《自动控制原理》第 3 章 线性控制系统的运动分析:3.4
3.4 控制系统运动的稳定性
分析控制系统的运动,首先要判定系统运动是否稳定。
- 只有稳定的运动才谈得上按预定规律变化和运动的品质问题。
- 而不稳定的运动根本就无法付诸于工程实现。
因此稳定性问题成为控制系统运动分析的首要问题,也是系统能够正常工作的首要条件。
一切形式的运动都存在稳定性问题。即使是最简单(也是特殊)的运动形式:静止,也存在稳定性问题。
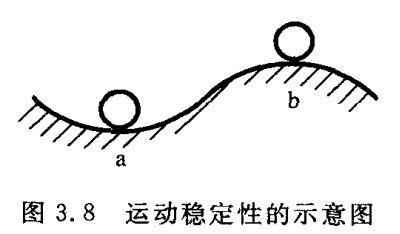
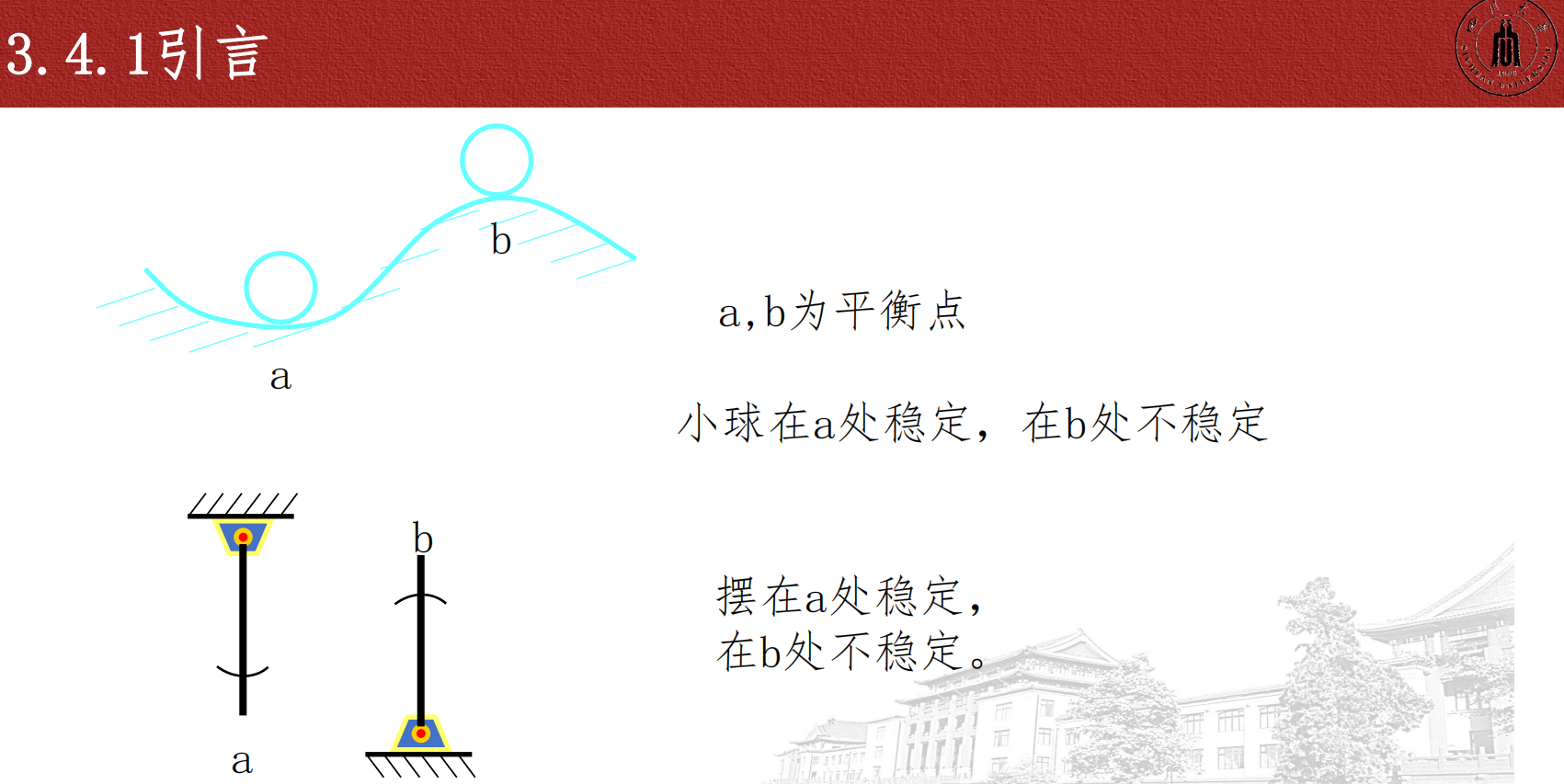
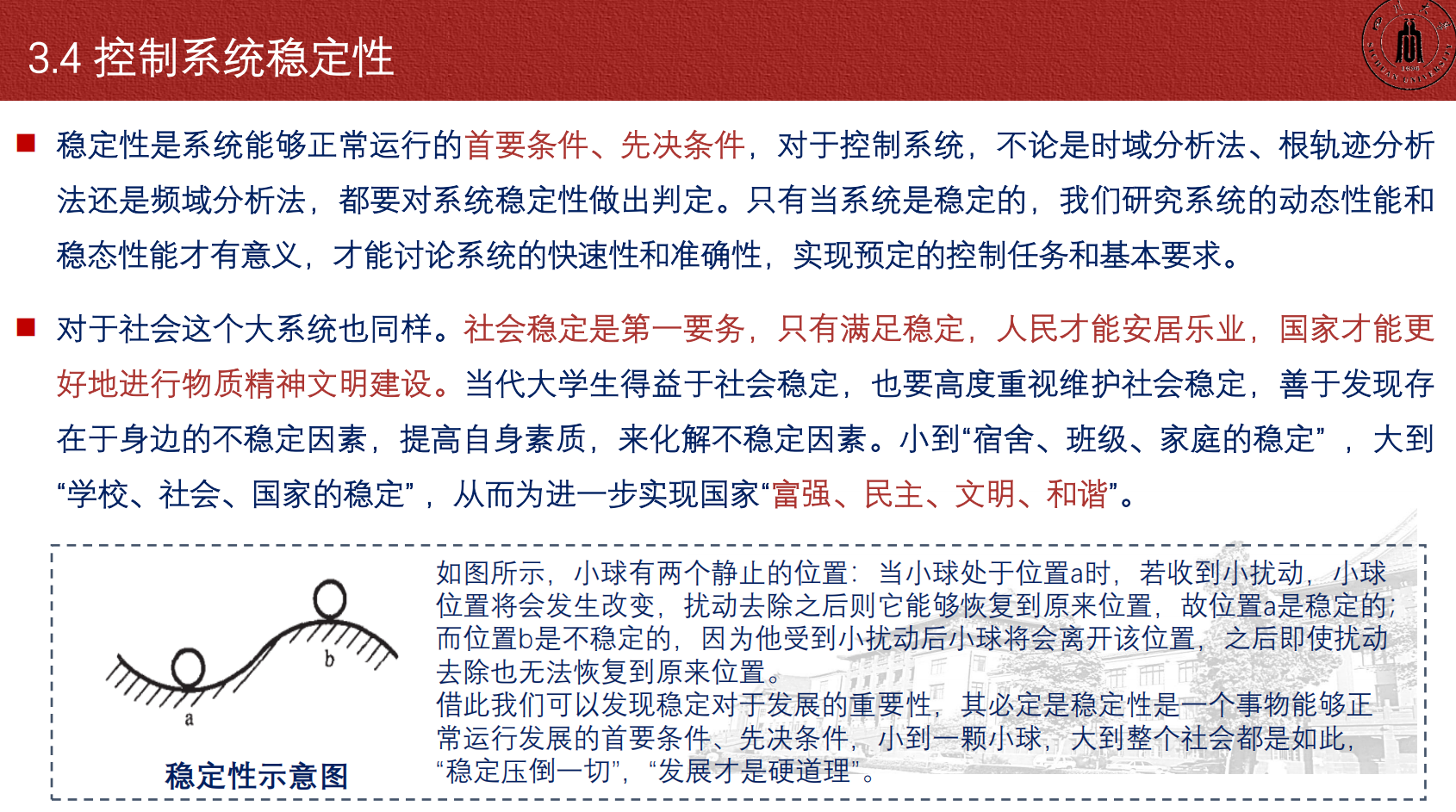
例如图3.8所示的小球,它有两个静止的位置:
- 当小球处于位置a时,若受到小扰动,小球的位置将发生变化,扰动去除后则它能够恢复到原来的位置,故位置a是稳定的;
- 而位置b是不稳定的,因为当它受到小扰动后,小球将离开位置b,扰动去除后再也无法恢复到原来的位置。
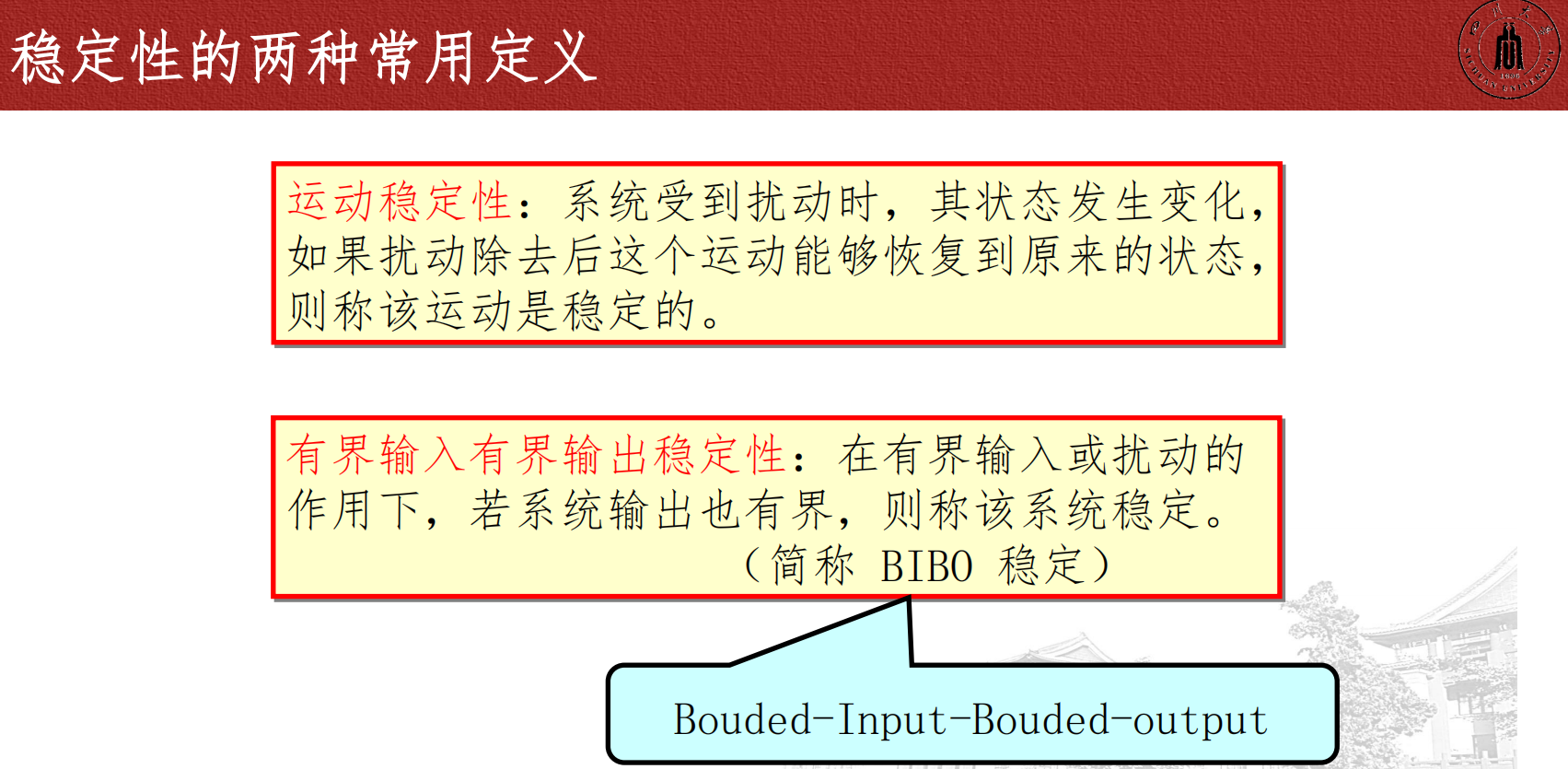
因此所谓运动的稳定性,简单地说,,指运动受到扰动时其状态将发生变化,如果扰动去除后这个运动能够恢复到原来的状态,则称该运动为稳定的,否则就是不稳定的。
控制系统运动的稳定性问题,是一个重要而又古老的问题。
针对不同的控制问题,提出了不同的稳定性概念,因而稳定性的定义有许多种。
前面已指出:对于一个控制系统,可以分别从它的内部特性和外部特性两个方面来考察其动态行为,从而控制系统有两种基本数学描述方法和相应的两类基本数学模型。
虽然稳定性有许多种定义方法,但在控制工程中通常也是分别从内部特性和外部特性两个方面来考察稳定性的。相应地可将系统的稳定性分为内部稳定性和外部稳定性。
在这一节里我们将以经典的李雅普诺夫稳定性理论为中心,介绍稳定性的定义和基本概念;
并以线性定常系统的稳定性理论为重点,介绍系统稳定性的条件和其直观的图形表示以及判断系统稳定性的简便方法——劳斯-赫尔维茨(Routh - Hurwitz)判据。
并导出线性系统稳定性与原非线性系统运动稳定性之间的关系,说明线性系统稳定性分析的实际意义;
同时介绍外部稳定性的定义、稳定的条件和判据及其与内部稳定性之间的关系。
3.4.1 内部稳定性
控制系统的内部稳定性是反映系统内部状态变化情况的一个重要特性。
也是本书讨论的一个主要内容。
下面将着重介绍,在稳定性分析中,最为重要且广被应用的李雅普诺夫方法,并从一般非线性系统出发建立稳定性的概念。然后应用这些概念来分析线性控制系统的稳定性。
而应用这些概念来分析非线性系统稳定性的内容,在第8和第10章介绍。
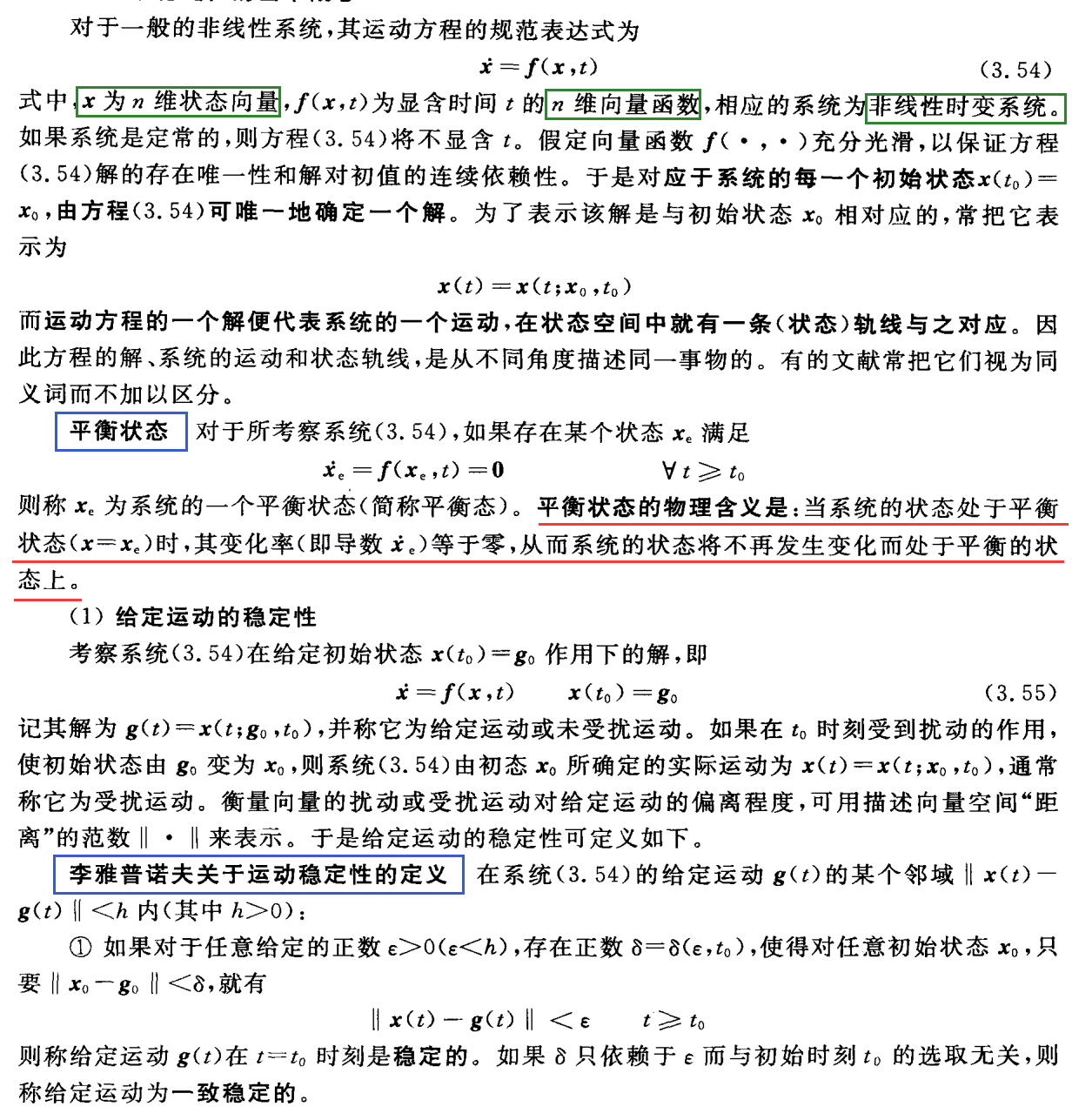
(1)运动稳定性的基本概念
……
(2)线性定常系统稳定性的条件
