计算机图形学:【Games101】学习笔记02——变换(二维与三维、模型、视图、投影)
计算机图形学:【Games101】学习笔记02——变换(二维与三维、模型、视图、投影)
- 前言
- 一、变换(二维与三维)
- 1.1 为什么要学图形变换?(Why Transformation?)
- 1.2 2D基本变换:旋转、缩放、剪切(线性变换)
- 1.2.1 缩放变换(Scale)
- 1.2.2 剪切变换(Shear)
- 1.2.3 旋转变换(Rotation)
- 1.2.4 线性变换的共性(Linear Transforms = Matrices)
- 1.3 齐次坐标:解决平移的 “特殊问题”
- 1.3.1 2D 齐次坐标的定义(Homogeneous Coordinates)
- 1.3.2 用齐次坐标表示平移
- 1.3.3 统一所有 2D 变换
- 1.4 变换组合:多个变换的叠加
- 1.4.1 变换顺序的影响:先平移再旋转 vs 先旋转再平移
- 1.4.2 提升变换组合的效率:预乘矩阵
- 1.4.3 复杂变换的分解
- 1.5 3D 变换基础:扩展齐次坐标
- 1.5.1 3D 齐次坐标的定义
- 1.5.2 3D 仿射变换的矩阵表示
- 二、变换(模型、视图、投影)
- 2.1 3D变换进阶(3D Transformations)
- 2.2 3D 旋转进阶:从轴旋转到任意旋转
- 2.2.1 欧拉角(Euler Angles)
- 2.2.2 罗德里格斯公式(Rodrigues’ Rotation Formula)
- 2.3 视图变换(View / Camera Transformation):把相机 “摆到正确位置”
- 2.4 投影变换(Projection Transformation):3D 到 2D 的 “拍照” 过程
- 2.4.1 正交投影(Orthographic Projection)
- 2.4.2 透视投影(Perspective Projection)
- 三、疑难点整理总结
- 写在最后
前言
- 🎮 GAMES101 是国内相当有名的图形学公开课。项目相关资源在:https://sites.cs.ucsb.edu/~lingqi/teaching/games101.html。
- 本 📒笔记为 🖊️笔者在自学过程中整理的 🇨🇳中文版笔记,供各位 📖读者阅读 😼~
- 图形变换是计算机图形学的 “核心操作”—— 无论是游戏中角色的移动、电影中镜头的切换,还是 3D 模型到 2D 屏幕的投影,本质都是通过变换实现的。本章聚焦 2D 基本变换、齐次坐标(解决平移的矩阵表示问题)、变换组合,以及 3D 变换的基础,内容紧密衔接上一讲的线性代数知识,下面逐模块梳理。
一、变换(二维与三维)
1.1 为什么要学图形变换?(Why Transformation?)
没有变换,就无法 “操作” 和 “观察” 虚拟物体:
- 建模(Modeling):构建与调整虚拟物体建模是创建 3D 场景的过程,变换用于调整物体的位置、姿态和大小:
- 平移(Translation):将物体从一个位置移动到另一个位置(如游戏中角色向前走);
- 旋转(Rotation):改变物体的朝向(如角色转身、车轮转动);
- 缩放(Scaling):放大或缩小物体(如近大远小的视觉效果,或调整模型尺寸以匹配场景)。
- 视图(Viewing):从 3D 到 2D 的投影
- 我们最终看到的屏幕画面是 2D 的,视图变换用于将 3D 场景 “投影” 到 2D 屏幕上:
- 核心逻辑:模拟人眼或相机的 “观察过程”—— 从 3D 世界中的观察点出发,将物体投射到 2D 成像平面,形成最终的图像;
- 本质:是一种特殊的 3D 到 2D 的变换。
1.2 2D基本变换:旋转、缩放、剪切(线性变换)
2D 变换是图形变换的基础,首先介绍 “线性变换”—— 可通过2×2 矩阵表示的变换(满足 “可加性” 和 “齐次性”),包括缩放、剪切、旋转。
1.2.1 缩放变换(Scale)
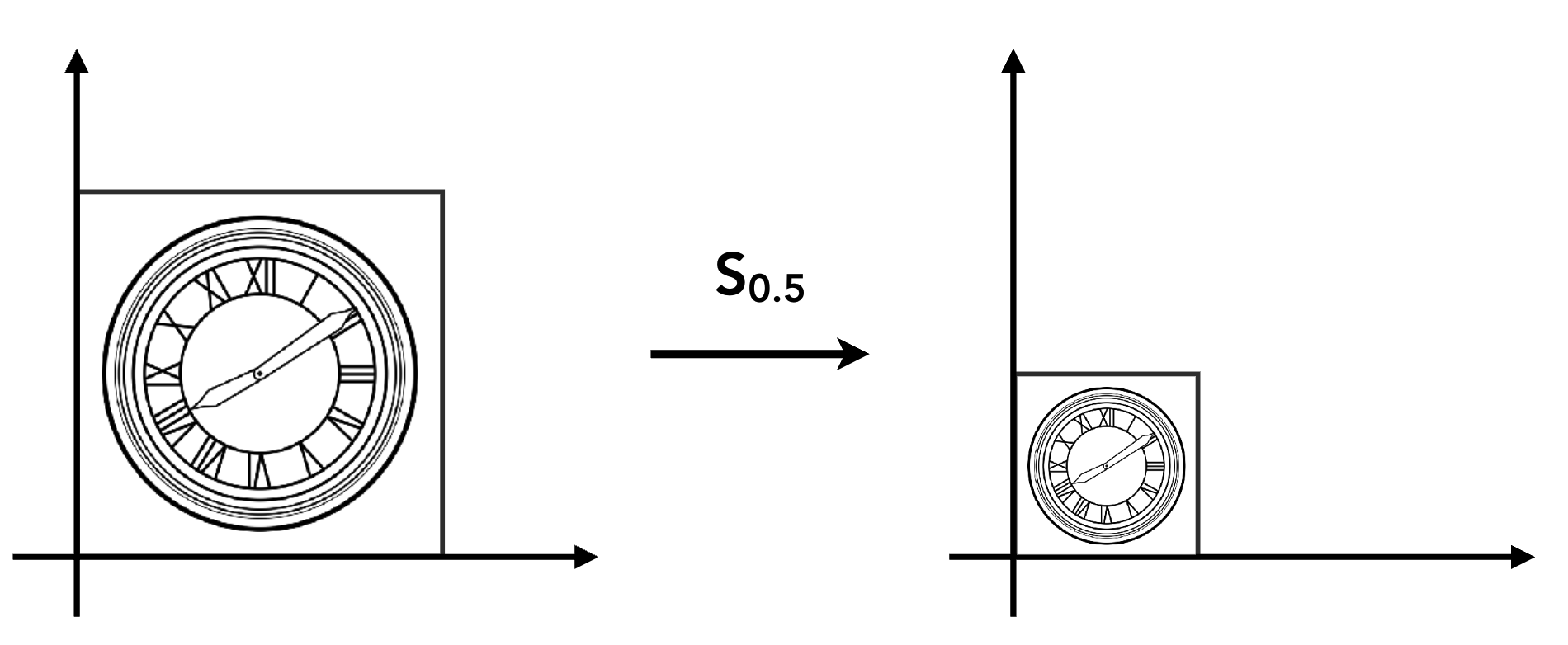
缩放变换通过改变物体在 x 轴和 y 轴方向的尺寸实现,分为 “均匀缩放” 和 “非均匀缩放”。
- 均匀缩放:x 轴和 y 轴缩放系数相同(如整体放大 2 倍、缩小为 0.5 倍);
- 公式(2D 点 (x,y)(x,y)(x,y) 经缩放后变为 (x′,y′)(x',y')(x′,y′) ):x′=s⋅xx' = s \cdot xx′=s⋅x,y′=s⋅yy' = s \cdot yy′=s⋅y(s为缩放系数);
- 矩阵表示:[x′y′]=[s00s][xy]\begin{bmatrix} x' \\ y' \end{bmatrix} = \begin{bmatrix} s & 0 \\ 0 & s \end{bmatrix} \begin{bmatrix} x \\ y \end{bmatrix}[x′y′]=[s00s][xy];
