------------
# 可视化函数
# ----------------------------
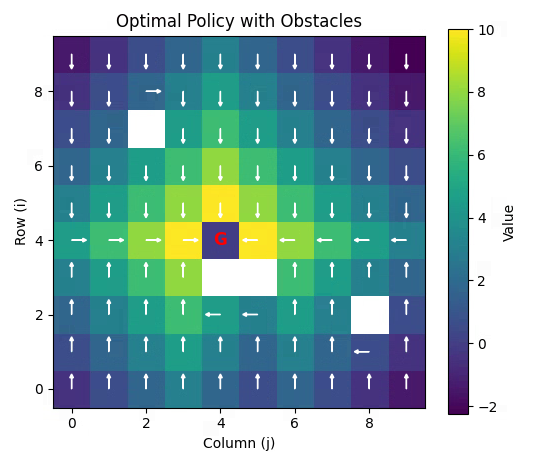
def plot_value_function(V):# 创建掩码:障碍物区域设为 NaN,不显示颜色V_plot = V.astype(float)for (i, j) in OBSTACLE_SET:V_plot[i, j] = np.nanV_plot[GOAL] = 0 # 终点值为0plt.figure(figsize=(6, 5))im = plt.imshow(V_plot, cmap='viridis', origin='lower')plt.colorbar(im, label='Value')plt.title("Optimal Value Function (Obstacles in gray)")plt.xlabel('Column (j)')plt.ylabel('Row (i)')# 标注数值和障碍物for i in range(GRID_SIZE):for j in range(GRID_SIZE):if (i, j) in OBSTACLE_SET:plt.text(j, i, 'X', ha='center', va='center', color='white', fontsize=12, weight='bold')elif (i, j) == GOAL:plt.text(j, i, 'G', ha='center', va='center', color='red', fontsize=12, weight='bold')else:plt.text(j, i, f'{V[i, j]:.1f}', ha='center', va='center', color='white', fontsize=8)plt.show()def plot_policy(policy, V):V_plot = V.astype(float)for (i, j) in OBSTACLE_SET:V_plot[i, j] = np.nanplt.figure(figsize=(6, 5))plt.imshow(V_plot, cmap='viridis', origin='lower')plt.colorbar(label='Value')plt.title("Optimal Policy with Obstacles")arrow_map = {'up': (0, -0.3),'down': (0, 0.3),'left': (-0.3, 0),'right': (0.3, 0)}for i in range(GRID_SIZE):for j in range(GRID_SIZE):if (i, j) in OBSTACLE_SET:plt.text(j, i, 'X', ha='center', va='center', color='white', fontsize=12, weight='bold')elif policy[i, j] == 'G':plt.text(j, i, 'G', ha='center', va='center', color='red', fontsize=12, weight='bold')elif policy[i, j] in arrow_map:dx, dy = arrow_map[policy[i, j]]plt.arrow(j, i, dx, dy, head_width=0.1, head_length=0.1, fc='white', ec='white')plt.xlabel('Column (j)')plt.ylabel('Row (i)')plt.show()# ----------------------------
# 主程序
# ----------------------------
if __name__ == "__main__":print("5x5 Grid World with Obstacles")print(f"Start: {START}, Goal: {GOAL}")print(f"Obstacles: {OBSTACLES}\n")V, n_iter = value_iteration()print(f"\nConverged in {n_iter} iterations.")policy = extract_policy(V)# 打印策略(文本)symbol_map = {'up': 'U', 'down': 'D', 'left': 'L', 'right': 'R', 'G': 'G', 'X': 'X'}policy_text = np.vectorize(symbol_map.get)(policy)print("\nOptimal Policy (U/D/L/R, G=goal, X=obstacle):")for row in policy_text:print(" ".join(f"{cell:>2}" for cell in row))# 可视化plot_value_function(V)plot_policy(policy, V)
策略迭代(及python实现)
肝不动了, 另起一篇…