根据上述定义,我们来考察线性定常系统的稳定性。
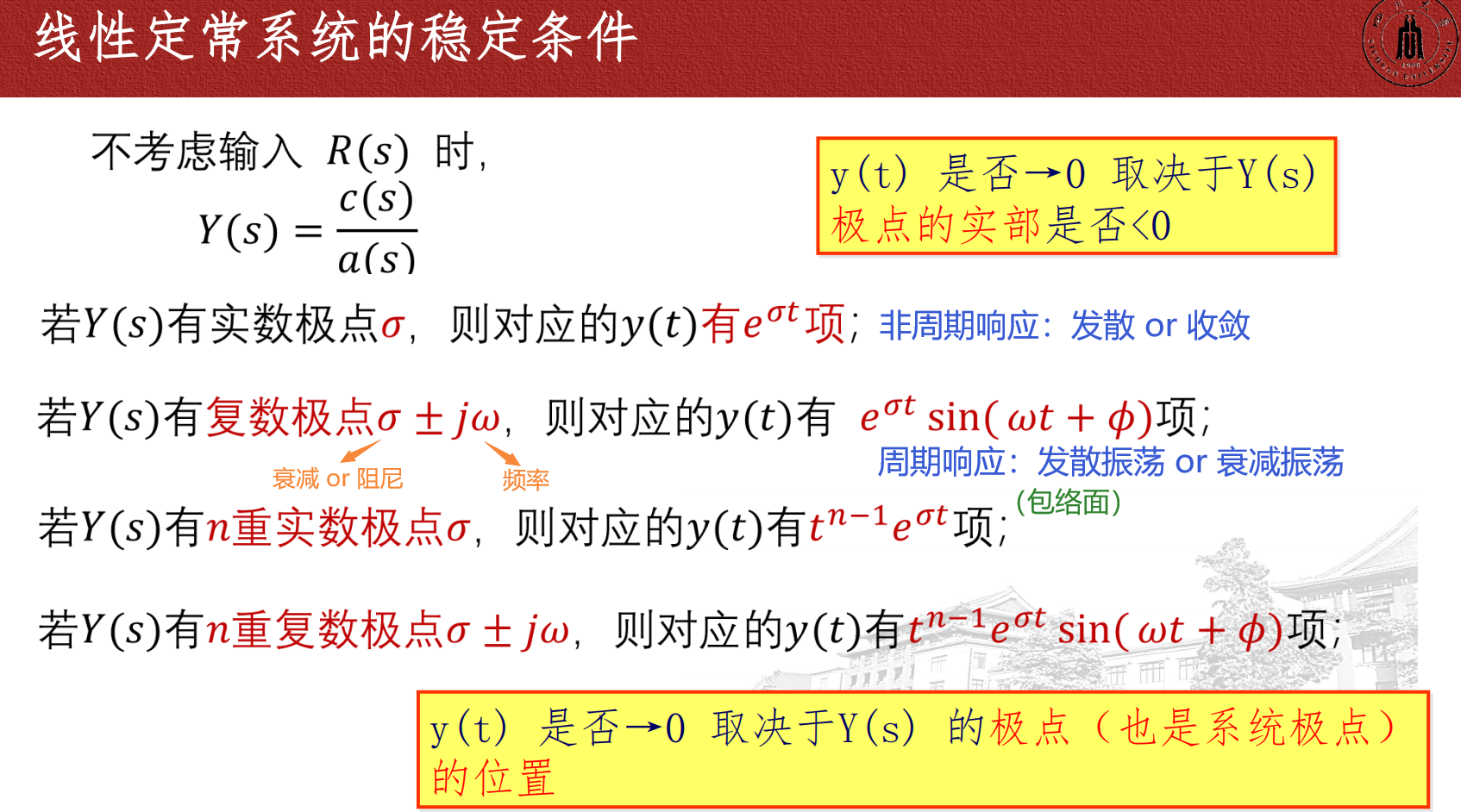
- 由式(3.60)可知,线性系统的稳定性取决于状态的零输入响应。
- 而3.2节已指出,线性系统状态的零输入响应特性取决于系统极点的分布。
- 故线性定常系统的稳定性取决于系统极点的分布。
设线性定常系统的特征方程为
![]()
特征方程的根![]() 即系统极点,在S平面(即复平面)上的分布,不外乎有下列三种情况:
即系统极点,在S平面(即复平面)上的分布,不外乎有下列三种情况:
① 系统极点都分布在左半开S平面上
这时系统极点均具有负实部,即![]()
![]() 。由式(3.23)或式(3.24)可知:当时间t趋于无穷时系统的运动轨迹,即状态的零输入响应将趋于零。
。由式(3.23)或式(3.24)可知:当时间t趋于无穷时系统的运动轨迹,即状态的零输入响应将趋于零。
故根据定义,线性定常系统为渐近稳定的。
② 至少有一系统极点分布在右半开S平面上
分布在右半开平面上的系统极点,其实部为正的。于是由式(3.23)或式(3.24)可知,随着时间的推移,系统的运动轨迹将是发散的。
故根据定义,线性定常系统为不稳定的。
③ 系统极点都分布在左半闭S平面上,且在虚轴上有极点
这时系统极点的实部为非正的,即![]() 。由式(3.23)或式(3.24)可知:与分布在左半开平面上的极点,相对应的自由运动分量,当t→∞时将趋于零,故对系统稳定性起关键作用的是分布在虚轴上的极点。
。由式(3.23)或式(3.24)可知:与分布在左半开平面上的极点,相对应的自由运动分量,当t→∞时将趋于零,故对系统稳定性起关键作用的是分布在虚轴上的极点。
虚轴上的极点可分为两种类型:状态矩阵A的最小多项式的单根或重根(请注意:不是特征多项式的单根或重根),相应的线性定常系统为李雅普诺夫意义下稳定的或不稳定的。
现以表3.5所列的三个系统为例,对此加以说明。
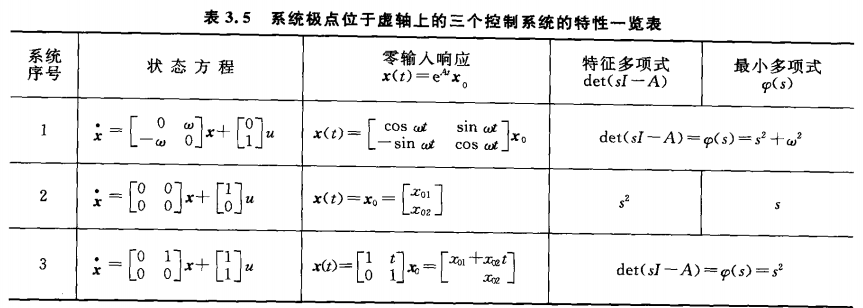
这些系统的极点均分布在虚轴上。设初态为![]()
![]() ,于,则由式(3.18)可分别求得各系统状态的零输入响应以及特征多项式和最小多项式如表中所列。
,于,则由式(3.18)可分别求得各系统状态的零输入响应以及特征多项式和最小多项式如表中所列。
由“线性代数”可知:
- 当系统极点为互异的单根,或特征方程虽有重根但状态矩阵化为约当形后每个(相同的)重极点只对应一个约当块时,则系统的最小多项式与特征多项式相同,表中的系统1和3就属于这一类型;
- 当重极点对应多个约当块时,则系统的特征多项式与最小多项式不同,后者的次数低于前者的次数1,表中系统2就属于这一类型,其极点为重根
 ,A矩阵为约当形且重极点对应两个一阶的约当块,故其最小多项式的次数低于特征多项式的次数。