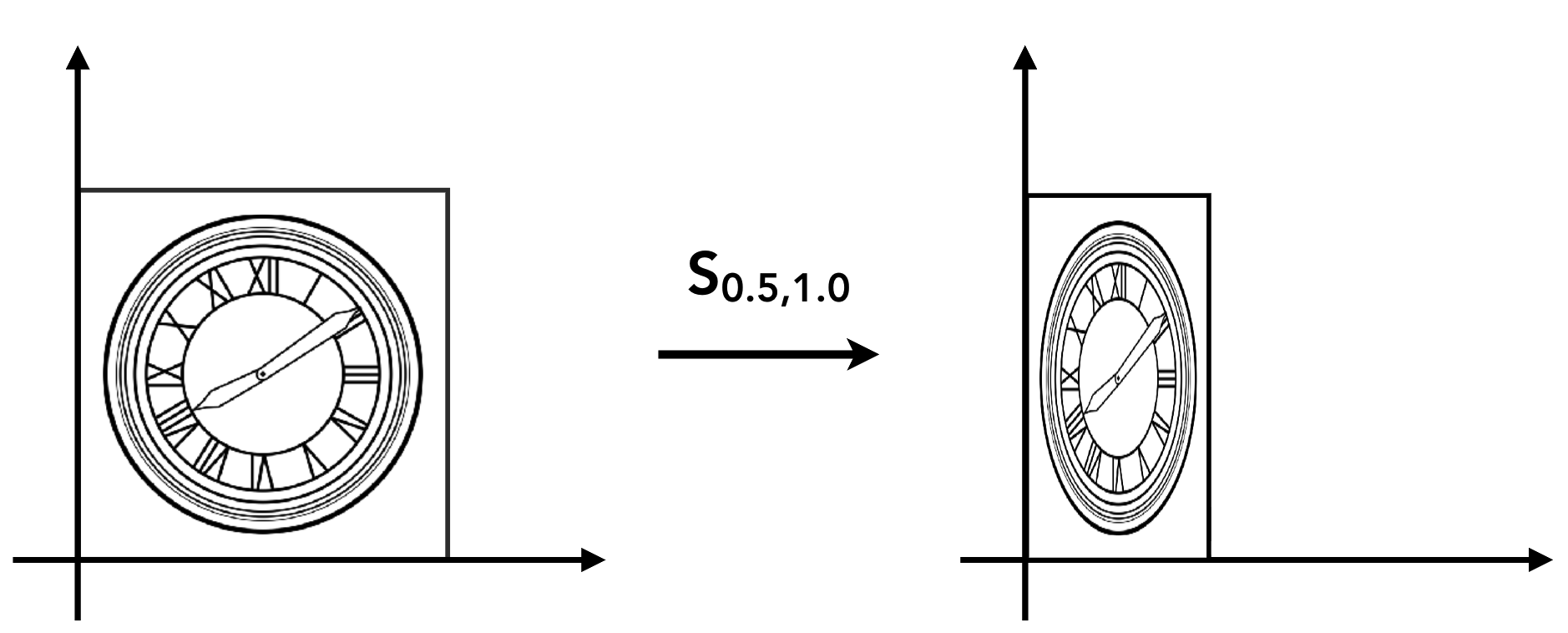
- 非均匀缩放:x 轴和 y 轴缩放系数不同(如 x 轴缩为 0.5 倍,y 轴保持不变);
- 公式:x′=sx⋅xx' = s_x \cdot xx′=sx⋅x,y′=sy⋅yy' = s_y \cdot yy′=sy⋅y(sxs_xsx 为 x 轴系数,sys_ysy 为 y 轴系数);
- 矩阵表示:[x′y′]=[sx00sy][xy]\begin{bmatrix} x' \\ y' \end{bmatrix} = \begin{bmatrix} s_x & 0 \\ 0 & s_y \end{bmatrix} \begin{bmatrix} x \\ y \end{bmatrix}[x′y′]=[sx00sy][xy];
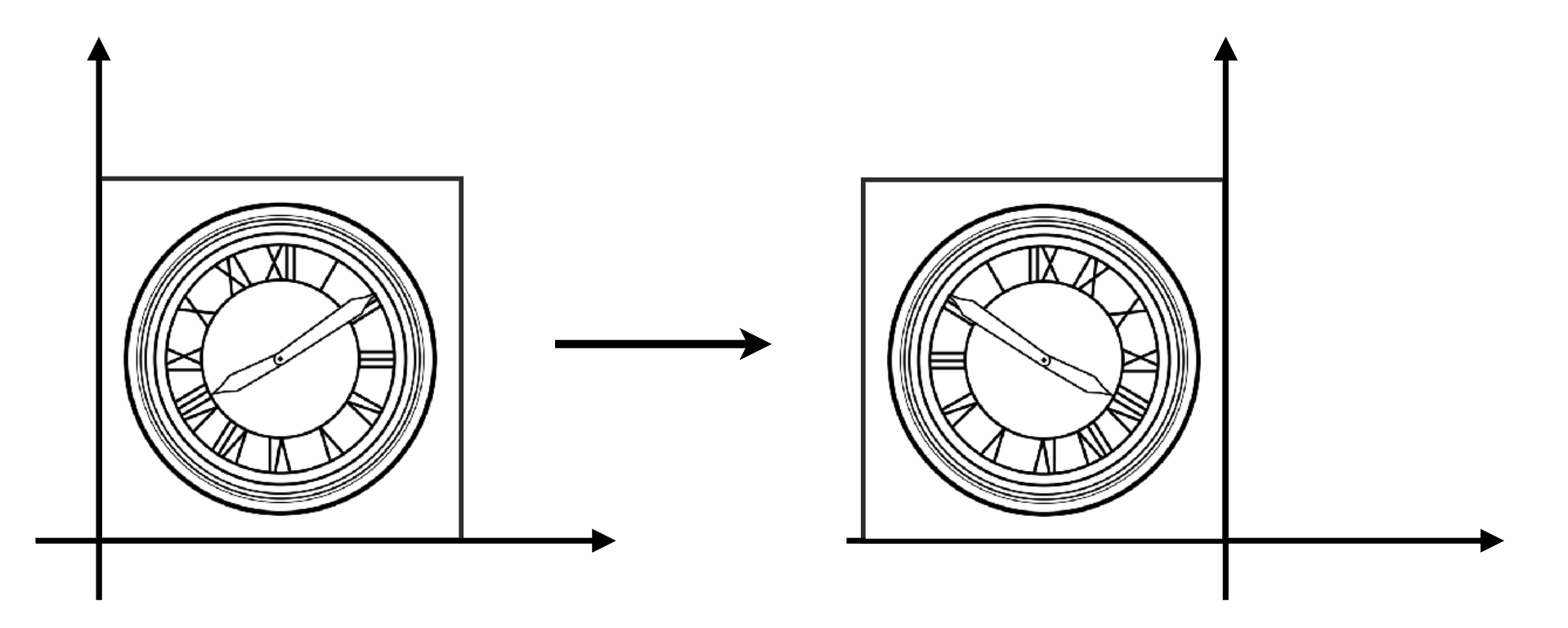
- 特殊情况:反射(Reflection):可视为 “负缩放”,如 x 轴反射(sx=−1,sy=1s_x=-1,s_y=1sx=−1,sy=1),矩阵为 [−1001]\begin{bmatrix} -1 & 0 \\ 0 & 1 \end{bmatrix}[−1001],效果是物体关于 y 轴对称。
1.2.2 剪切变换(Shear)
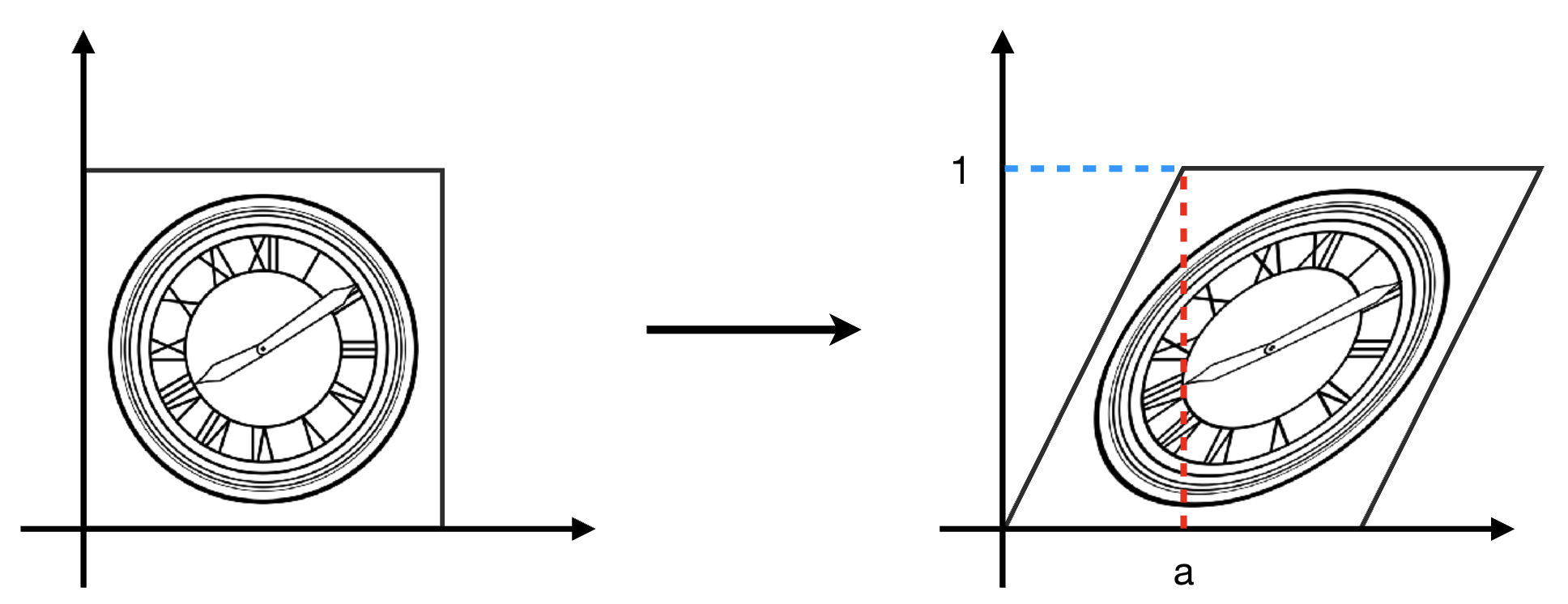
剪切变换使物体沿某一轴方向发生倾斜,常用的是 “水平剪切”(x 轴随 y 轴变化)。
- 水平剪切逻辑:y=0 处的点不移动,y=1 处的点沿 x 轴平移a个单位,中间点按比例平移;
- 公式:x′=x+a⋅yx' = x + a \cdot yx′=x+a⋅y,y′=yy' = yy′=y(a为剪切系数);
- 矩阵表示:[x′y′]=[1a01][xy]\begin{bmatrix} x' \\ y' \end{bmatrix} = \begin{bmatrix} 1 & a \\ 0 & 1 \end{bmatrix} \begin{bmatrix} x \\ y \end{bmatrix}[x′y′]=[10a1][xy];
- 示例:若 a=1,则点 (0,1) 变为 (1,1),点 (1,1) 变为 (2,1),正方形会变成平行四边形。
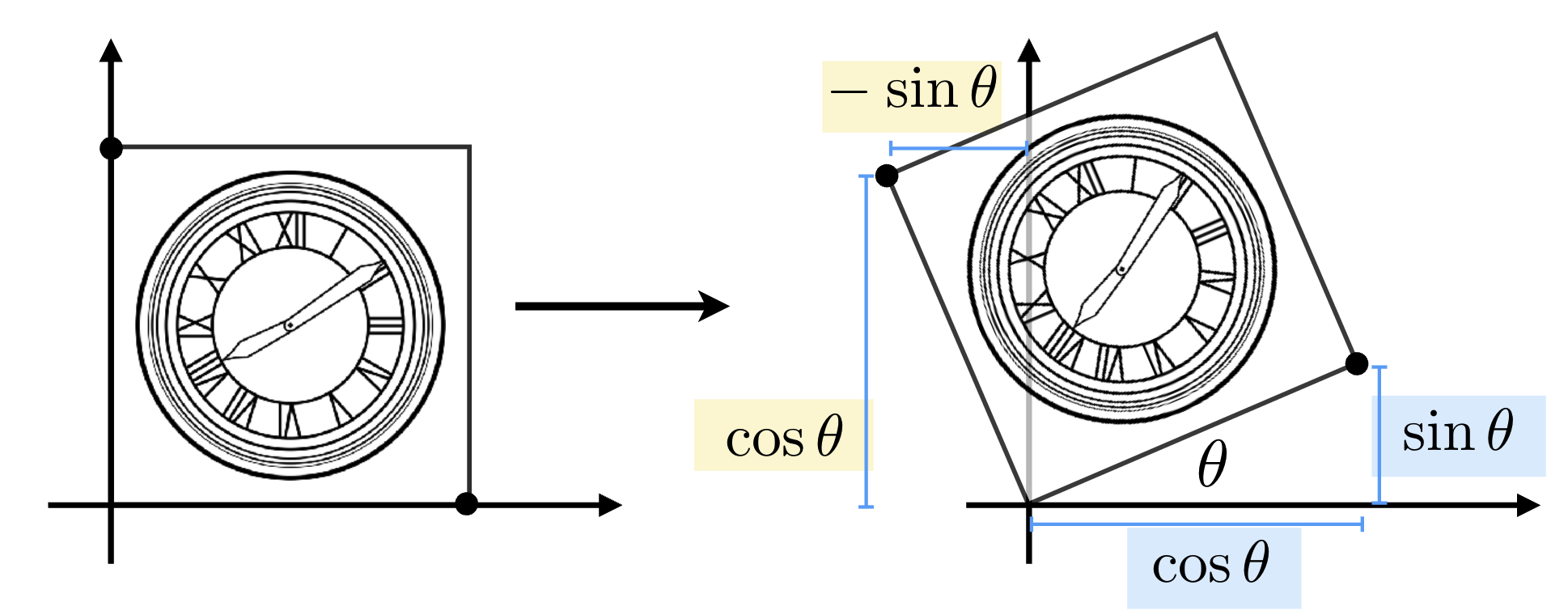
1.2.3 旋转变换(Rotation)
默认情况下,旋转变换是 “绕坐标原点(0,0)逆时针旋转 α\alphaα 角”,是图形学中最常用的变换之一。
公式推导:基于三角函数的投影 —— 设原向量长度为r,与 x 轴夹角为 θ\thetaθ,旋转后夹角变为 θ+α\theta+\alphaθ+α,则:
- x′=r⋅cos(θ+α)=rcosθcosα−rsinθsinα=xcosα−ysinαx' = r \cdot \cos(\theta+\alpha) = r\cos\theta\cos\alpha - r\sin\theta\sin\alpha = x\cos\alpha - y\sin\alphax′=r⋅cos(θ+α)=rcosθcosα−rsinθsinα=xcosα−ysinα;
- y′=r⋅sin(θ+α)=rsinθcosα+rcosθsinα=xsinα+ycosαy' = r \cdot \sin(\theta+\alpha) = r\sin\theta\cos\alpha + r\cos\theta\sin\alpha = x\sin\alpha + y\cos\alphay′=r⋅sin(θ+α)=rsinθcosα+rcosθsinα=xsinα+ycosα;
矩阵表示:[x′y′]=[cosα−sinαsinαcosα][xy]\begin{bmatrix} x' \\ y' \end{bmatrix} = \begin{bmatrix} \cos\alpha & -\sin\alpha \\ \sin\alpha & \cos\alpha \end{bmatrix} \begin{bmatrix} x \\ y \end{bmatrix}[x′y′]=[cosαsinα−sinαcosα][xy];
注意:若要顺时针旋转,只需将 α\alphaα 替换为 −α-\alpha−α(利用 cos(−α)=cosα\cos(-\alpha)=\cos\alphacos(−α)=cosα, sin(−α)=−sinα\sin(-\alpha)=-\sin\alphasin(−α)=−sinα,矩阵变为 [cosαsinα−sinαcosα]\begin{bmatrix} \cos\alpha & \sin\alpha \\ -\sin\alpha & \cos\alpha \end{bmatrix}[cosα−sinαsinαcosα])。
1.2.4 线性变换的共性(Linear Transforms = Matrices)
上述缩放、剪切、旋转均为线性变换,满足两个核心性质:
- 可加性:T(a⃗+b⃗)=T(a⃗)+T(b⃗)T(\vec{a} + \vec{b}) = T(\vec{a}) + T(\vec{b})T(a+b)=T(a)+T(b);
- 齐次性:T(ka⃗)=kT(a⃗T(k\vec{a}) = kT(\vec{a}T(ka)=kT(a(k为标量);
- 矩阵表示:所有 2D 线性变换都可通过 2×2 矩阵表示,形式为 [abcd]\begin{bmatrix} a & b \\ c & d \end{bmatrix}[acbd],变换结果为 [x′y′]=[abcd][xy]\begin{bmatrix} x' \\ y' \end{bmatrix} = \begin{bmatrix} a & b \\ c & d \end{bmatrix} \begin{bmatrix} x \\ y \end{bmatrix}[x′y′]=[acbd][xy]。
1.3 齐次坐标:解决平移的 “特殊问题”
线性变换能表示旋转、缩放、剪切,但无法表示平移—— 这是图形学中的一个关键 “痛点”,而齐次坐标是解决该问题的 “统一方案”。
- 平移的问题:不是线性变换
- 平移的公式是 x′=x+txx' = x + t_xx′=x+tx,y′=y+tyy' = y + t_yy′=y+ty(tx,tyt_x,t_ytx,ty 为 x、y 轴方向的平移量),显然不满足线性变换的性质(如 T(a⃗+b⃗)=T(a⃗)+T(b⃗)T(\vec{a} + \vec{b}) = T(\vec{a}) + T(\vec{b})T(a+b)=T(a)+T(b) 不成立),因此无法用 2×2 矩阵表示:
- 若强行用矩阵表示,只能写成 “矩阵乘法 + 向量加法” 的形式:[x′y′]=[abcd][xy]+[txty]\begin{bmatrix} x' \\ y' \end{bmatrix} = \begin{bmatrix} a & b \\ c & d \end{bmatrix} \begin{bmatrix} x \\ y \end{bmatrix} + \begin{bmatrix} t_x \\ t_y \end{bmatrix}[x′y′]=[acbd][xy]+[txty];
- 问题:平移成了 “特殊情况”,无法与其他线性变换统一用矩阵乘法表示,不利于后续组合变换。
1.3.1 2D 齐次坐标的定义(Homogeneous Coordinates)
齐次坐标:增加一个额外的坐标(w 坐标),将 2D 点 / 向量表示为 3 维形式,从而用(3×3)矩阵统一表示所有变换(包括平移)。
- 2D 点:表示为 (x,y,1)T(x, y, 1)^T(x,y,1)T(w=1);
- 2D 向量:表示为 (x,y,0)T(x, y, 0)^T(x,y,0)T(w=0);
- 意义:通过 w 坐标区分 “点” 和 “向量”,且满足以下运算规则(符合直觉):
- 向量 + 向量 = 向量:(x1,y1,0)T+(x2,y2,0)T=(x1+x2,y1+y2,0)T(x1,y1,0)^T + (x2,y2,0)^T = (x1+x2, y1+y2, 0)^T(x1,y1,0)T+(x2,y2,0)T=(x1+x2,y1+y2,0)T;
- 点 - 点 = 向量:(x1,y1,1)T−(x2,y2,1)T=(x1−x2,y1−y2,0)T(x1,y1,1)^T - (x2,y2,1)^T = (x1-x2, y1-y2, 0)^T(x1,y1,1)T−(x2,y2,1)T=(x1−x2,y1−y2,0)T;
- 点 + 向量 = 点: (x1,y1,1)T+(x2,y2,0)T=(x1+x2,y1+y2,1)T(x1,y1,1)^T + (x2,y2,0)^T = (x1+x2, y1+y2, 1)^T(x1,y1,1)T+(x2,y2,0)T=(x1+x2,y1+y2,1)T。
1.3.2 用齐次坐标表示平移
- 引入齐次坐标后,平移可通过 3×3 矩阵表示:平移公式的矩阵形式:[x′y′1]=[10tx01ty001][xy1]\begin{bmatrix} x' \\ y' \\ 1 \end{bmatrix} = \begin{bmatrix} 1 & 0 & t_x \\ 0 & 1 & t_y \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x \\ y \\ 1 \end{bmatrix}x′y′1=100010txty1xy1;