,A矩阵为约当形且重极点对应两个一阶的约当块,故其最小多项式的次数低于特征多项式的次数。
分析表3.5可以看到:在虚轴上具有简单极点的系统1,其状态的零输入响应呈现正弦振荡但是有界的,根据定义可确定该系统为稳定的;系统2和系统3具有相同的特征方程,它们的系统极点均为虚轴上的重根![]() ,但从最小多项式考虑它们则不一样,系统2的极点为其最小多项式的单根,相应的系统状态的零输入响应为一常值(是有界的),根据定义可确定系统2为稳定的;系统3的极点为其最小多项式的重根,相应的系统状态的零输入响应将随着t→∞而发散,根据定义可确定系统3为不稳定的。
,但从最小多项式考虑它们则不一样,系统2的极点为其最小多项式的单根,相应的系统状态的零输入响应为一常值(是有界的),根据定义可确定系统2为稳定的;系统3的极点为其最小多项式的重根,相应的系统状态的零输入响应将随着t→∞而发散,根据定义可确定系统3为不稳定的。
可以证明,上述结论具有普遍的意义。
故可导出,线性定常系统稳定性的条件为:
- 线性定常系统为李雅普诺夫意义下稳定的充分必要条件是,所有系统极点
均具有非正的实部
,且具有零实部的系统极点为最小多项式的单根。
- 线性定常系统为(大范围)渐近稳定的充分必要条件是,所有系统极点均具有负实部。
- 若具有零实部的系统极点,为最小多项式的重根或者至少有一个系统极点具有正的实部,则线性定常系统为不稳定的。
上面对李雅普诺夫意义下的稳定性作了严格的定义,这在理论上是很有意义的。
但从工程的观点,所谓稳定的系统必须是能够真正稳定工作的系统。而李雅普诺夫意义下的稳定,意味着有极点分布在虚轴上,其相应的自由运动含有等幅振荡![]() 或恒定不变的分量,这在实际系统中往往是不允许的,更何况系统存在着许多扰动和不确定性因素,易使虚轴上的极点滑到右半平面上从而使系统变成为不稳定的。
或恒定不变的分量,这在实际系统中往往是不允许的,更何况系统存在着许多扰动和不确定性因素,易使虚轴上的极点滑到右半平面上从而使系统变成为不稳定的。
因此控制工程对系统的要求,不只是稳定而应是渐近稳定的。
线性定常系统的内部稳定性
关于线性控制系统内部稳定性的定义,虽然不同的文献有不同的提法,但它们都是基于李雅普诺夫稳定性来定义的。

- 本书作为指导工程实践类的书籍,采用后一种定义。
- 工程上的稳定性要求系统极点全部在左半开平面。
- 在虚轴上的极点是临界稳定,在工程上被视为是不稳定的。
不同定义之间只是提法不同,并无本质的区别。本书采用工程的观点来定义。
所谓线性控制系统是内部稳定的(简称控制系统稳定),指的是系统在李雅普诺夫意义下渐近稳定。
内部稳定性定义和李雅普诺夫稳定性定义之间的对应关系如表3.6所列。

- 其中李雅普诺夫意义下稳定,从工程的观点它是处于稳定与不稳定的边缘上。
- 故称其为临界稳定,在实际中通常是将它视为不稳定来对待的。
线性定常系统(内部)稳定性的图形表示