- 验证:展开后为 x′=1⋅x+0⋅y+tx=x+tx,y′=0⋅x+1⋅y+ty=y+tyx' = 1·x + 0·y + t_x = x + t_x,y' = 0·x + 1·y + t_y = y + t_yx′=1⋅x+0⋅y+tx=x+tx,y′=0⋅x+1⋅y+ty=y+ty,完全符合平移公式。
1.3.3 统一所有 2D 变换
此时,缩放、旋转、剪切也可升级为 3×3 矩阵,与平移统一:
- 缩放(Scale):S(sx,sy)=[1a0010001]S(s_x,s_y) = \begin{bmatrix} 1 & a & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix}S(sx,sy)=100a10001
- 旋转(Rotation):R(α)=[sx000sy0001]R(\alpha) = \begin{bmatrix} s_x & 0 & 0 \\ 0 & s_y & 0 \\ 0 & 0 & 1 \end{bmatrix}R(α)=sx000sy0001
- 平移(Translation):T(tx,ty)=[10tx01ty001]T(t_x,t_y) = \begin{bmatrix} 1 & 0 & t_x \\ 0 & 1 & t_y \\ 0 & 0 & 1 \end{bmatrix}T(tx,ty)=100010txty1
这种 “线性变换 + 平移” 的组合,称为仿射变换(Affine Transformation) —— 齐次坐标的核心价值就是将仿射变换统一为单一矩阵乘法。
1.4 变换组合:多个变换的叠加
实际场景中,物体的运动往往是 “多个变换的叠加”(如 “先平移再旋转”“先缩放再平移”),变换组合的核心是矩阵乘法,但需特别注意 “变换顺序”—— 矩阵乘法不满足交换律,顺序不同结果完全不同。
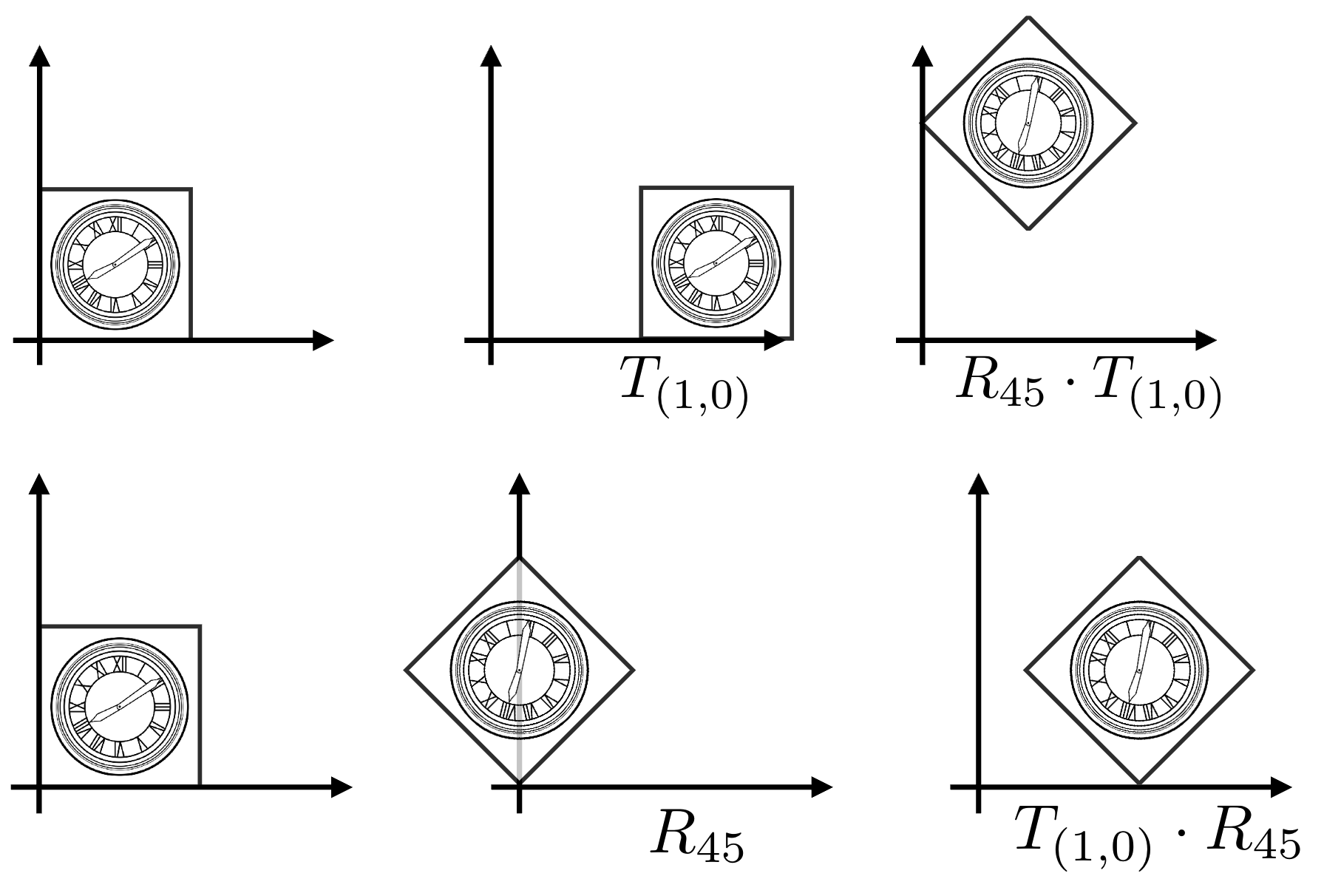
1.4.1 变换顺序的影响:先平移再旋转 vs 先旋转再平移
- 以 “点 (0,0) 先沿 x 轴平移 1 单位( T(1,0) ),再逆时针旋转 45°( R(45°) )” 与 “先旋转再平移” 为例:
- 先平移再旋转:变换矩阵为 R(45°)⋅T(1,0)R(45°) \cdot T(1,0)R(45°)⋅T(1,0)(矩阵乘法从右到左执行,即先算右侧的平移,再算左侧的旋转);计算:T(1,0) 将 (0,0) 变为 (1,0),再经 R(45°) 旋转,结果为 cos45°,sin45°)≈(0.707,0.707)\cos45°, \sin45°) \approx (0.707, 0.707)cos45°,sin45°)≈(0.707,0.707);
- 先旋转再平移:变换矩阵为 T(1,0)⋅R(45°)T(1,0) \cdot R(45°)T(1,0)⋅R(45°)(先旋转,再平移);计算:R(45°) 将 (0,0) 变为 (0,0) ,再经 T(1,0) 平移,结果为 (1,0);
- 结论:R(45°)⋅T(1,0)≠T(1,0)⋅R(45°)R(45°) \cdot T(1,0) \neq T(1,0) \cdot R(45°)R(45°)⋅T(1,0)=T(1,0)⋅R(45°),变换顺序必须严格遵循 “右到左” 的执行逻辑(矩阵在左,变换在后;矩阵在右,变换在前)。
1.4.2 提升变换组合的效率:预乘矩阵
若要对多个点执行相同的 “变换序列”(如场景中所有物体都执行 “缩放→旋转→平移”),直接逐个点执行多次变换会很耗时,高效做法是预乘所有变换矩阵:
- 逻辑:设变换序列为 A1,A2,...,AnA_1, A_2, ..., A_nA1,A2,...,An(依次执行 A1A_1A1 到 AnA_nAn),则组合变换矩阵为M=An⋅...⋅A2⋅A1M = A_n \cdot ... \cdot A_2 \cdot A_1M=An⋅...⋅A2⋅A1;
- 优势:只需计算一次M,后续每个点只需与M做一次矩阵乘法,即可完成所有变换,大幅提升效率;
- 公式:An(...A2(A1(p⃗)))=M⋅p⃗A_n(...A_2(A_1(\vec{p}))) = M \cdot \vec{p}An(...A2(A1(p)))=M⋅p( p⃗\vec{p}p 为点的齐次坐标)。
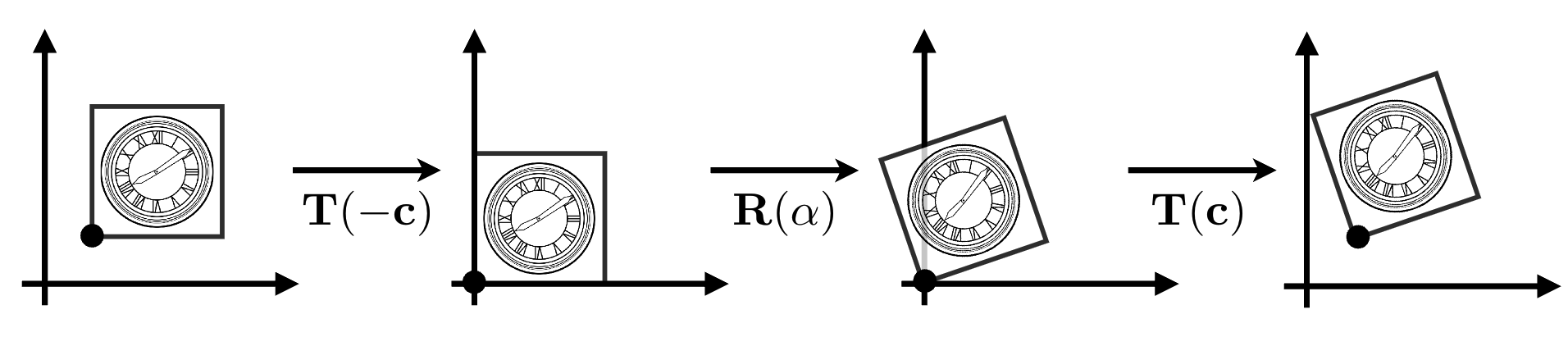
1.4.3 复杂变换的分解
以 “绕任意点 c(cx,cy)c(c_x,c_y)c(cx,cy) 旋转 α\alphaα 角” 为例,这类复杂变换可分解为 3 个基本变换的组合:
- 平移 1:将旋转中心c平移到原点(抵消c的位置),变换矩阵 T(−c)=[10−cx01−cy001]T(-c) = \begin{bmatrix} 1 & 0 & -c_x \\ 0 & 1 & -c_y \\ 0 & 0 & 1 \end{bmatrix}T(−c)=100010−cx−cy1;