今后,线性定常系统的稳定性除了理论分析需要按李雅普诺夫意义下稳定性来讨论外,通常是按上述内部稳定性的定义来叙述的。
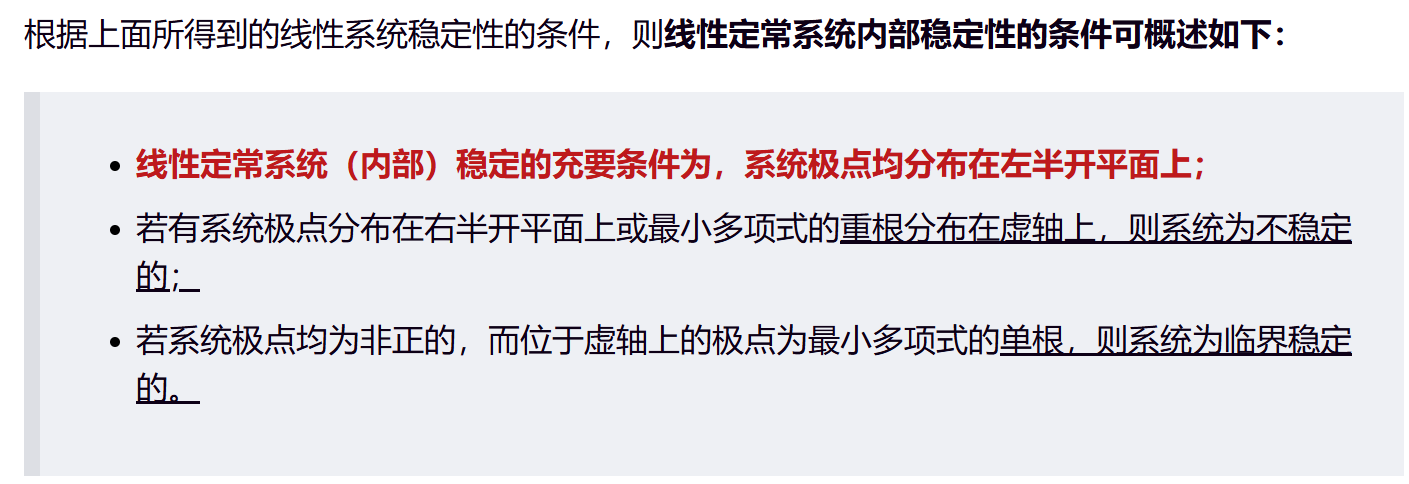
根据上面所得到的线性系统稳定性的条件,则线性定常系统内部稳定性的条件可概述如下:
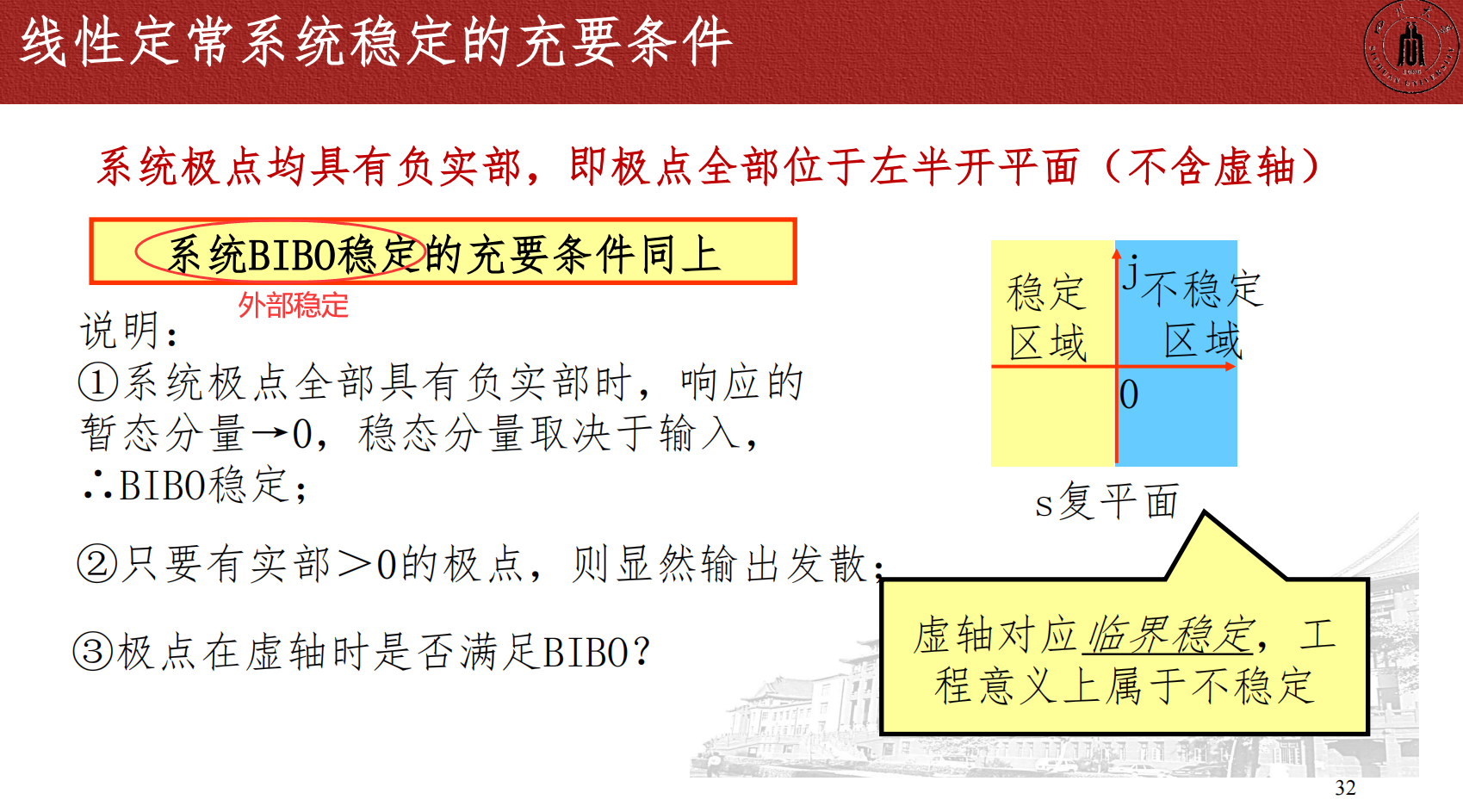
- 线性定常系统(内部)稳定的充要条件为,系统极点均分布在左半开平面上;
- 若有系统极点分布在右半开平面上或最小多项式的重根分布在虚轴上,则系统为不稳定的;
- 若系统极点均为非正的,而位于虚轴上的极点为最小多项式的单根,则系统为临界稳定的。
而且可用系统极点在S平面上的分布来形象地表示,如图3.10所示。
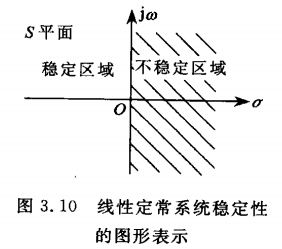
整个S平面可划分为两个区域:
- 左半开平面为稳定区域,凡是系统极点都落在此区域内则该系统为稳定的;
- 右半开平面为不稳定区域,凡是系统有一极点落在此区域内则该系统为不稳定的;
- 而虚轴为稳定区域与不稳定区域的交界线,凡是系统有极点落在虚轴上但为最小多项式的单根,而没有极点分布在右半开平面上的,则该系统为临界稳定的。
3.4.2 外部稳定性及其与内部稳定性之间的关系
(1)外部稳定性
控制系统运动的外部稳定性,是从系统的输入输出关系来考察稳定性的,而不考虑系统内部状态如何变化。
为了使系统的输入输出描述是唯一和有意义的,总是假定初始状态为零。
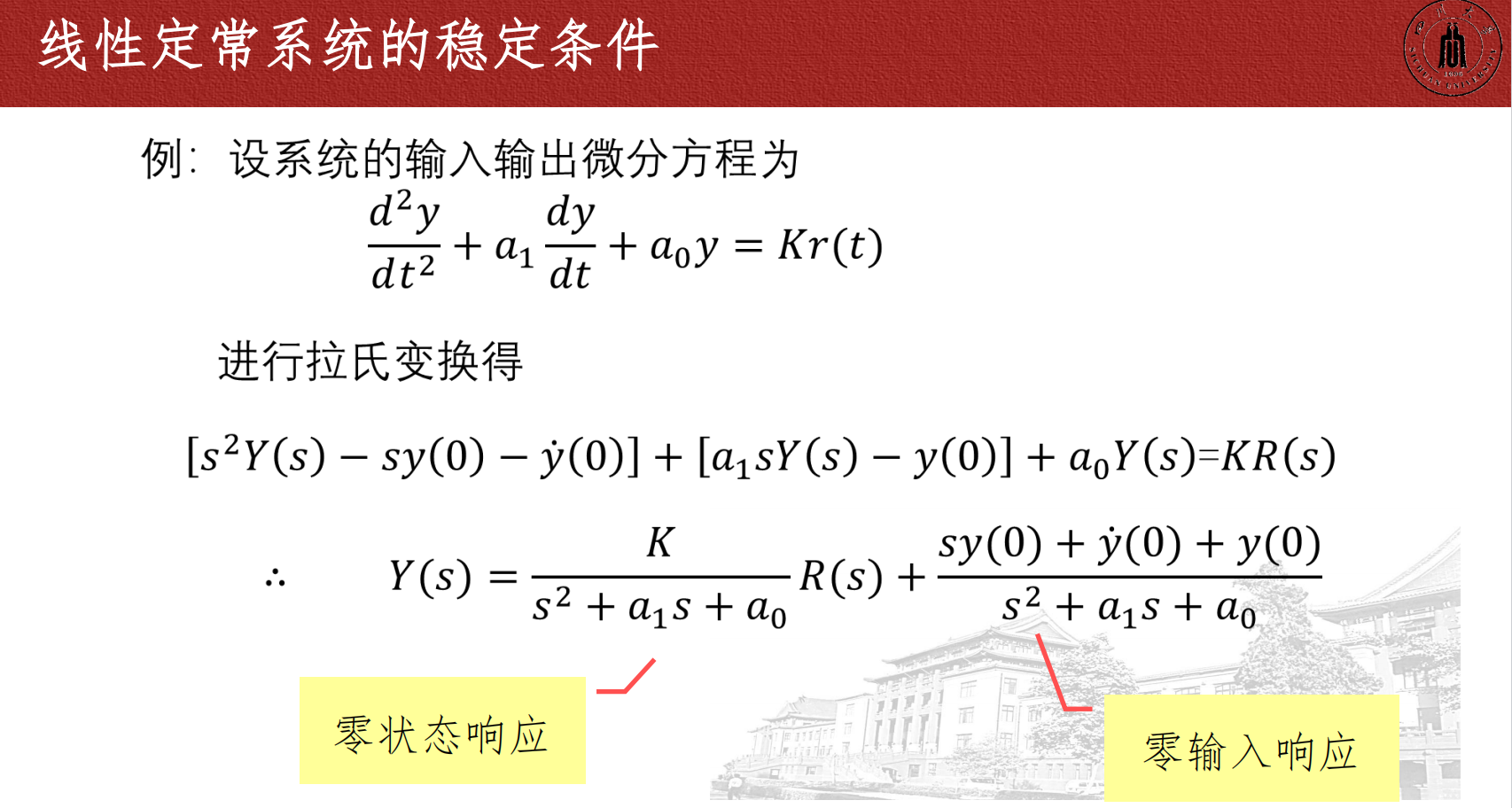
这时所考察的系统运动,实际上是它的零状态响应(分量),故外部稳定性又称为零状态响应稳定性。
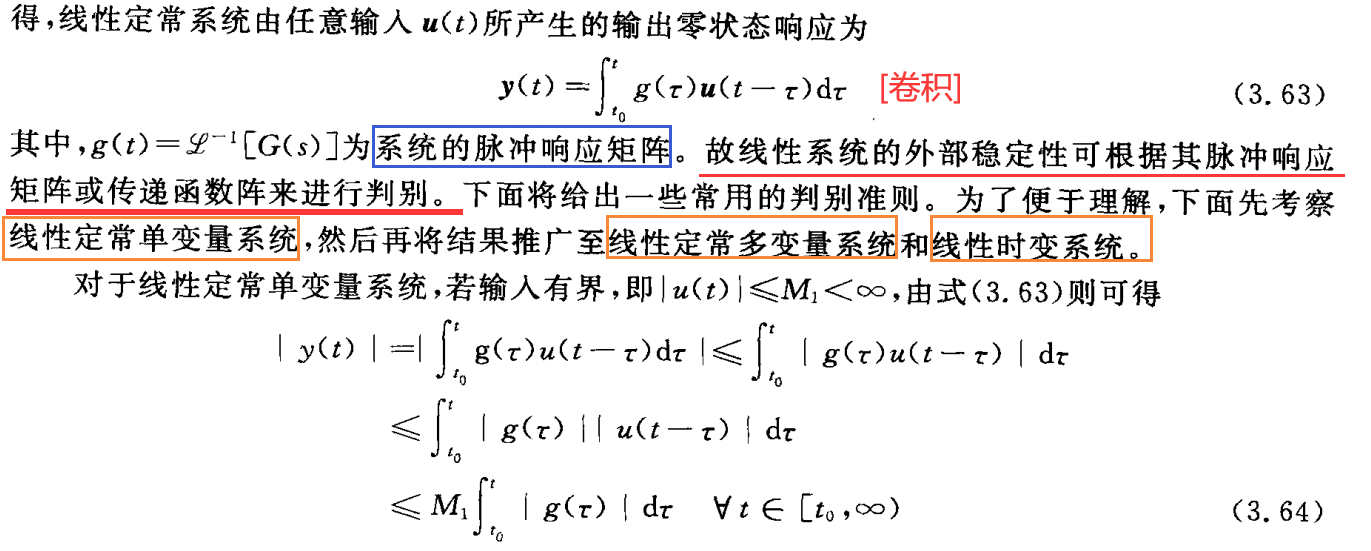
线性系统的输入输出关系,可以用传递函数阵或脉冲响应矩阵来描述。
以线性定常系统为例,其常用的输入输出描述为
![]()
式中,Y(s)为q维输出向量,U(s)为p维输入向量,G(s)为q×p传递函数阵。
而脉冲响应矩阵g(t)与传递函数阵G(s)之间构成一拉氏变换对,即![]()
外部稳定性的定义
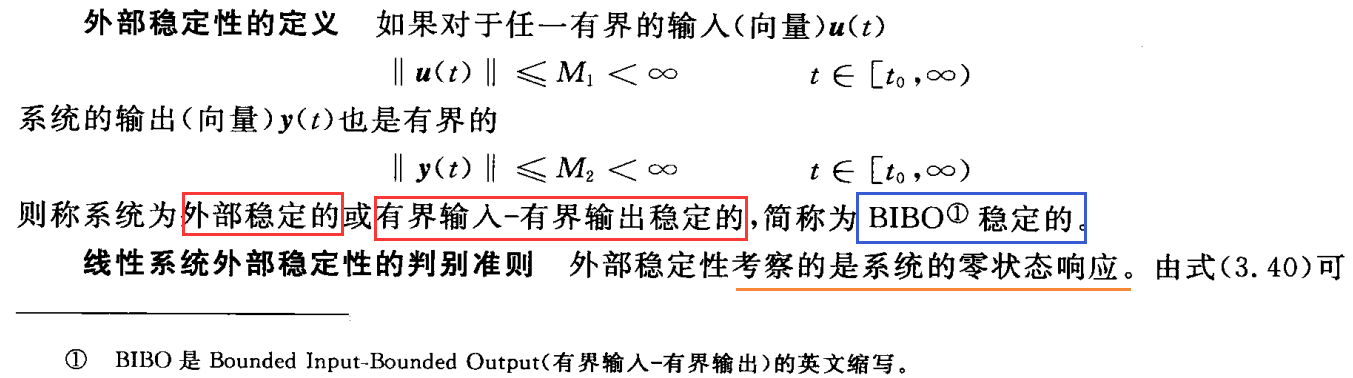
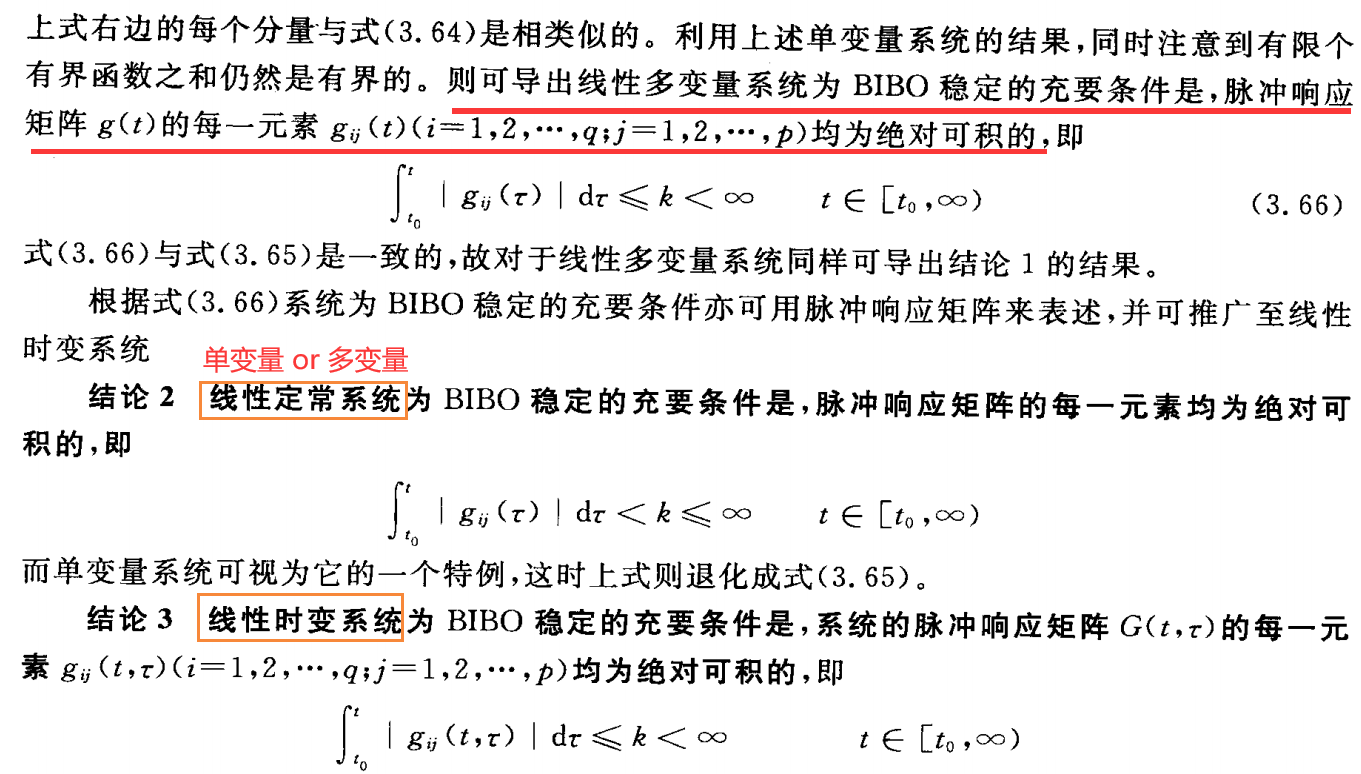
由此可见:为使输出也有界从而系统是BIBO稳定的,其充要条件为
- 即系统的单位脉冲响应是绝对可积的。
- 而
,上述条件可等价地转换为,要求传递函数G(s)的所有极点均具有负实部。

若传递函数某个极点具有正实部,式(3.65)将不成立,则系统为不稳定的;
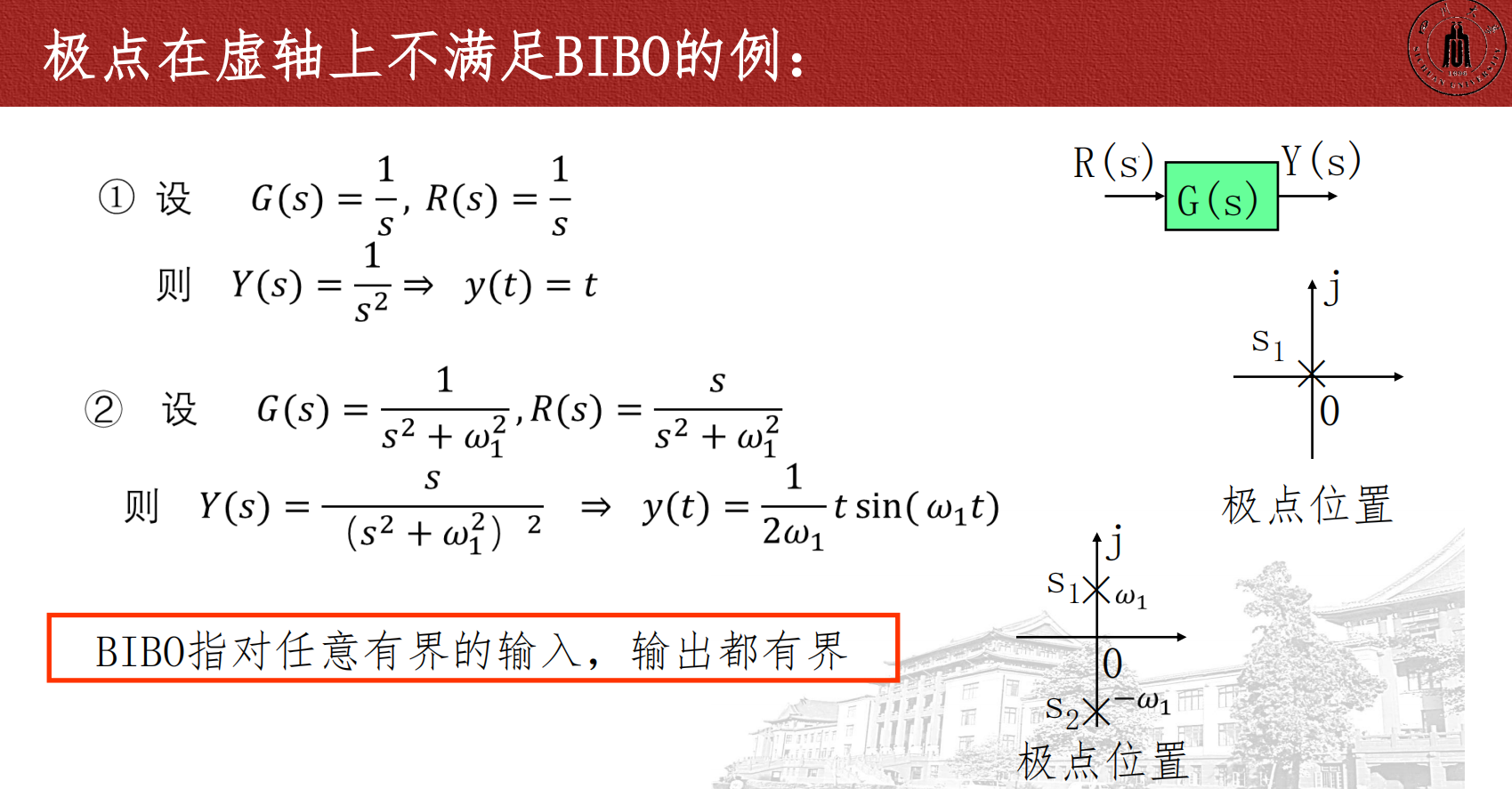
若传递函数的所有极点都不分布在右半开平面上,但在虚轴上有极点时,系统是否为BIBO临界稳定的呢?答案是否定的。
请看下面由G1(s)=1/s所描述的系统,其单位阶跃响应为

显然,系统的单位阶跃响应将随着时间的推移而越来越大,因而是无界的。
故G1(s)所描述的系统不是BIBO稳定的。
综上所述,可得下列结论:
【结论1】线性定常系统为BIBO稳定的充要条件为,所有的G(s)极点均具有负实部。
那么就可以结合之前的结论:
(2)外部稳定性与内部稳定性之间的关系
- 系统的外部稳定性,是基于系统的外部描述法,从输入输出关系来考察系统运动的稳定性。
- 而内部稳定性,是基于内部描述法,从内部状态的变化来考察系统运动的稳定性。
因此外部稳定性和内部稳定性之间的关系,与外部描述法和内部描述法之间的关系是相类似的;
外部稳定的充要条件与内部稳定的充要条件之间的关系,实质上就是2.5.4小节所讨论的传递函数极点与系统极点之间的关系。
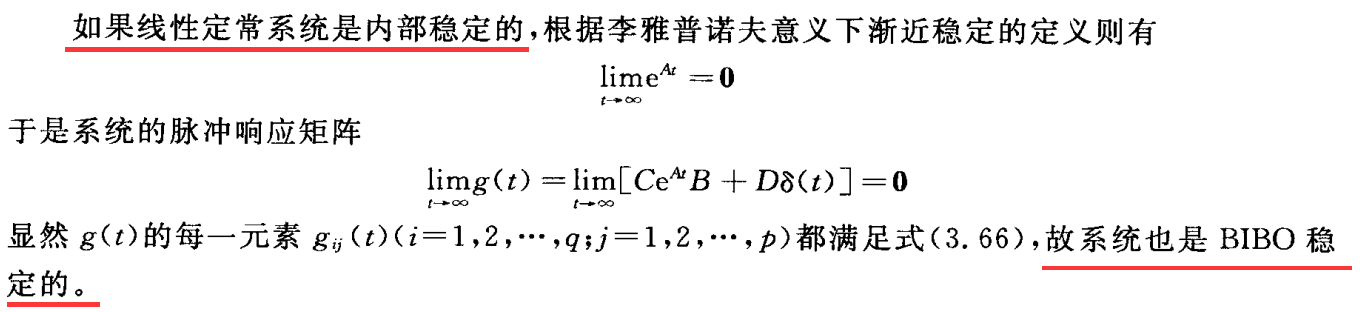
① 内部稳定,必然有外部稳定
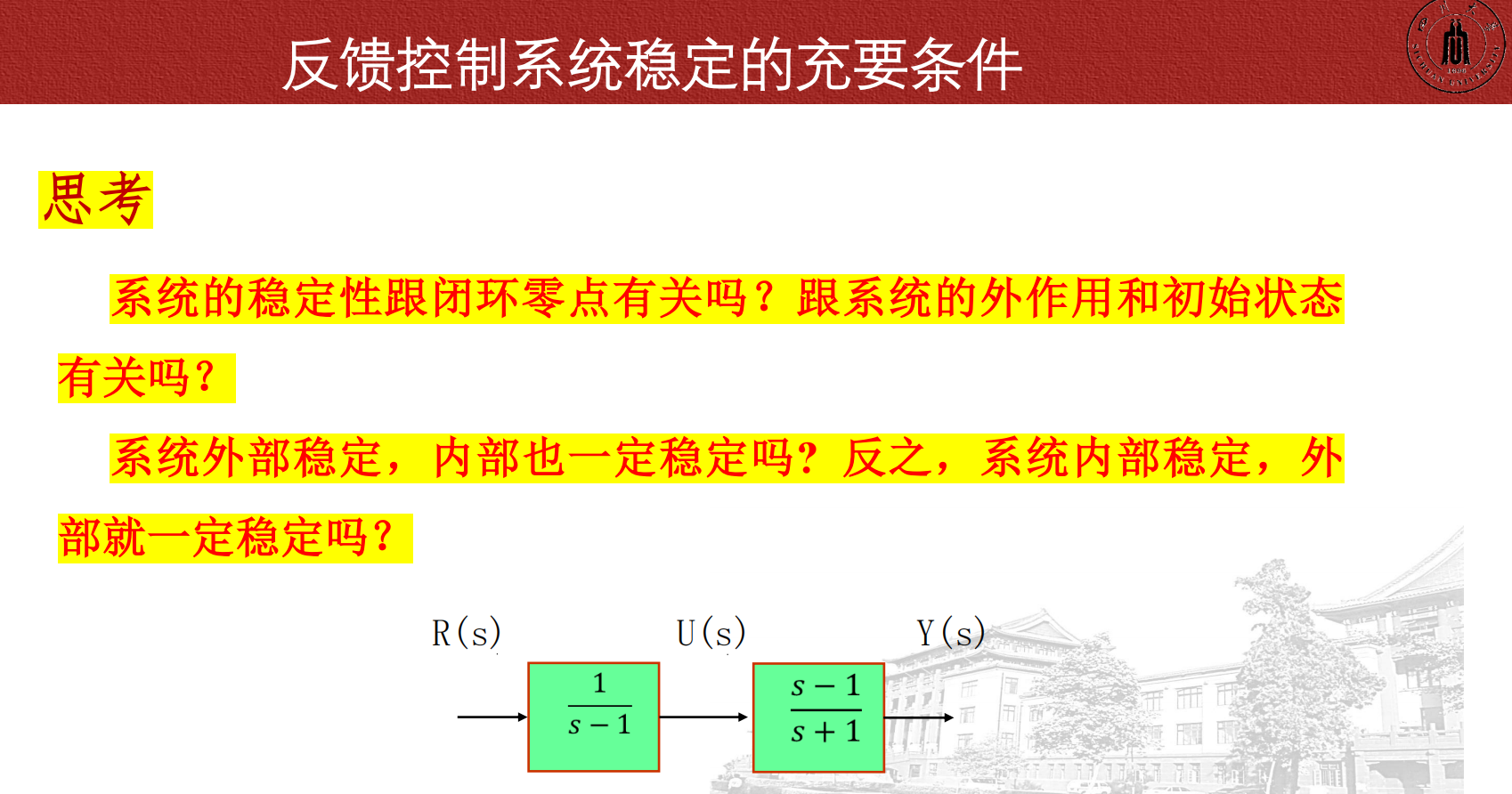
② 外部稳定,内部不一定稳定
线性单变量系统为BIBO稳定的,这只表明系统的传递函数极点均具有负实部。
在2.5.4小节已指出:传递函数可能存在零极相消,一般来说传递函数极点只是系统极点的一个子集。
【结论】
- 如果系统是内部稳定的(即系统极点均具有负实部)则一定也是BIBO稳定的;
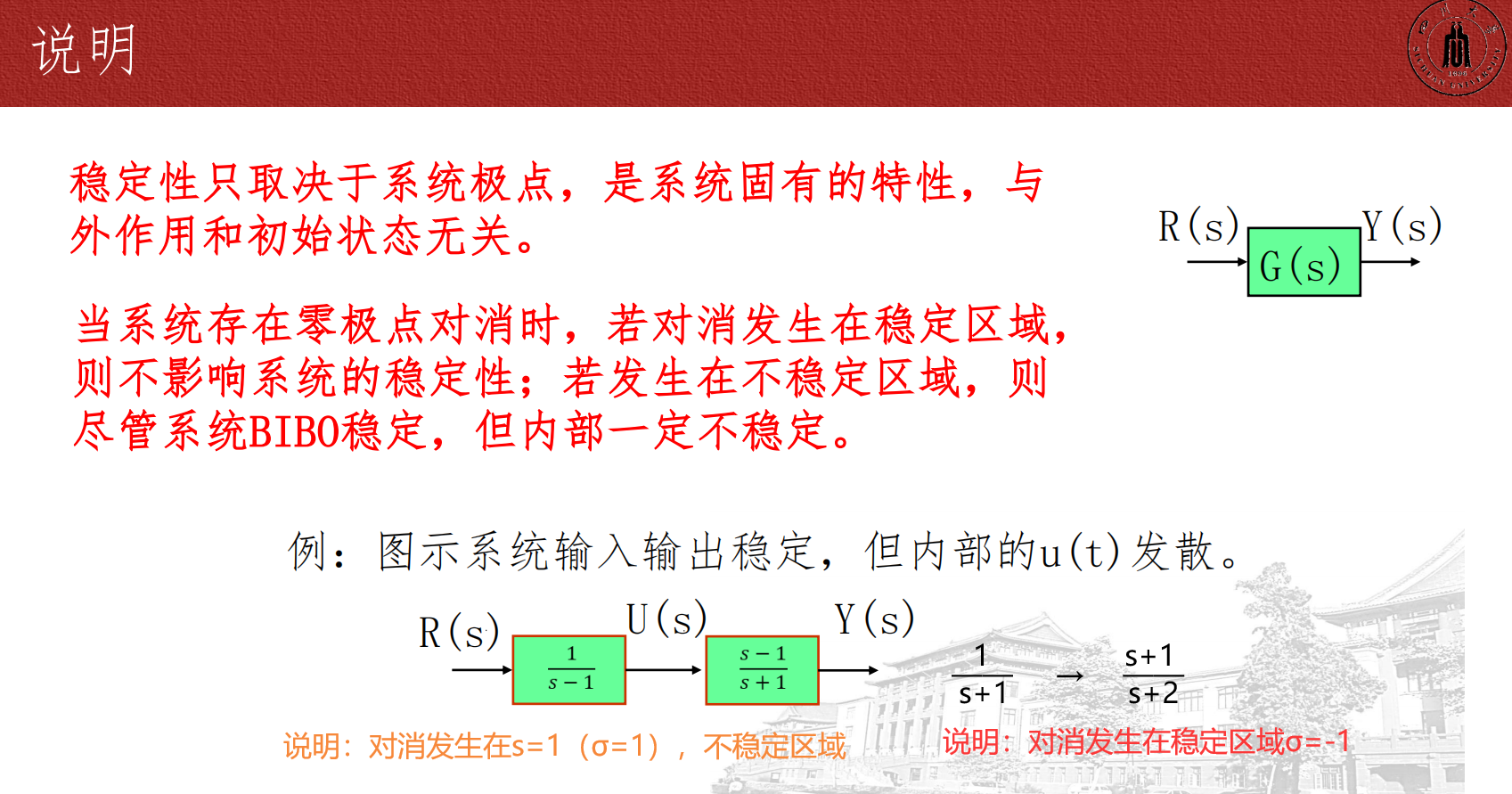
- 但如果系统是BIBO稳定的,则未必也是内部稳定的,要看零极相消时所对消的系统极点是稳定的(分布在S的左半开平面上),还是不稳定的(分布在S的右半闭平面上)而定:
- 若为稳定的,则系统也是内部稳定的;
- 若为不稳定的,则系统就不是内部稳定的;
故关于外部稳定性与内部稳定性之间的关系可概括如下(严格的理论分析见第7章):
- 1)线性定常系统若是内部稳定的,则它必定也是BIBO稳定的;反之则未必。
- 2)当线性定常系统的传递函数无零极相消、或虽有系统零极点相消但相去的为稳定的极点时,则系统的外部稳定性与内部稳定性是一致的。这时下列诸命题是等价的:
① 系统是内部稳定的;
② 系统的零输入响应是渐近稳定的;
③ 系统是 BIBO稳定的;
④ 系统的所有传递函数极点均具有负实部;
⑤ 系统极点(即状态矩阵A的特征值)均具有负实部。
在这种情况下,外部稳定性与内部稳定性是一致的。
工程上绝大多数系统是属于(2)这种类型的,而且通常是按工程意义下来讨论线性系统的稳定性。故下面讨论线性系统的稳定性时,就不再区分“BIBO稳定”或“内部稳定”,而统一称之为“线性系统稳定”。
3.4.3 劳斯-赫尔维茨稳定判据
线性定常系统的稳定性取决于系统极点的分布,于是判断一个系统的稳定性便成为如何确定系统极点的分布问题。
确定系统极点分布的常用方法有两类:
- 一类是直接求解特征方程找出极点的分布情况;(低阶系统:一阶、二阶)