- 旋转:绕原点旋转 α\alphaα 角,变换矩阵 R(α)R(\alpha)R(α);
- 平移 2:将旋转中心从原点平移回c,变换矩阵 T(c)=[10cx01cy001]T(c) = \begin{bmatrix} 1 & 0 & c_x \\ 0 & 1 & c_y \\ 0 & 0 & 1 \end{bmatrix}T(c)=100010cxcy1;
- 组合矩阵:M=T(c)⋅R(α)⋅T(−c)M = T(c) \cdot R(\alpha) \cdot T(-c)M=T(c)⋅R(α)⋅T(−c)(执行顺序:先 T(−c)T(-c)T(−c),再 R(α)R(\alpha)R(α),最后 T(c)T(c)T(c) );
- 本质:将 “绕任意点的变换” 转化为 “绕原点的变换”+“平移补偿”,是图形学中处理复杂变换的通用思路。
1.5 3D 变换基础:扩展齐次坐标
3D 变换是 2D 变换的自然扩展,核心思路仍是 “齐次坐标 + 矩阵乘法”,只是维度从 3 维升级到 4 维。
1.5.1 3D 齐次坐标的定义
- 3D 点:表示为 (x,y,z,1)T(x, y, z, 1)^T(x,y,z,1)T(w=1);
- 3D 向量:表示为 (x,y,z,0)T(x, y, z, 0)^T(x,y,z,0)T(w=0);
- 意义:与 2D 类似,通过 w 坐标区分点和向量,确保运算逻辑正确(如点 + 向量 = 点,点 - 点 = 向量)。
1.5.2 3D 仿射变换的矩阵表示
3D 仿射变换(线性变换 + 平移)通过 4×4 矩阵表示,形式如下:[x′y′z′1]=[abctxdeftyghitz0001][xyz1]\begin{bmatrix} x' \\ y' \\ z' \\ 1 \end{bmatrix} = \begin{bmatrix} a & b & c & t_x \\ d & e & f & t_y \\ g & h & i & t_z \\ 0 & 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x \\ y \\ z \\ 1 \end{bmatrix}x′y′z′1=adg0beh0cfi0txtytz1xyz1;
- 左上 3×3 子矩阵:表示 3D 线性变换(如 3D 旋转、缩放、剪切);
- 右侧 3×1 子矩阵:表示 3D 平移( tx,ty,tzt_x,t_y,t_ztx,ty,tz 分别为 x、y、z 轴的平移量);
- 最下行:固定为 (0,0,0,1) ,确保齐次坐标的 w 分量保持为 1。
二、变换(模型、视图、投影)
2.1 3D变换进阶(3D Transformations)
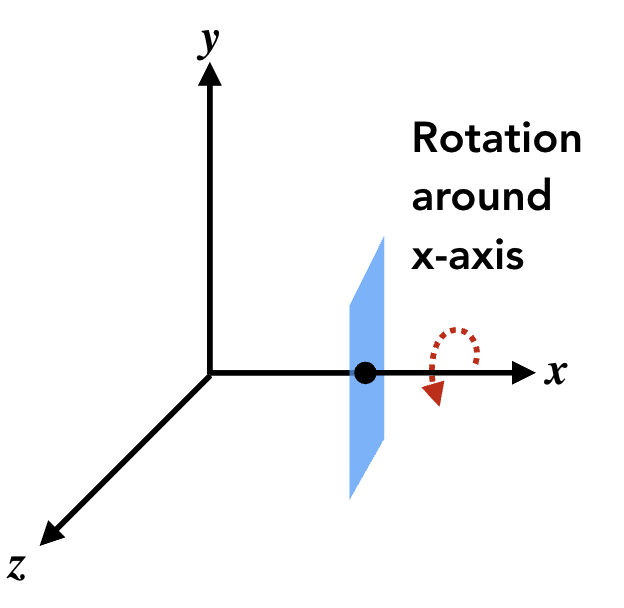
3D 旋转比 2D 复杂,因为 3D 空间中有 3 个旋转轴(x、y、z 轴),且绕不同轴的旋转矩阵不同:
- 绕 x 轴旋转 α\alphaα 角:[10000cosα−sinα00sinαcosα00001]\begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & \cos\alpha & -\sin\alpha & 0 \\ 0 & \sin\alpha & \cos\alpha & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}10000cosαsinα00−sinαcosα00001;
- 绕 y 轴旋转 α\alphaα 角:[cosα0sinα00100−sinα0cosα00001]\begin{bmatrix} \cos\alpha & 0 & \sin\alpha & 0 \\ 0 & 1 & 0 & 0 \\ -\sin\alpha & 0 & \cos\alpha & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}cosα0−sinα00100sinα0cosα00001;
- 绕 z 轴旋转 α\alphaα 角:[cosα−sinα00sinαcosα0000100001]\begin{bmatrix} \cos\alpha & -\sin\alpha & 0 & 0 \\ \sin\alpha & \cos\alpha & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}cosαsinα00−sinαcosα0000100001;
注意:3D 旋转的顺序同样重要,绕不同轴的旋转组合会产生复杂的姿态变化(如欧拉角的万向锁问题)。
2.2 3D 旋转进阶:从轴旋转到任意旋转
上一讲仅介绍了绕 x/y/z 轴的 3D 旋转,而实际场景中物体的旋转往往是 “绕任意方向轴” 的(如游戏中角色的任意姿态调整),这部分将讲解两种核心解决方案:欧拉角与罗德里格斯公式。