- 另一类是不必求解特征方程,而是通过其他的简便方法就能确定极点分布的情况,从而判断系统的稳定性,如各种的稳定性判别方法(简称稳定性判据)和下章将要介绍的根轨迹法,这些方法在工程上得到了广泛的应用。(高阶系统:三阶、四阶……)
(众所周知,高阶方程不好解)
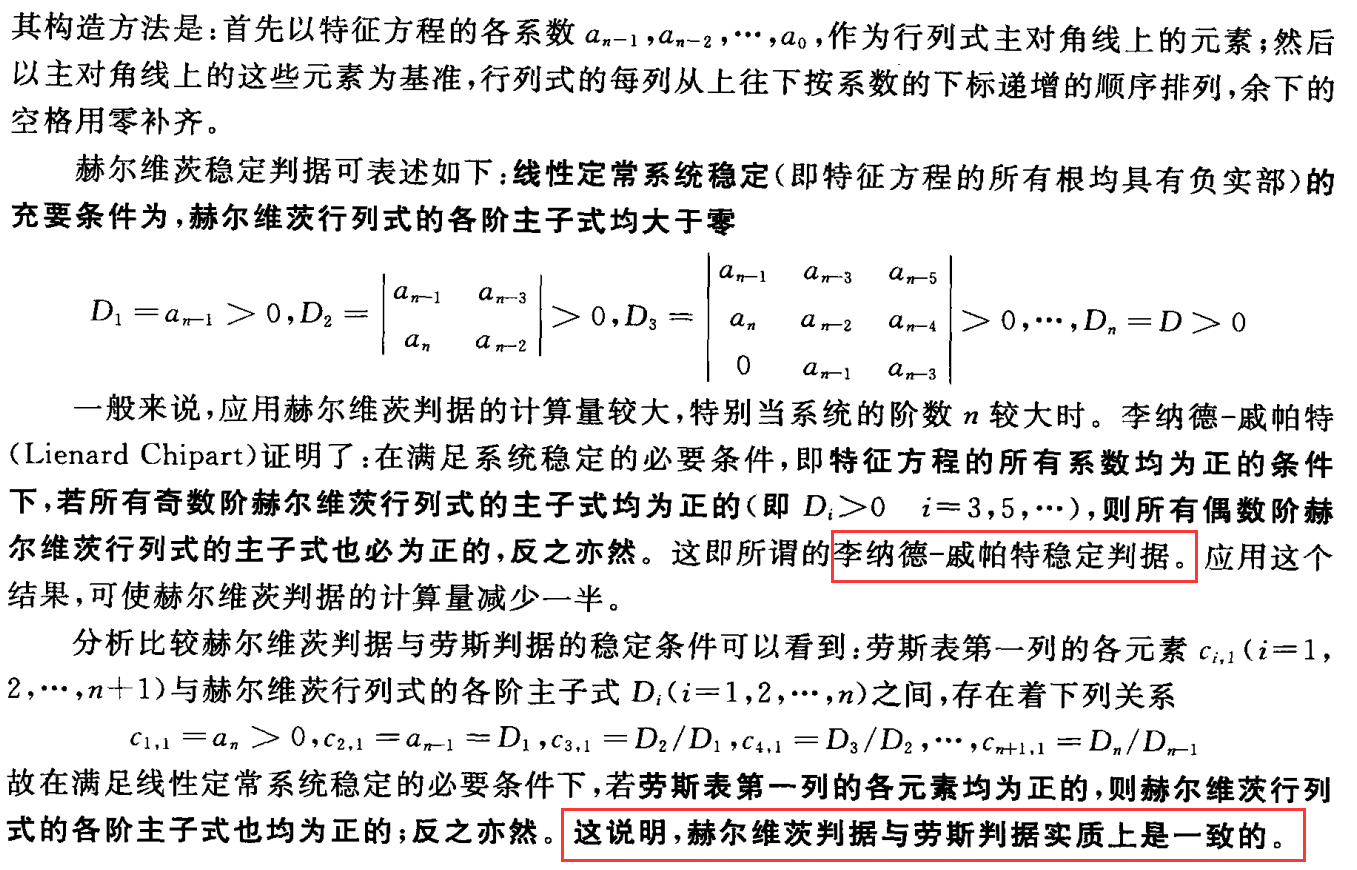
劳斯(Routh)和赫尔维茨(Hurwitz)分别于1877年和1895年各自独立地提出了一种稳定性判据。这两种判据实质上是一致的,都是根据特征方程系数的特性用代数方法来判别系统的稳定性,故通常合称为劳斯-赫尔维茨判据。它们是控制工程中常用的代数判据形式。
下面以常用的劳斯判据为主,介绍这种判据的特点及其应用,并指出赫尔维茨判据不同于劳斯判据的特殊之处。
(1)劳斯判据

线性定常系统稳定的必要条件
由上一小节的讨论可知:如果系统稳定,则系统极点均分布在左半开S平面上。
相应的特征方程的根不外乎有两类:

其中α、σ、ω都是正的。
分析特征方程(3.67)可以看到:
由这两种系数均为正的因式相乘所得的特征方程的系数,必然也都是正的(不可能为负的或零);
而且对于低阶系统的特征方程

所有系数均为正的是低阶系统稳定的充分必要条件。
但是对于高阶系统,系数均为正的特征方程,其根不见得都分布在左半开S平面上。
故可得线性定常系统稳定的必要条件是,特征方程的所有系数均为正的(或系数同号)。
若出现缺项(对应的系数为零)或负的系数,这意味着系统存在实部为非负的极点,则系统不是稳定的,而是不稳定或临界稳定的。
线性定常系统稳定的充要条件
劳斯提出了判别系统稳定的充分且必要的条件,即通常所说的劳斯判据。它不仅能判别系统的稳定性,而且还能确定在右半平面内系统极点的个数,因而在实际中得到了广泛的应用。
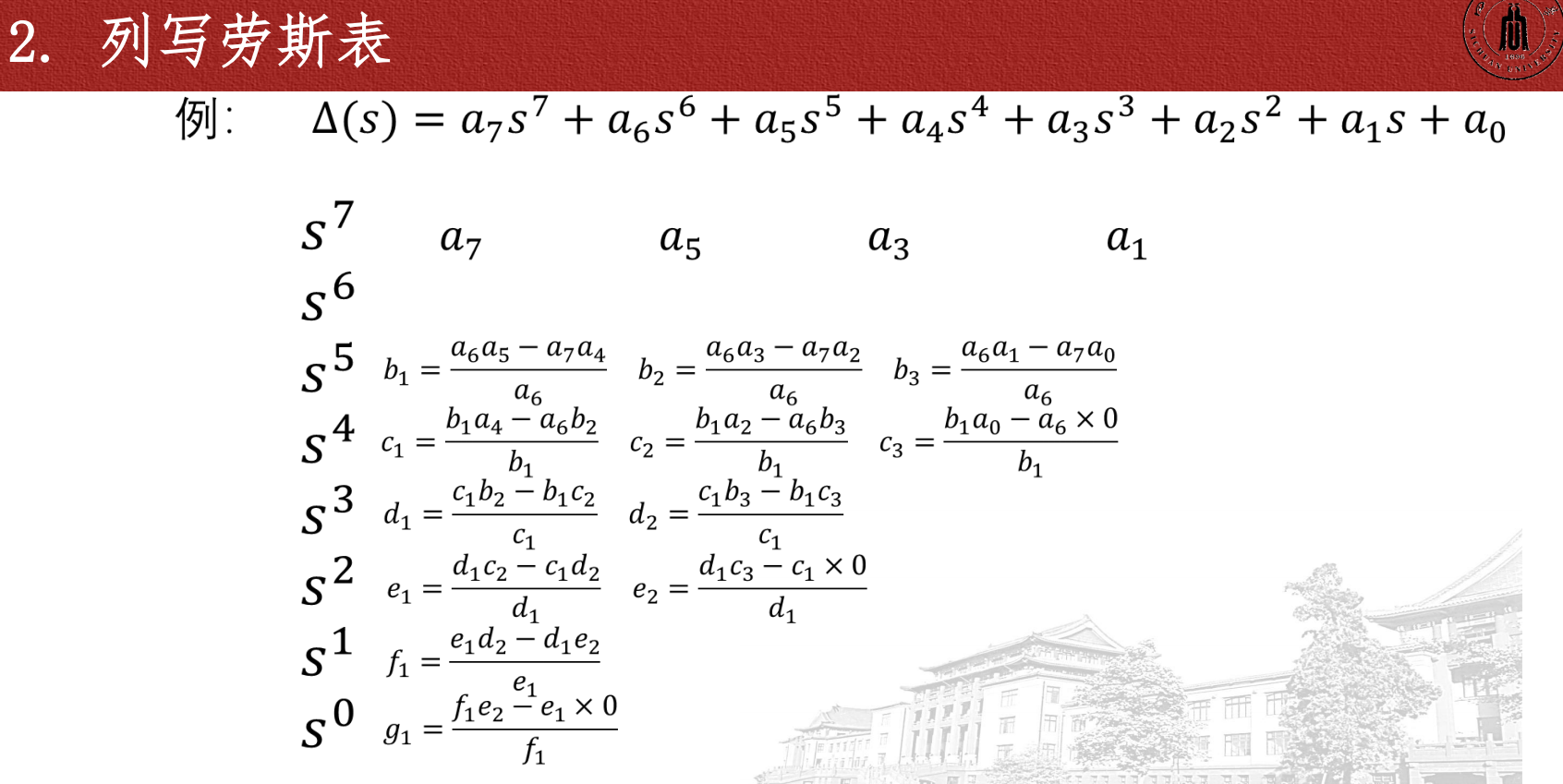
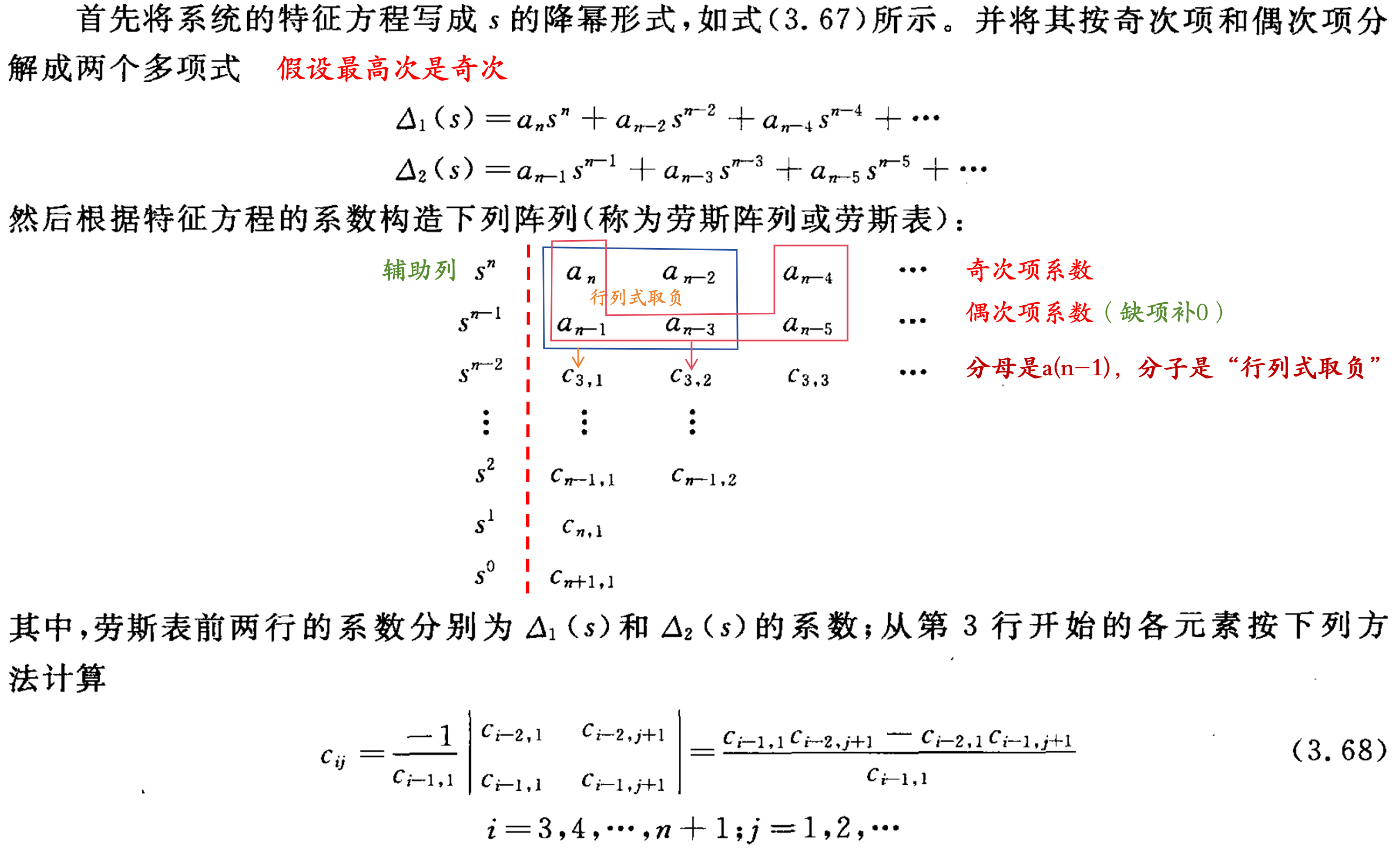
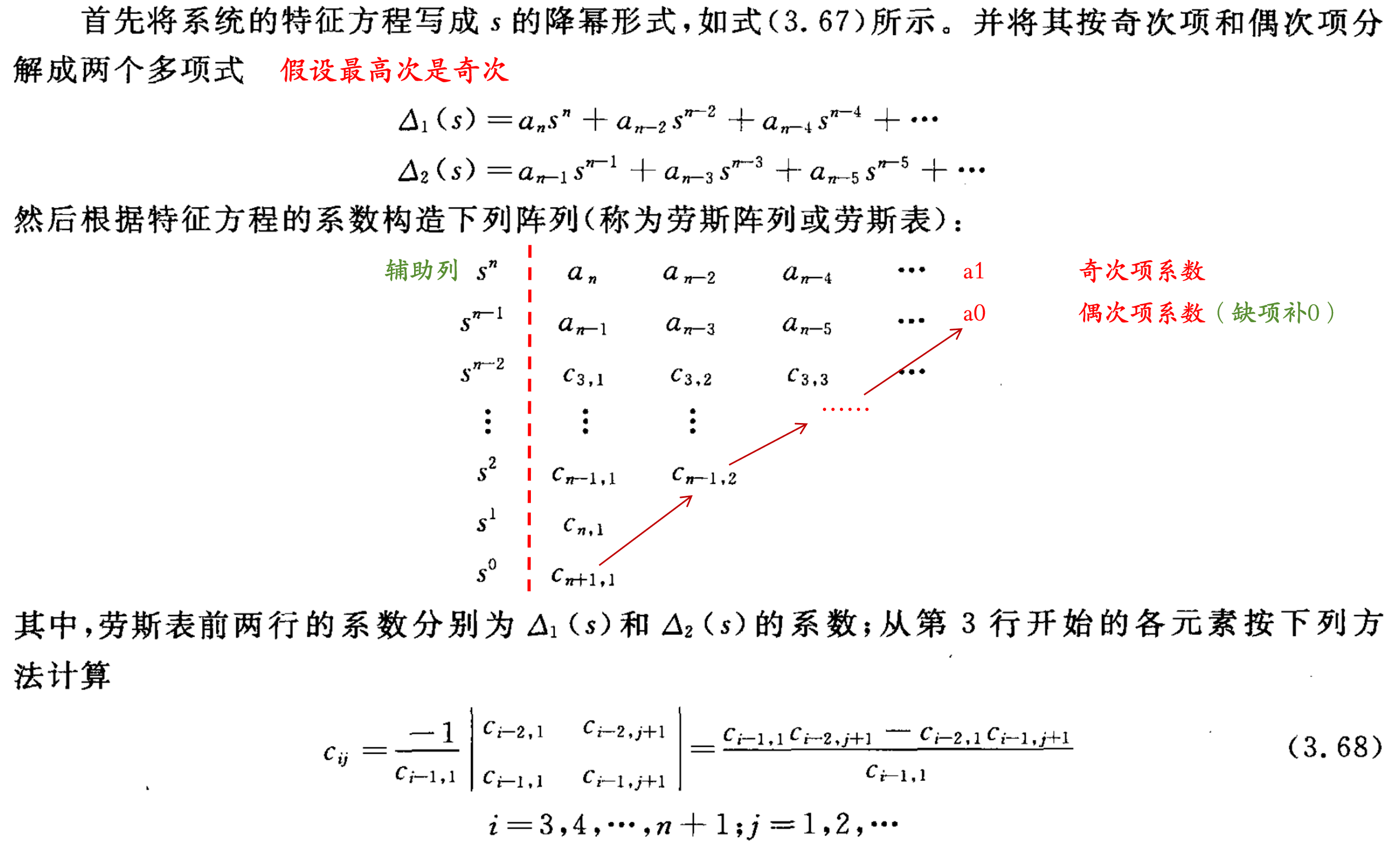
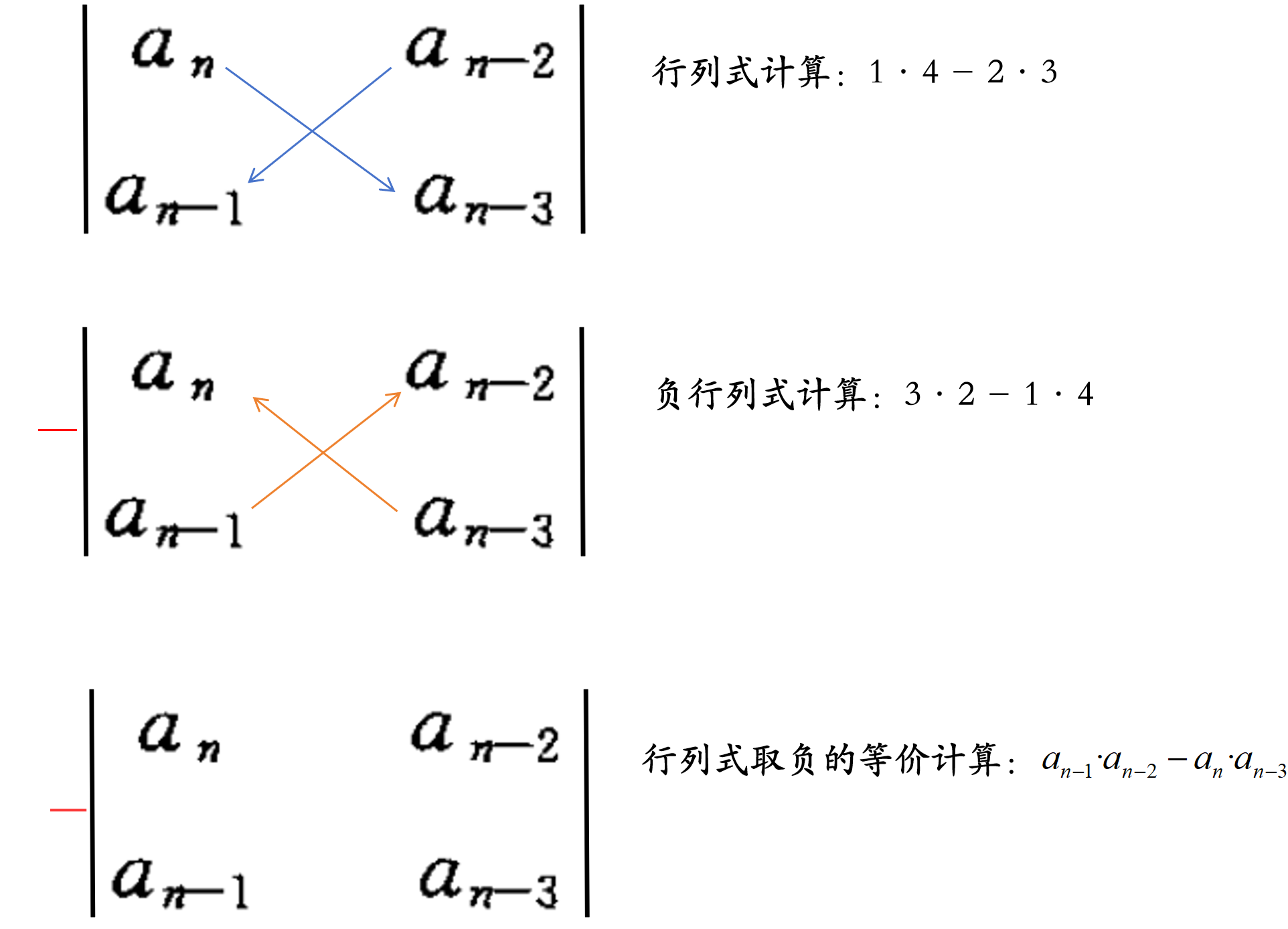
劳斯判据有许多种表示形式,这里仅介绍其常用的阵列形式。
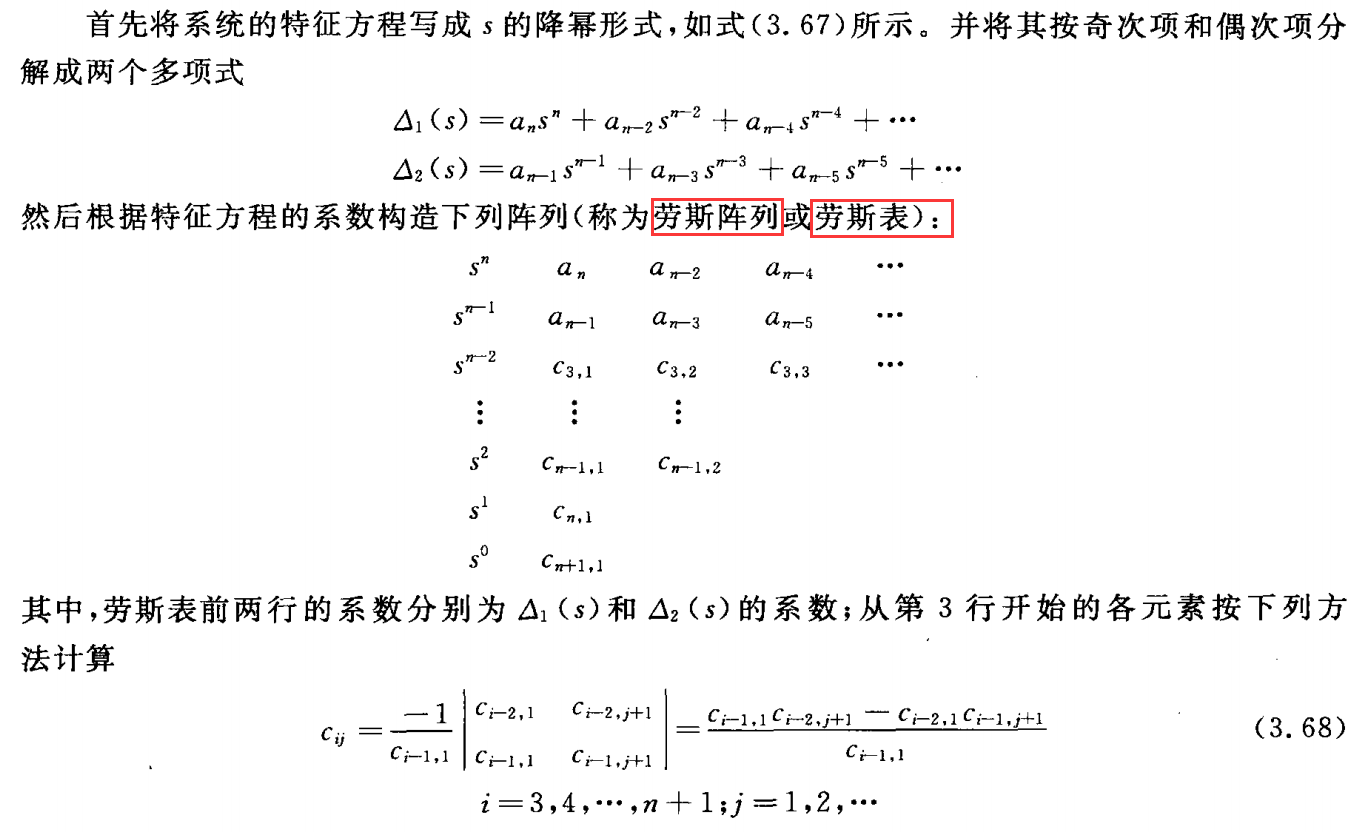

【注意】
- 若元素不存在可将其值视为零;
- 劳斯表共有n+1行,最后一行只有一列,其元素恰好等于特征方程的常数项
- 整个劳斯表呈倒立的阶梯形,最下面两行各有1列,它们上面的两行各有两列,再往上可依此类推。
我的理解
劳斯判据的结论如下:
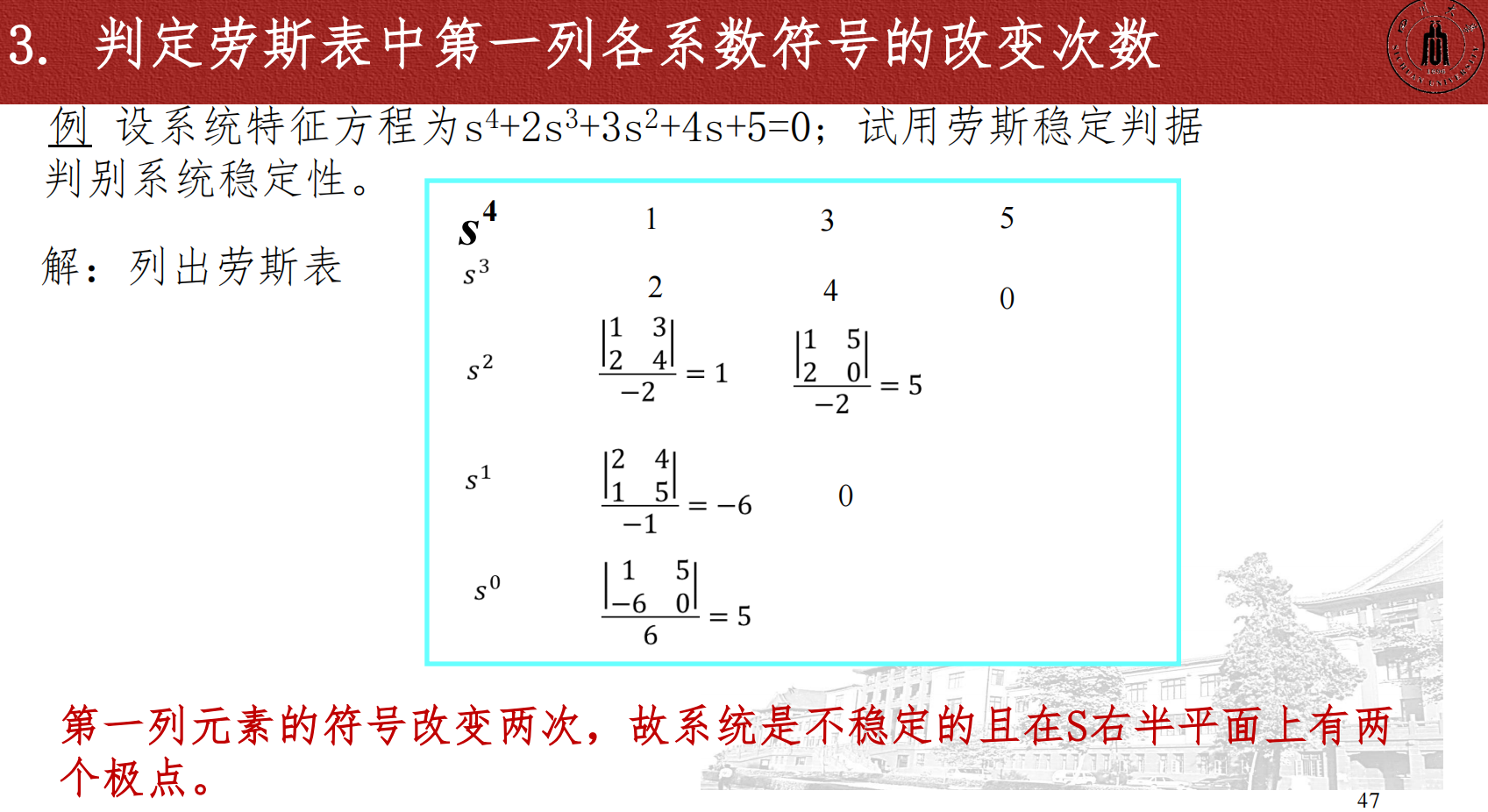
- (1)线性定常系统稳定(即所有系统极点均具有负实部)的充分必要条件为,劳斯表第一列的所有元素全为正的。
若不满足上述条件,在劳斯表第一列的元素中有非正的(即