2.2.1 欧拉角(Euler Angles)
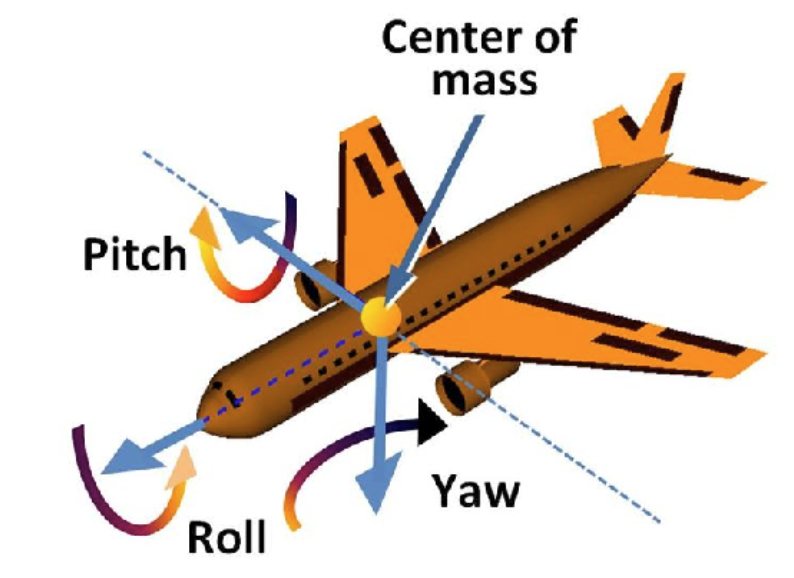
- 核心思想:将任意 3D 旋转分解为 “绕三个正交轴的连续旋转”,通过三个角度(如 roll、pitch、yaw)定义旋转姿态,常见于飞行模拟器、游戏角色控制等场景。
- 三个旋转分量定义(以 “物体自身坐标系” 为例):
- Roll(滚转):绕物体自身 x 轴旋转(如飞机机翼上下倾斜);
- Pitch(俯仰):绕物体自身 y 轴旋转(如飞机抬头或低头);
- Yaw(偏航):绕物体自身 z 轴旋转(如飞机左右转向);
- 矩阵表示:若旋转顺序为 “Roll→Pitch→Yaw”,则组合旋转矩阵为 R=Rz(γ)⋅Ry(β)⋅Rx(α)R = R_z(\gamma) \cdot R_y(\beta) \cdot R_x(\alpha)R=Rz(γ)⋅Ry(β)⋅Rx(α)( α\alphaα 为 roll 角,β\betaβ 为 pitch 角,γ\gammaγ 为 yaw 角),遵循 “右到左” 的变换顺序。
- 欧拉角的问题:万向锁(Gimbal Lock):这是欧拉角的致命缺陷 —— 当第二个旋转角(如 pitch)达到 ±90° 时,第一个和第三个旋转轴会重合,导致 “失去一个旋转自由度”,无法表示某些姿态。
- 示例:当飞机抬头 90°(pitch=90°)时,roll(绕 x 轴)和 yaw(绕 z 轴)会都变成 “绕垂直于地面的轴旋转”,此时无法单独控制机翼倾斜;解决方案:引入 “四元数(Quaternion)。
2.2.2 罗德里格斯公式(Rodrigues’ Rotation Formula)
当需要精确表示 “绕任意方向轴 n⃗\vec{n}n 旋转 α\alphaα 角” 时,欧拉角无法直接使用,罗德里格斯公式提供了简洁的矩阵推导方法。
- 公式形式:设旋转轴为单位向量 n⃗=(nx,ny,nz)T\vec{n} = (n_x, n_y, n_z)^Tn=(nx,ny,nz)T,旋转角为 α\alphaα,则旋转矩阵 R(n⃗,α)R(\vec{n}, \alpha)R(n,α) 为:R(n⃗,α)=cosα⋅I+(1−cosα)⋅n⃗n⃗T+sinα⋅NR(\vec{n}, \alpha) = \cos\alpha \cdot I + (1 - \cos\alpha) \cdot \vec{n}\vec{n}^T + \sin\alpha \cdot NR(n,α)=cosα⋅I+(1−cosα)⋅nnT+sinα⋅N。其中:
- I:3×3 单位矩阵;
- n⃗n⃗T\vec{n}\vec{n}^TnnT:3×3 外积矩阵(由单位向量 n⃗\vec{n}n 构造,结果为对称矩阵),形式为:n⃗n⃗T=[nx2nxnynxnznynxny2nynznznxnznynz2]\vec{n}\vec{n}^T = \begin{bmatrix} n_x^2 & n_xn_y & n_xn_z \\ n_y n_x & n_y^2 & n_y n_z \\ n_z n_x & n_z n_y & n_z^2 \end{bmatrix}nnT=nx2nynxnznxnxnyny2nznynxnznynznz2
- N:n⃗N:\vec{n}N:n 的 “叉积对偶矩阵”,用于计算向量与 n⃗\vec{n}n 的叉积,形式为:N=[0−nznynz0−nx−nynx0]N = \begin{bmatrix} 0 & -n_z & n_y \\ n_z & 0 & -n_x \\ -n_y & n_x & 0 \end{bmatrix}N=0nz−ny−nz0nxny−nx0。
- 公式意义:罗德里格斯公式将 “绕任意轴的旋转” 分解为三个部分的叠加:
- cosα⋅I\cos\alpha \cdot Icosα⋅I:保留原向量在垂直于旋转轴方向的分量;
- (1−cosα)⋅n⃗n⃗T(1 - \cos\alpha) \cdot \vec{n}\vec{n}^T(1−cosα)⋅nnT:将原向量投影到旋转轴上的分量保留;
- sinα⋅N\sin\alpha \cdot Nsinα⋅N:产生绕旋转轴的旋转分量;
2.3 视图变换(View / Camera Transformation):把相机 “摆到正确位置”
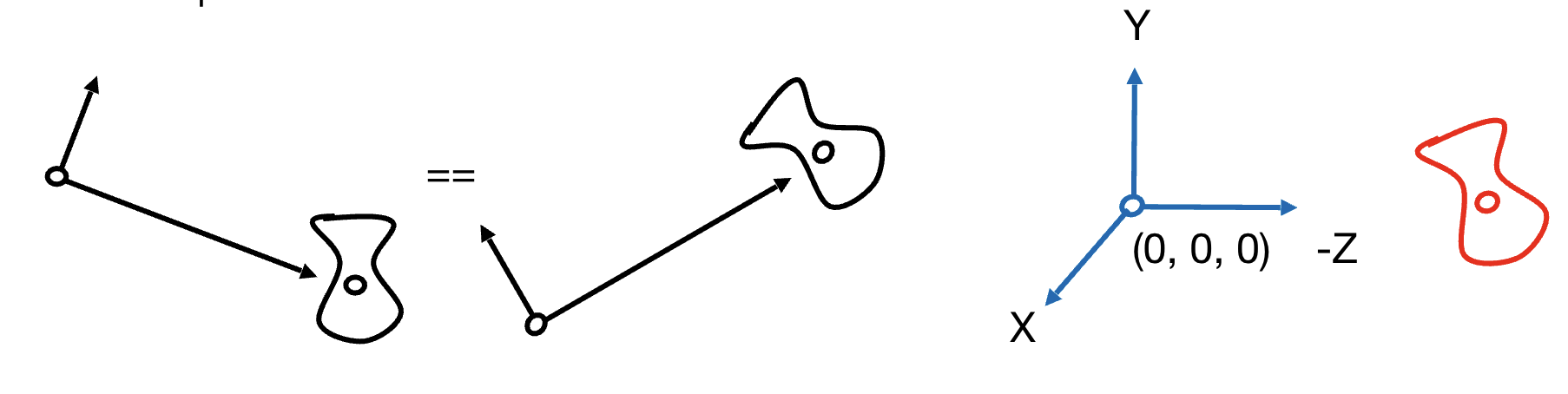
视图变换是 “将 3D 场景转换为相机视角” 的第一步 —— 本质是通过变换让相机和场景一起移动,最终使相机处于 “标准位置”(原点、朝上为 Y 轴、看向 - Z 轴),方便后续投影计算。
1️⃣ 视图变换的直观理解:模拟拍照过程
拍照分为三步,对应图形学中的三类变换:
- 建模变换(Model Transformation):摆放场景中的物体(如调整人物姿势、位置);