≤0),这表明系统不是稳定的。系统极点并不都分布在左半开平面上,可能有极点分布在虚轴上(系统临界稳定)或
分布在右半开平面上(系统不稳定)。这可根据元素的特性进一步加以判断。
- (2)若劳斯表第一列的元素出现负的,则系统为不稳定。而且分布在右半开平面上系统极点的个数,就等于第一列元素符号改变的次数。
由于劳斯判据是根据元素的符号进行判断的,故为了简化运算可用一个正整数去除(或乘)阵列某一行的各元素,并不改变稳定性的结论。
- (3)若劳斯表的第一列出现0元素,肯定系统不是稳定的。究竟是不稳定还是临界稳定的,还需根据劳斯表作进一步判断。
由于0元素存在,使得式(3.68)难以应用,必须处理后才能完成劳斯表的构造工作。
现分两种情况讨论如下:
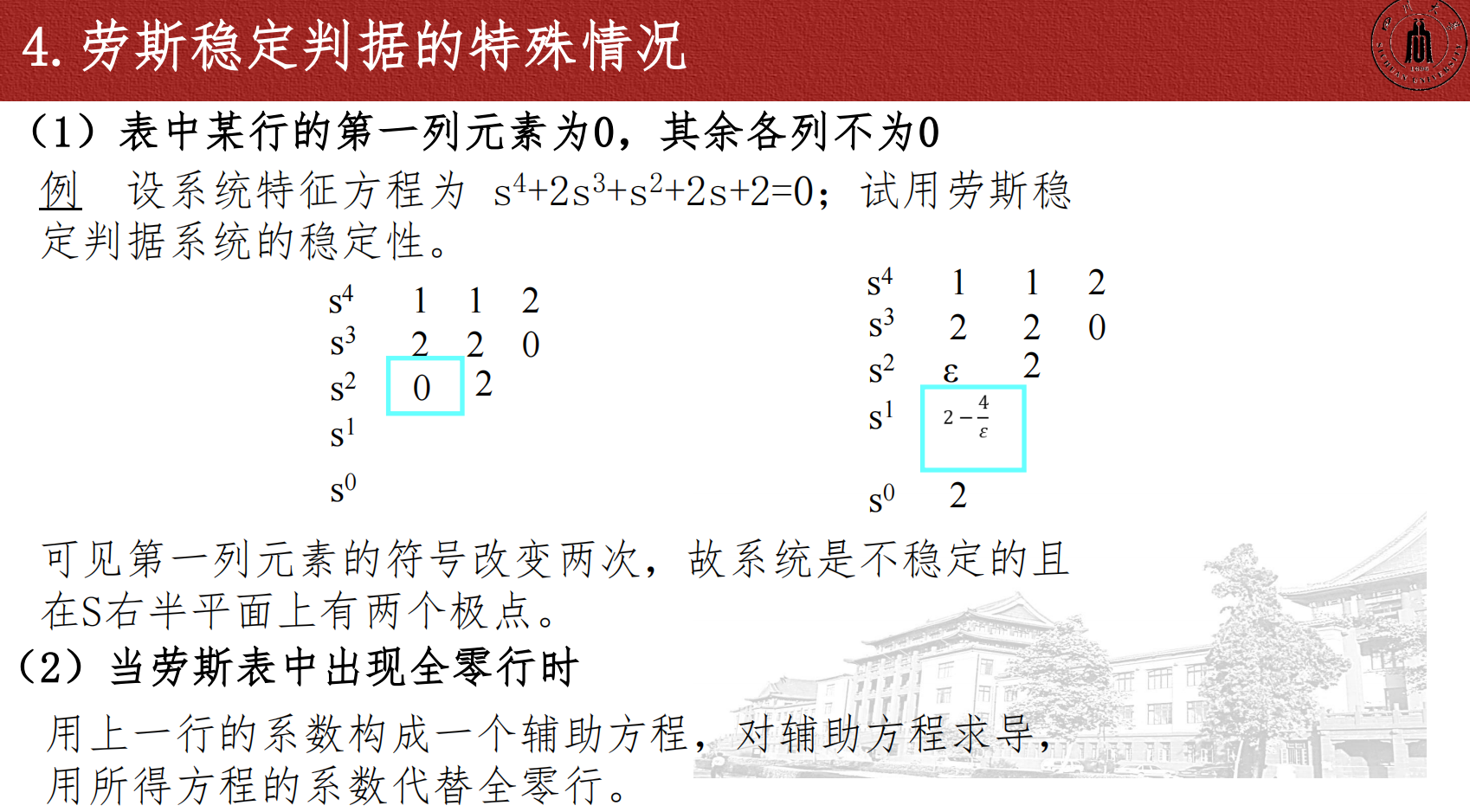
- ① 如果阵列某行的第一列元素为0,而其余各列的元素不全为0时
可以采用摄动的办法使0元素不出现。通常采用无穷小的正数ε来代替0元素,这样就可以按照上述方法和式(3.68)计算阵列的其余元素并进行稳定性判断。
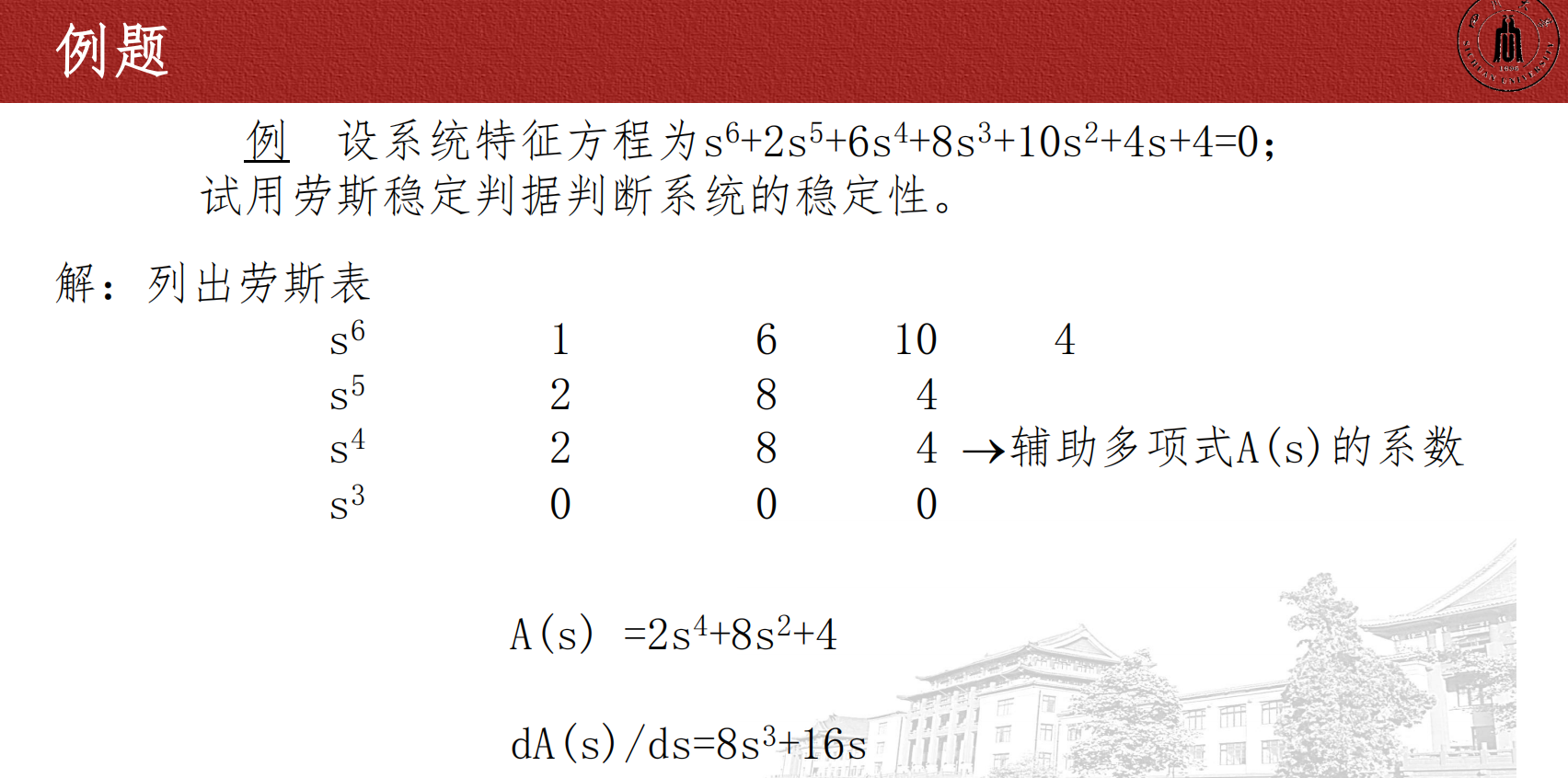
- ② 如果阵列某行的所有元素全为0时
当相邻两行的元素成比例时就会出现这种情况。它表明特征方程存在一些大小相等、符号相反、关于原点对称的根。这时可用全0行的上一行元素作为系数,组成一辅助多项式,并求它对s的导数,然后用辅助多项式导数的系数代替全0行的各元素,继续完成劳斯表的构造工作。而那些大小相等关于原点对称的极点,则可通过解辅助方程来得到,而且这些极点的数目总为偶数。
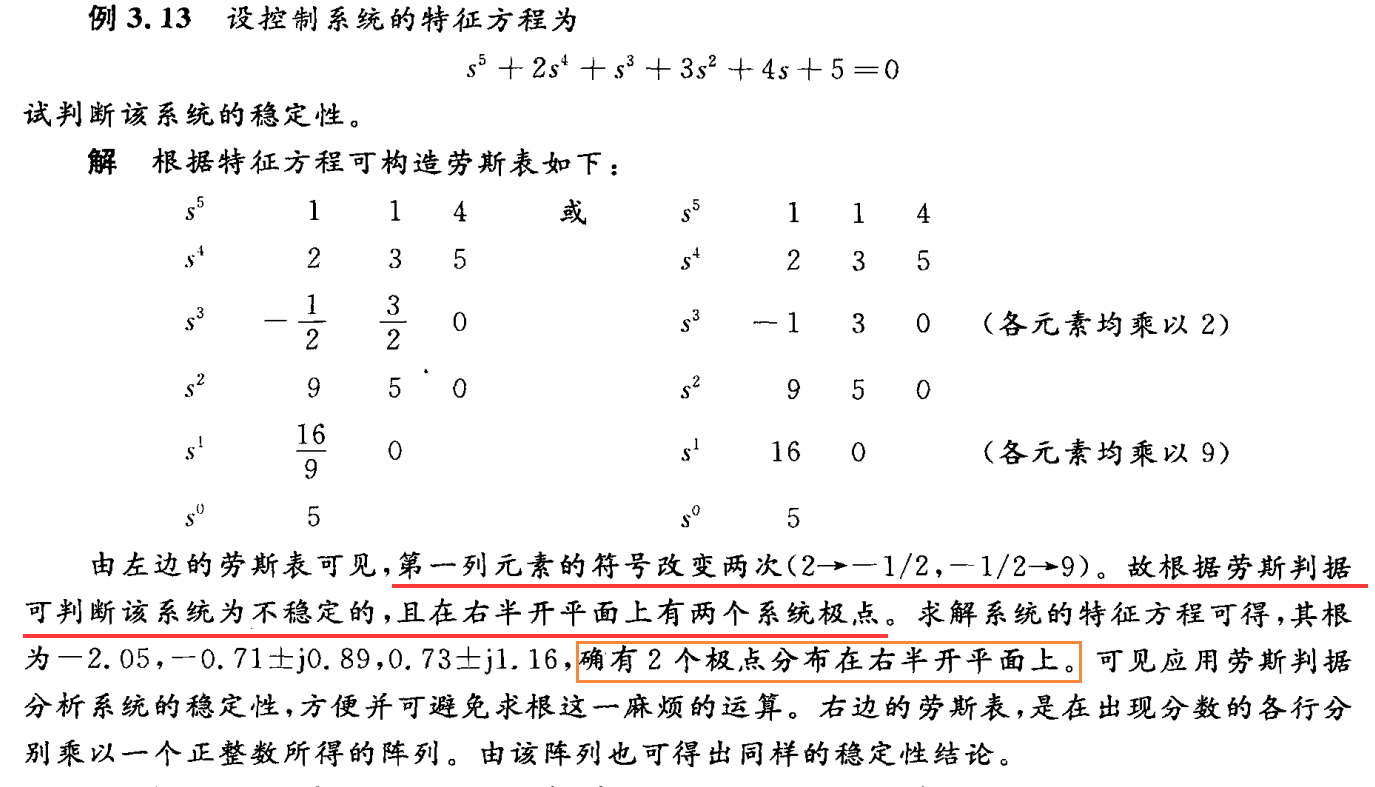
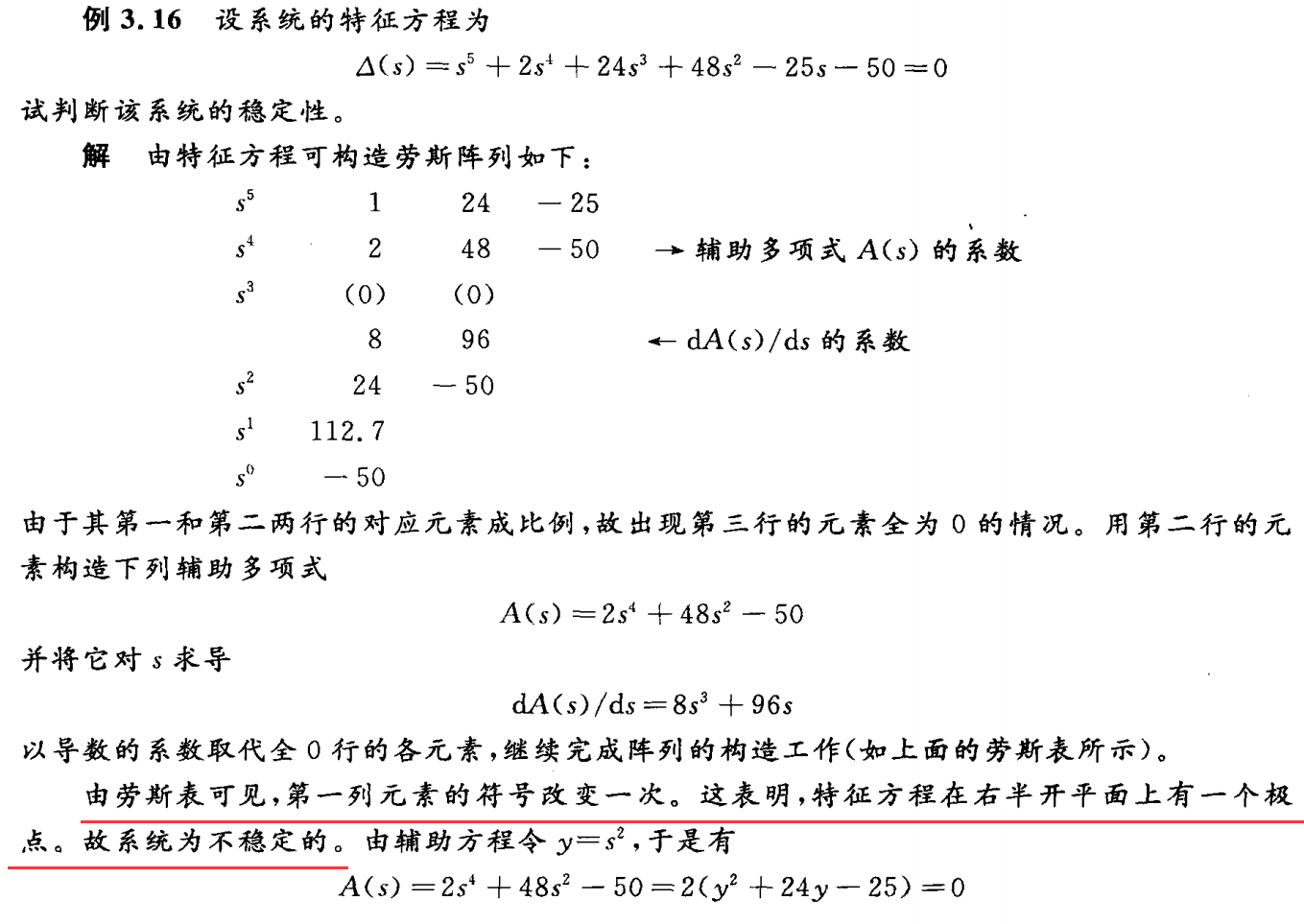
【例题1】
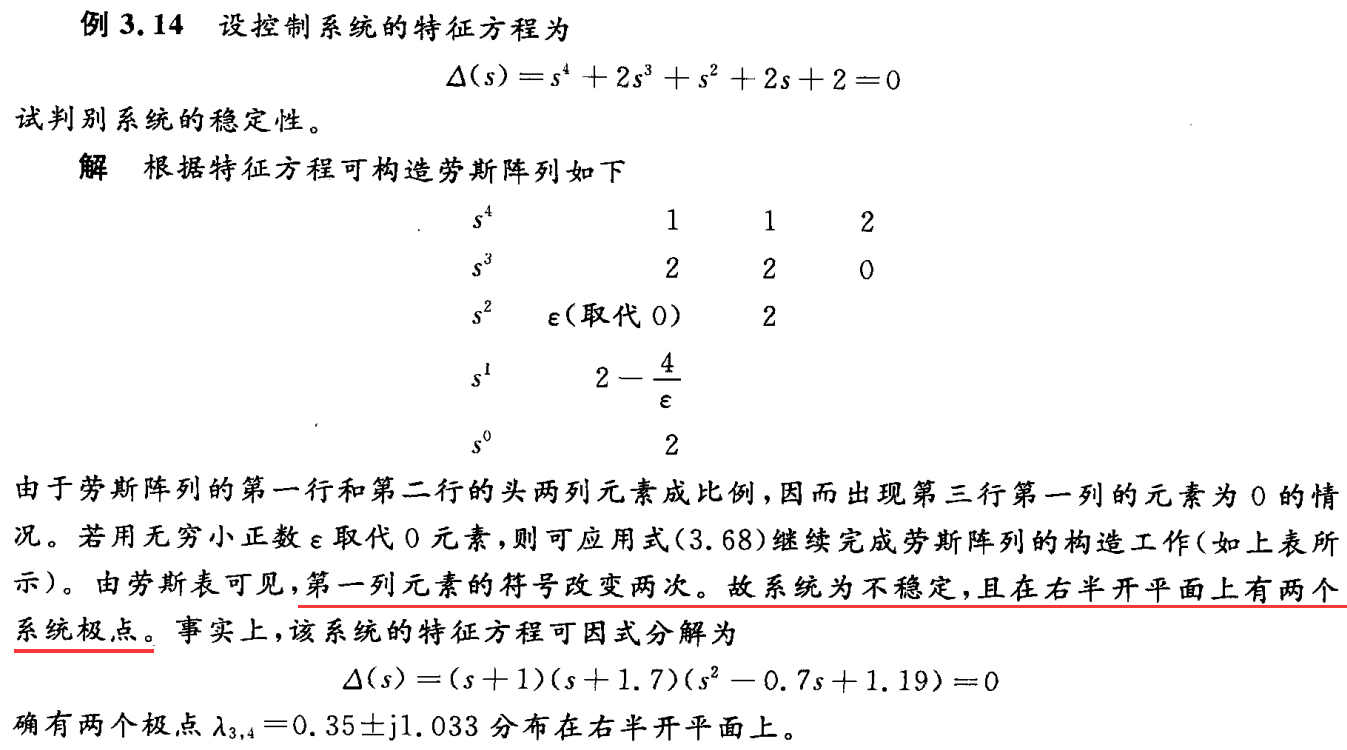
【例题2】
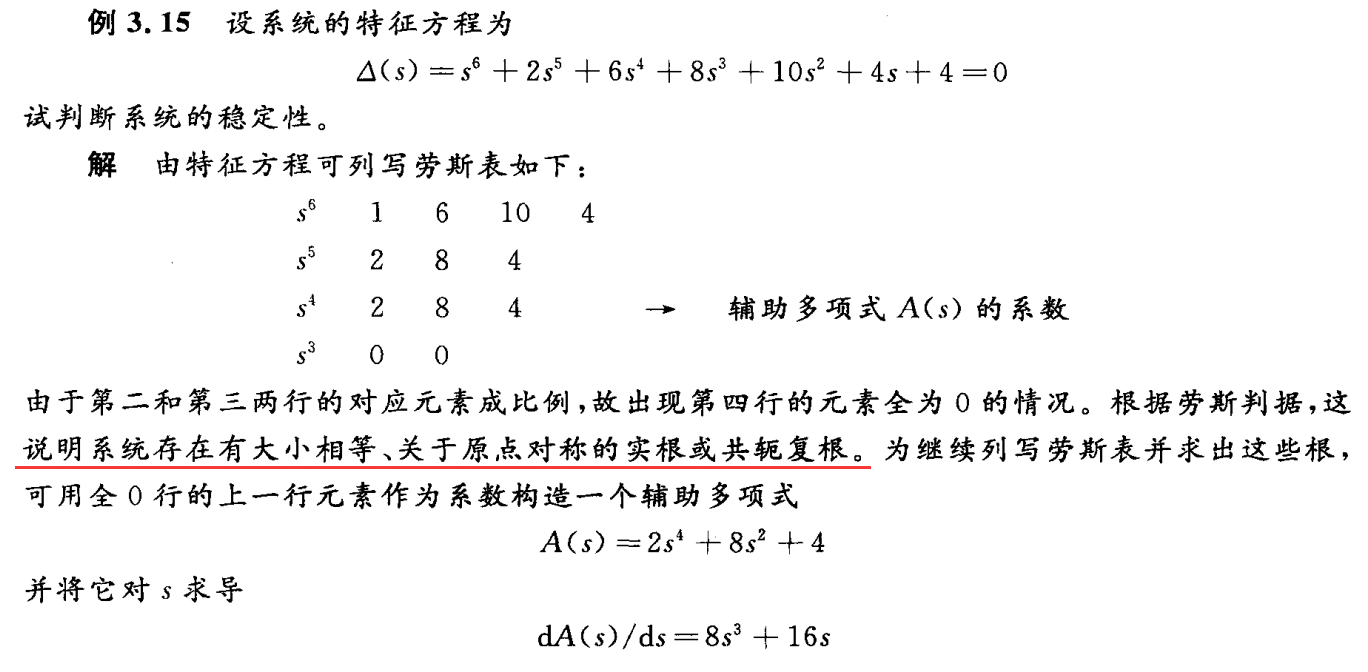
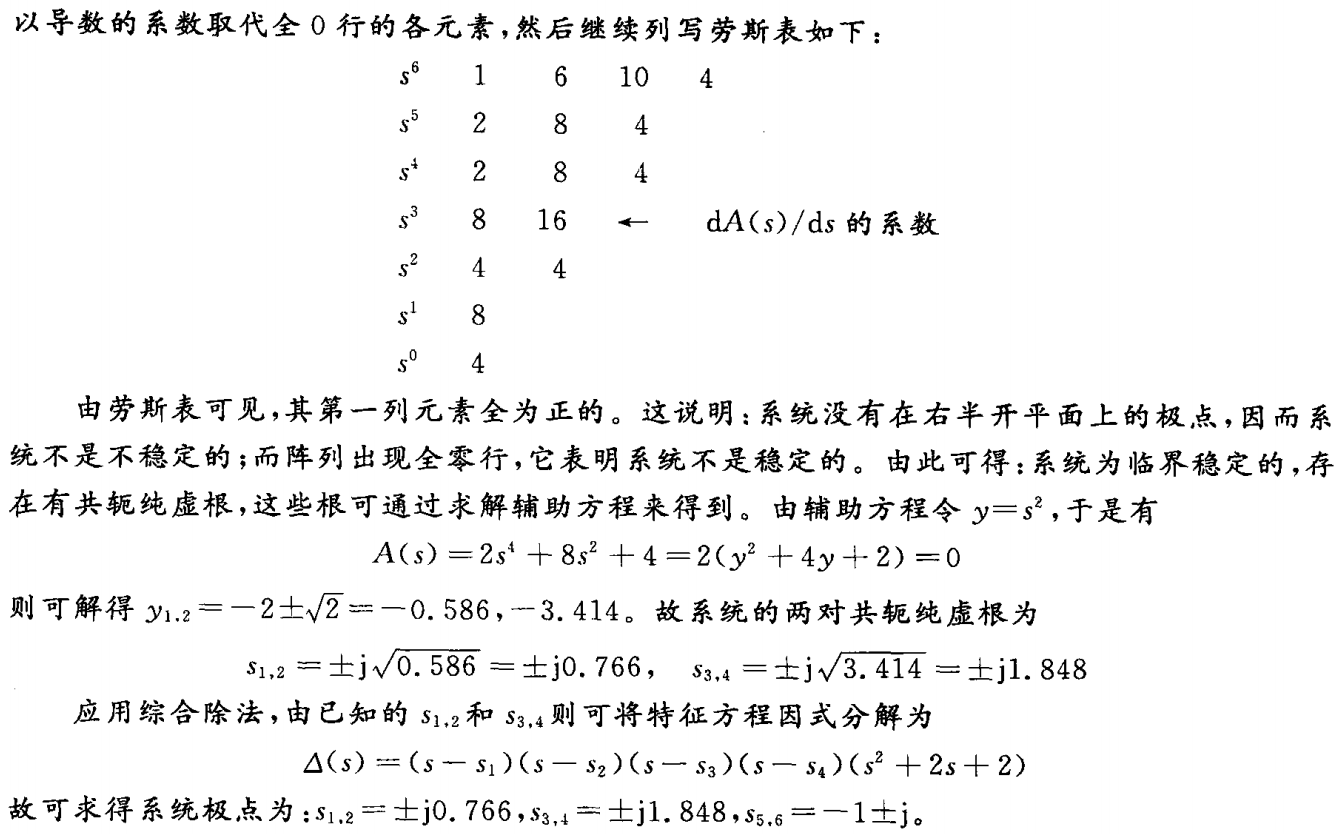
【例题3】
【例题4】

(2)劳斯判据的应用
劳斯判据不仅可以用来判断线性系统的稳定性和确定在右半开平面上系统极点的个数,而且还有下列两方面的应用:
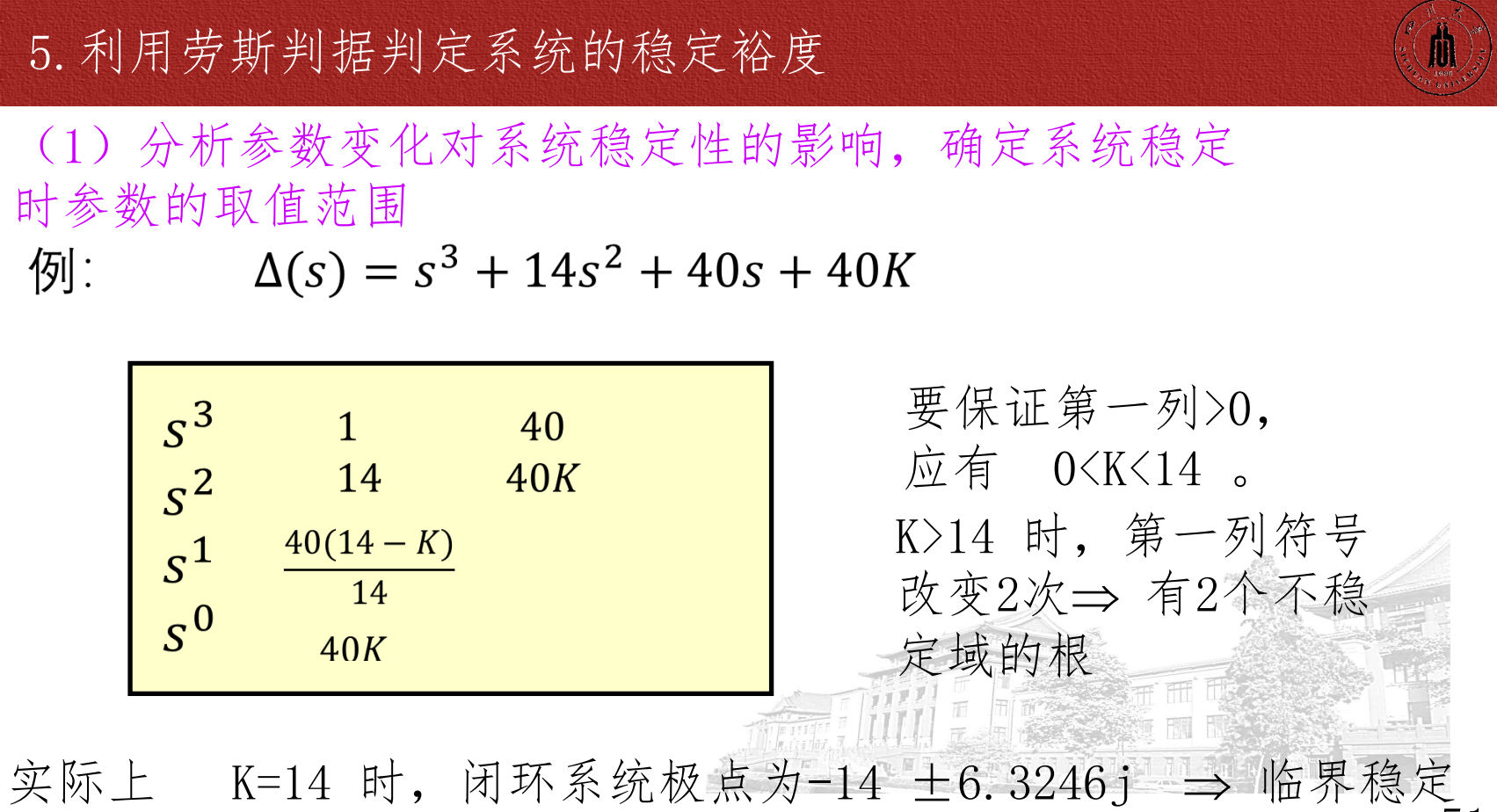
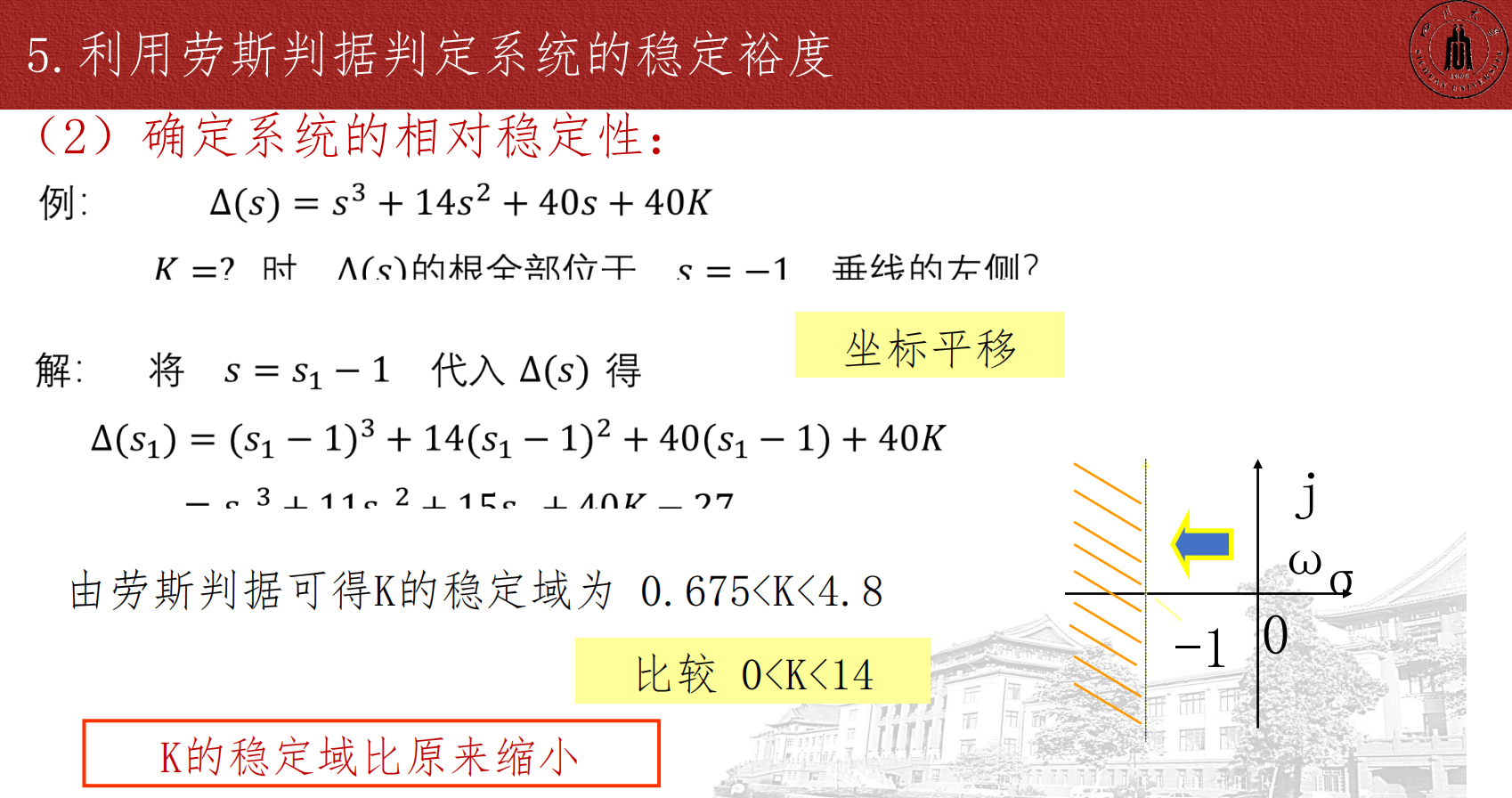
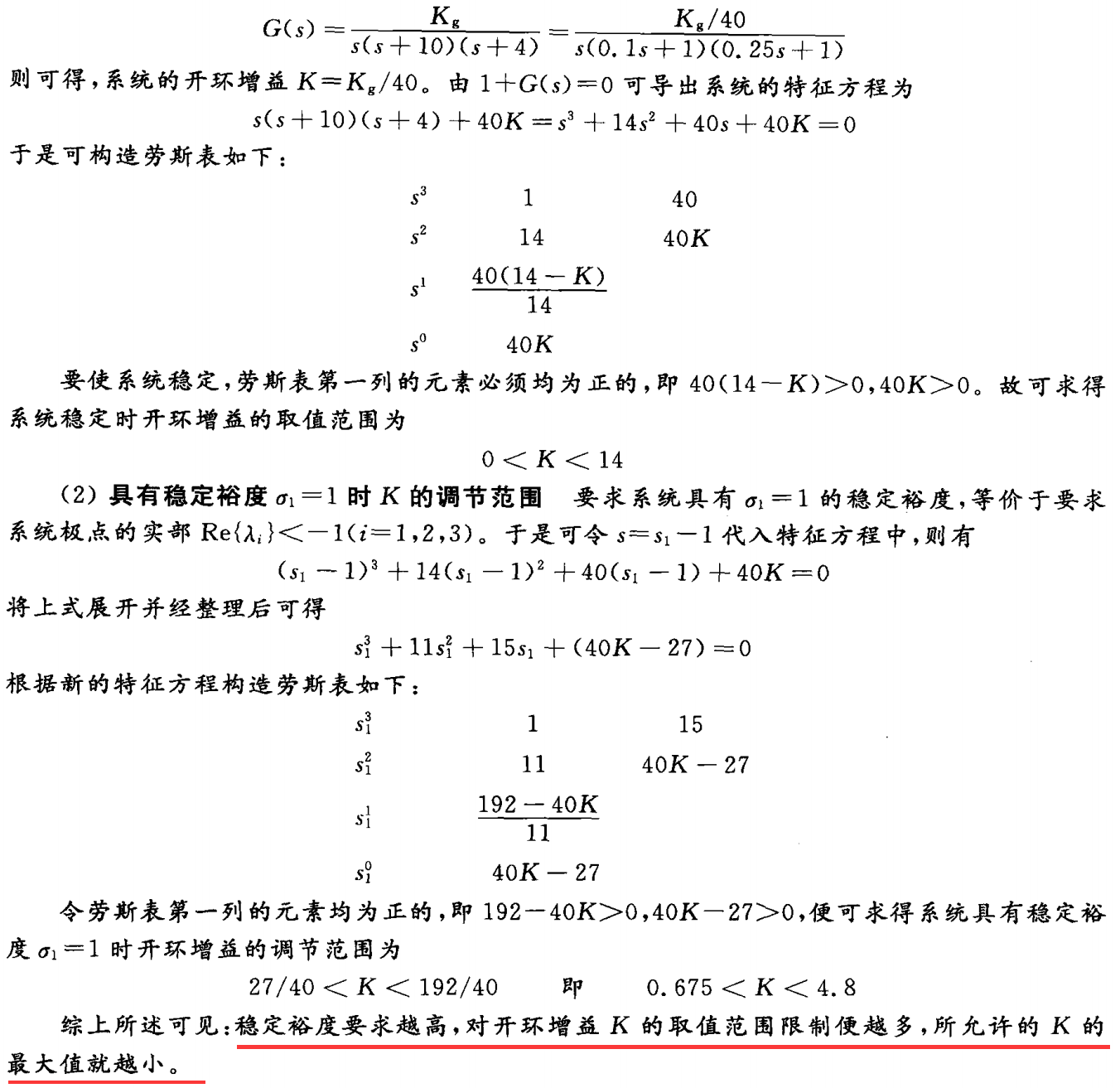
(Ⅰ)分析参数变化对系统稳定性的影响,确定系统稳定时参数的取值范围(即参数的稳定域)。方法:把参数k、σ、……带入劳斯表,取第一列为正,建立不等式。
工程上并不满足于一个控制系统仅仅在某一组给定的参数值下是稳定的。因为实际系统不可避免地存在着扰动和不确定性因素的影响(如建模的不精确性、环境条件变化、元器件的制造误差以及运行时老化等),造成参数产生偏移。