- 视图变换(View Transformation):调整相机的位置和角度(找一个好的拍摄角度);
- 投影变换(Projection Transformation):按下快门,将 3D 场景投影为 2D 图像。
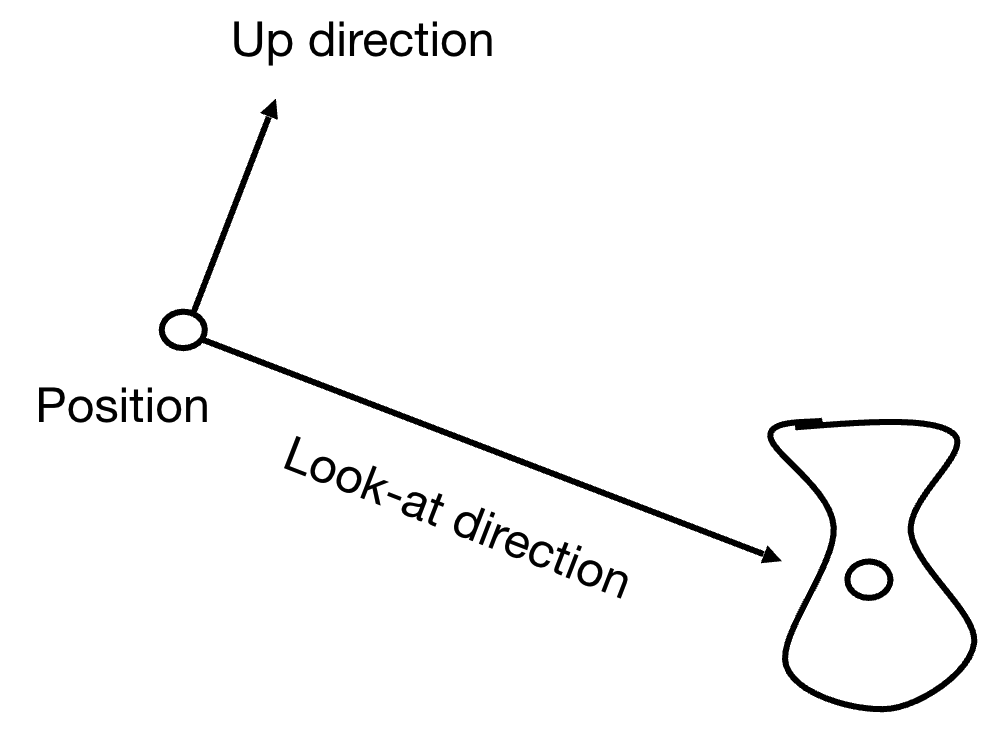
2️⃣ 相机的三个关键参数(定义相机状态)
要执行视图变换,首先需要明确定义相机的初始状态,用三个参数描述:
- 相机位置(Position):记为 e⃗\vec{e}e(相机光心的 3D 坐标);
- 观察方向(Look-at / Gaze Direction):记为 g^\hat{g}g^(从相机指向场景的单位向量,通常指向 - Z 轴方向);
- 朝上方向(Up Direction):记为 t^\hat{t}t^(垂直于观察方向的单位向量,通常指向 Y 轴方向,用于确定相机的 “左右”)。
3️⃣ 视图变换矩阵的推导:两步实现
视图变换分为 “平移” 和 “旋转” 两步,最终矩阵为两步变换的组合(Mview=Rview⋅TviewM_{view} = R_{view} \cdot T_{view}Mview=Rview⋅Tview,先平移后旋转)。
- 第一步:平移相机到原点(TviewT_{view}Tview)
- 将相机位置 e⃗=(xe,ye,ze)\vec{e} = (x_e, y_e, z_e)e=(xe,ye,ze) 平移到原点,场景中的所有点也随之平移相同的向量(抵消相机位置):
- 平移矩阵(4×4 齐次矩阵):Tview=[100−xe010−ye001−ze0001]T_{view} = \begin{bmatrix} 1 & 0 & 0 & -x_e \\ 0 & 1 & 0 & -y_e \\ 0 & 0 & 1 & -z_e \\ 0 & 0 & 0 & 1 \end{bmatrix}Tview=100001000010−xe−ye−ze1
- 效果:相机从 e⃗\vec{e}e 移动到 (0,0,0),场景中任意点 p⃗\vec{p}p 变为 p⃗−e⃗\vec{p} - \vec{e}p−e。
- 第二步:旋转相机到标准方向(RviewR_{view}Rview)
- 旋转的目标是让相机的 “观察方向 g^\hat{g}g^” 指向 - Z 轴、“朝上方向 t^\hat{t}t^” 指向 Y 轴,需要构造一个旋转矩阵 RviewR_{view}Rview。直接构造 RviewR_{view}Rview 较复杂,可通过 “先求逆旋转矩阵 Rview−1R_{view}^{-1}Rview−1 ,再转置(正交矩阵的逆等于转置)” 实现:
- 步骤 1:定义相机的局部坐标系基向量
- 平移后,相机的局部坐标系由三个正交单位向量构成:u^\hat{u}u^(右方向):u^=t^×g^\hat{u} = \hat{t} \times \hat{g}u^=t^×g^(朝上方向叉乘观察方向,确保与两者垂直);v^\hat{v}v^(修正后的朝上方向):v^=g^×u^\hat{v} = \hat{g} \times \hat{u}v^=g^×u^(确保严格垂直于观察方向和右方向);w^\hat{w}w^(观察反方向):w^=−g^\hat{w} = -\hat{g}w^=−g^(指向 - Z 轴,与标准方向一致);
- 步骤 2:构造逆旋转矩阵Rview−1R_{view}^{-1}Rview−1
- Rview−1R_{view}^{-1}Rview−1的作用是 “将标准坐标系(X,Y,-Z)旋转到相机局部坐标系(u^,v^,w^\hat{u},\hat{v},\hat{w}u^,v^,w^)”,矩阵形式为:Rview−1=[u^xu^yu^z0v^xv^yv^z0w^xw^yw^z00001]R_{view}^{-1} = \begin{bmatrix} \hat{u}_x & \hat{u}_y & \hat{u}_z & 0 \\ \hat{v}_x & \hat{v}_y & \hat{v}_z & 0 \\ \hat{w}_x & \hat{w}_y & \hat{w}_z & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}Rview−1=u^xv^xw^x0u^yv^yw^y0u^zv^zw^z00001
- 步骤 3:求RviewR_{view}Rview