故要求参数有一定的稳定域,当参数在一定范围内变化时系统仍能稳定和有效地工作。
(Ⅱ)确定系统的相对稳定性。方法:换元
,确定新的系数方程,建立新表。
在工程上不仅要求控制系统必须是稳定的,而且还要求它具有足够的稳定裕度,使系统能可靠地稳定工作。
这就是说:
- 我们不仅需要确定系统极点是否都落在S的左半开平面上,从而判断系统的稳定性;
- 而且还需要了解系统稳定的“程度”(即稳定的裕度)。
通常称:
- 前者为系统的绝对稳定性问题(例3.13~例3.16所介绍的就是用劳斯判据来确定系统的绝对稳定性问题);
- 后者为系统的相对稳定性问题。若系统的稳定裕度越大,则系统的相对稳定性就越好。
从不同的角度着眼,相对稳定性有几种不同的定义方法,后面我们将陆续地加以介绍。
这里介绍的是:用极点与虚轴的距离来定义系统的相对稳定性,并采用系统极点与虚轴的最小距离σ来表示系统的稳定裕度。
- 显然σ越大稳定的裕度便越高,系统的相对稳定性就越好。
- 所谓系统具有σ1的稳定裕度是指,系统的所有极点均分布在S平面的s = -σ1垂直线的左侧,如图3.11所示。
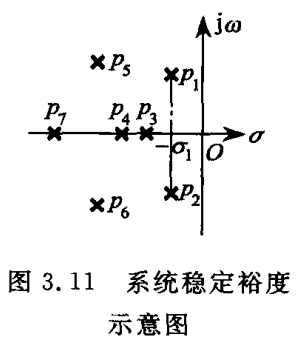
可以将劳斯判据推广,用来判断系统是否具有σ1的稳定裕度。
其具体做法是:首先通过坐标平移变换,将S平面的纵轴往左平移σ1,即令![]()
并代入特征方程中,得到以s1为变量的新的特征方程;然后对这个新特征方程应用劳斯判据进行判别。
- 若劳斯表第一列元素不变号,则系统具有σ1的稳定裕度;
- 若第一列元素变了号,则系统不具有σ1的稳定裕度,并且其符号改变的次数就等于分布在s=-σ1垂直线右侧极点的个数;
- 若第一列的元素不变号但出现了全为0元素的行,当辅助方程的根均分布在s=-σ1的垂直线上时,则系统具有临界的σ1稳定裕度,否则系统便不具有σ1的稳定裕度。
而且还可确定满足稳定裕度要求时,系统参数的取值范围。

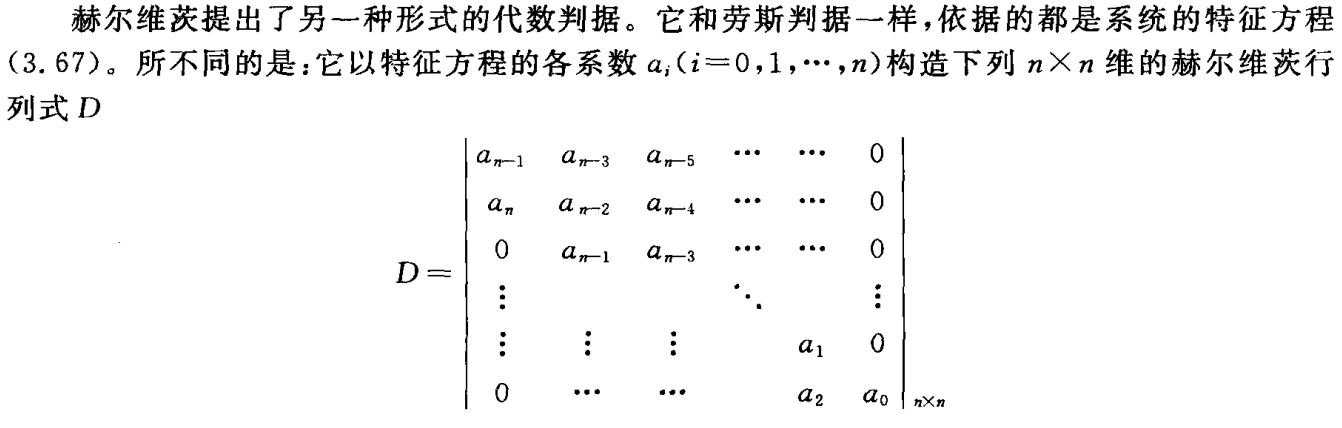
(3)赫尔维茨判据
3.4.4 李雅普诺夫第一方法
……
PPT课件
【稳定性的定义】:收敛的,而非发散的。

【结论】特征多项式
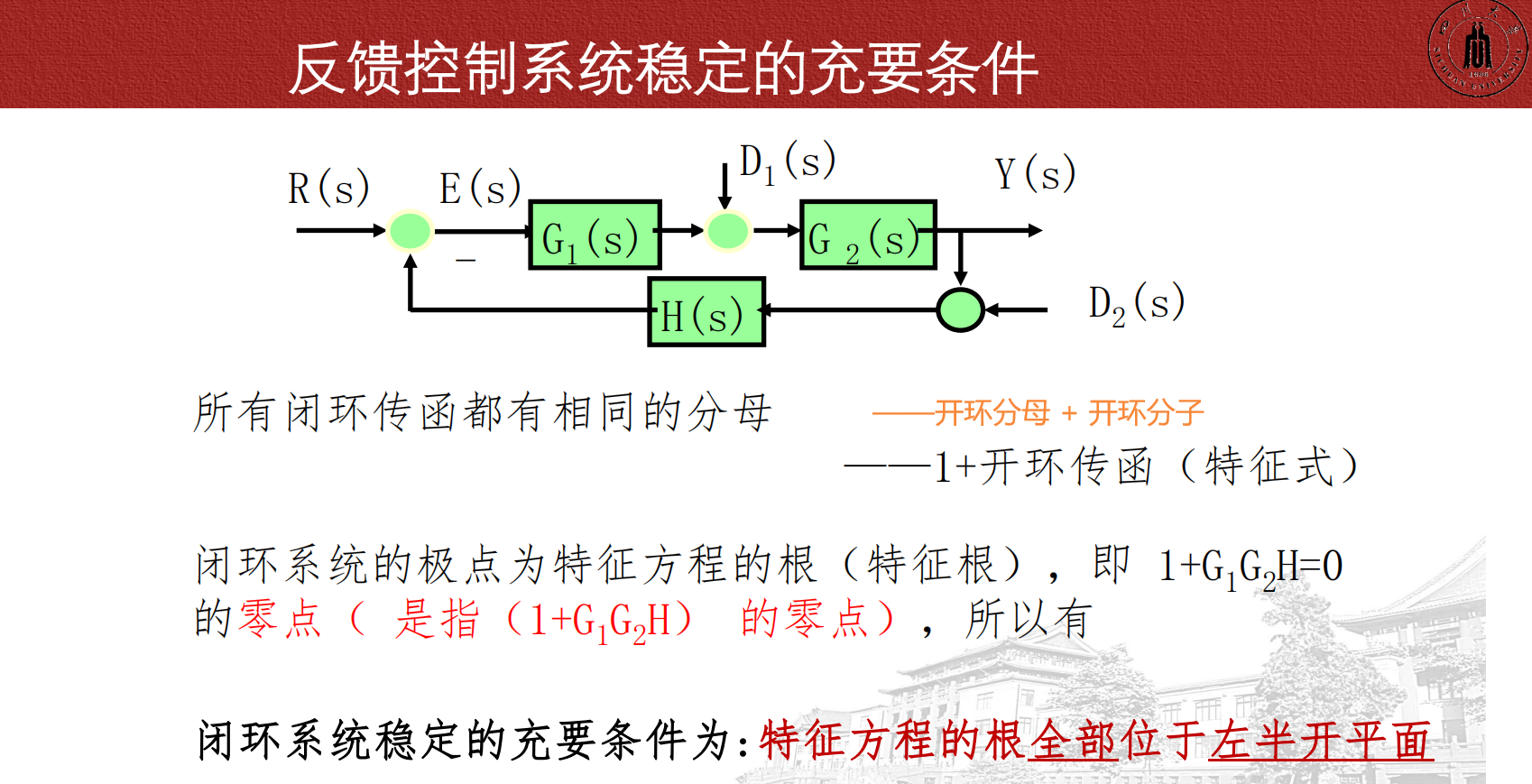
- 零状态响应:对于输入R(s)、D(s)、的输出Y(s)、E(s),它们的闭环传递函数的分母相同。
- 对于零状态响应、零输入响应:它们的闭环传递函数的分母相同。
【稳定性分析】
一般系统(特征多项式是普通幂级数)
- 法①:特征方程的根(低阶系统:一阶、二阶)
- 法②:劳斯判据(高阶系统)
含延迟环节
(时滞环节)的系统(特征多项式含超越函数)
- 法①:劳斯判据(超越函数·幂级数展开(泰勒展开))
- 法②:奈奎斯特判据