- 由于旋转矩阵是正交矩阵(行 / 列向量均为正交单位向量),其逆矩阵等于转置矩阵,因此:Rview=(Rview−1)T=[u^xv^xw^x0u^yv^yw^y0u^zv^zw^z00001]R_{view} = (R_{view}^{-1})^T = \begin{bmatrix} \hat{u}_x & \hat{v}_x & \hat{w}_x & 0 \\ \hat{u}_y & \hat{v}_y & \hat{w}_y & 0 \\ \hat{u}_z & \hat{v}_z & \hat{w}_z & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}Rview=(Rview−1)T=u^xu^yu^z0v^xv^yv^z0w^xw^yw^z00001
- 视图变换的最终效果
- 经过 TviewT_{view}Tview 和 RviewR_{view}Rview 后,相机处于:位置:原点 (0,0,0);观察方向:指向 - Z 轴(w^\hat{w}w^ 方向);朝上方向:指向 Y 轴(v^\hat{v}v^方向);场景中的所有点也完成了对应的变换,为后续投影做好准备。
2.4 投影变换(Projection Transformation):3D 到 2D 的 “拍照” 过程
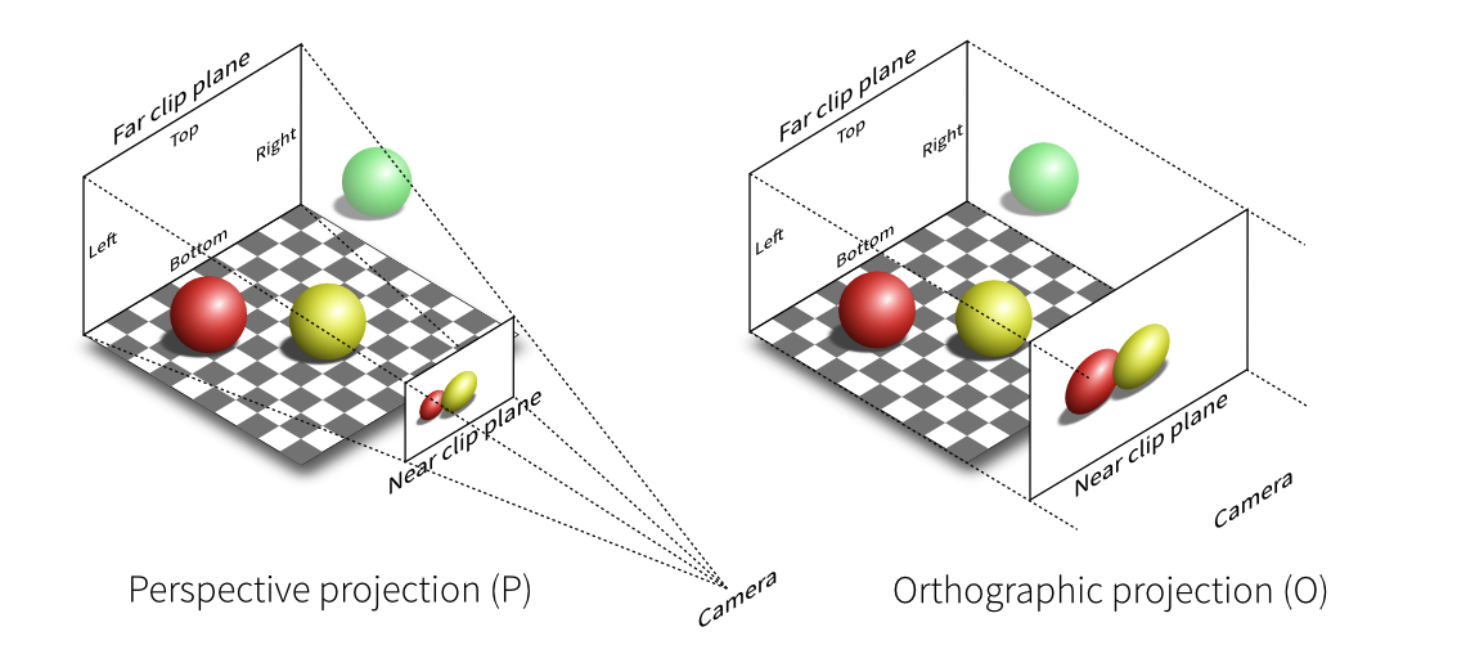
投影变换是将 “相机视角下的 3D 场景” 转换为 2D 图像的核心步骤,图形学中主要分为两类:正交投影(Orthographic Projection) 和透视投影(Perspective Projection),前者适用于工程绘图,后者更符合人眼视觉规律(近大远小)。
2.4.1 正交投影(Orthographic Projection)
正交投影的特点是 “所有投影光线平行”,物体的大小与距离无关,常用于建筑蓝图、CAD 设计等场景。
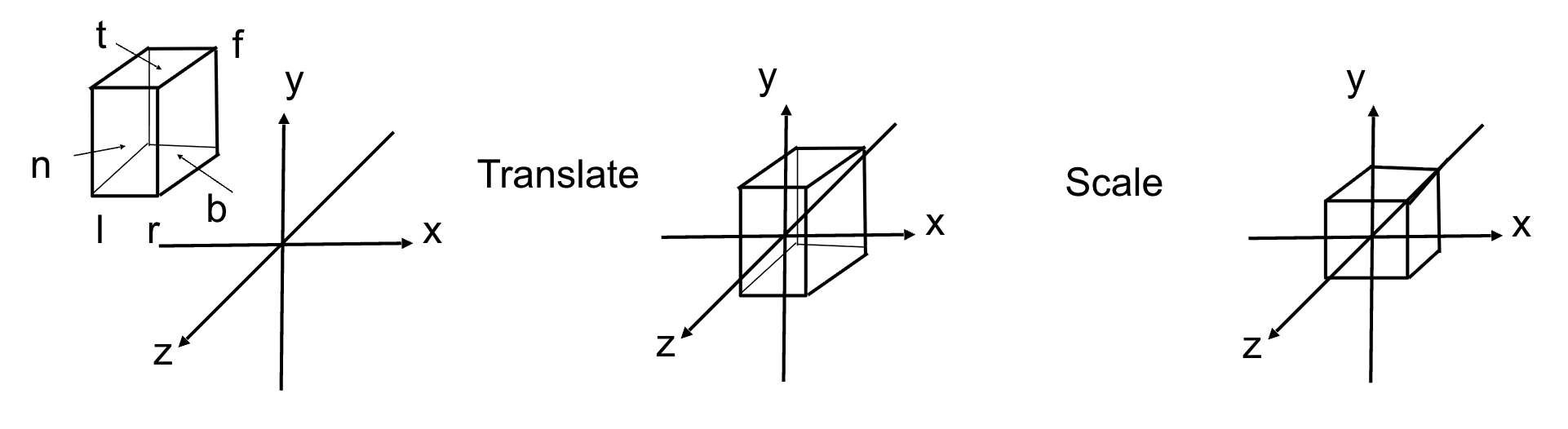
核心思想:将相机视角下的 3D 长方体区域(称为 “视景体”,定义为 [l,r]×[b,t]×[f,n][l, r] \times [b, t] \times [f, n][l,r]×[b,t]×[f,n])映射到 “标准立方体” [−1,1]3[-1, 1]^3[−1,1]3,步骤分为 “平移” 和 “缩放”:
- 视景体参数定义:l/rl/rl/r:x 轴方向的左 / 右边界;b/tb/tb/t:y 轴方向的下 / 上边界;f/nf/nf/n:z 轴方向的远 / 近平面(注意:由于相机看向 - Z 轴,近平面 n 的 z 坐标大于远平面 f,即 n > f );
- 变换目标:将长方体的中心移到原点,再缩放使各边长度为 2(适配标准立方体)。
正交投影矩阵 MorthoM_{ortho}Mortho:正交投影矩阵是 “平移矩阵” 与 “缩放矩阵” 的乘积(先平移后缩放):Mortho=Mscale⋅MtranslateM_{ortho} = M_{scale} \cdot M_{translate}Mortho=Mscale⋅Mtranslate。其中:
- 平移矩阵 MtranslateM_{translate}Mtranslate:将视景体中心移到原点,抵消各轴的偏移:Mtranslate=[100−l+r2010−b+t2001−n+f20001]M_{translate} = \begin{bmatrix} 1 & 0 & 0 & -\frac{l + r}{2} \\ 0 & 1 & 0 & -\frac{b + t}{2} \\ 0 & 0 & 1 & -\frac{n + f}{2} \\ 0 & 0 & 0 & 1 \end{bmatrix}Mtranslate=100001000010−2l+r−2b+t−2n+f1
- 缩放矩阵 MscaleM_{scale}Mscale:将视景体各边缩放到长度为 2(x 轴缩放因子 2r−l\frac{2}{r - l}r−l2,y 轴 2t−b\frac{2}{t - b}t−b2 ,z 轴 2n−f\frac{2}{n - f}n−f2 ):Mscale=[2r−l00002t−b00002n−f00001]M_{scale} = \begin{bmatrix} \frac{2}{r - l} & 0 & 0 & 0 \\ 0 & \frac{2}{t - b} & 0 & 0 \\ 0 & 0 & \frac{2}{n - f} & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix}Mscale=r−l20000t−b20000n−f200001
关键注意点:正交投影无 “近大远小” 效果,因此不适合模拟人眼或相机的真实视觉;z 轴的缩放因子使用 n−fn - fn−f(而非 f−nf - nf−n),是因为 n>fn > fn>f,确保缩放后 z 坐标范围从 [f, n] 变为 [-1, 1]。
2.4.2 透视投影(Perspective Projection)
透视投影是图形学中最常用的投影方式,符合人眼和相机的成像规律 —— 物体距离越远,在图像上的尺寸越小,平行直线会汇聚到消失点。
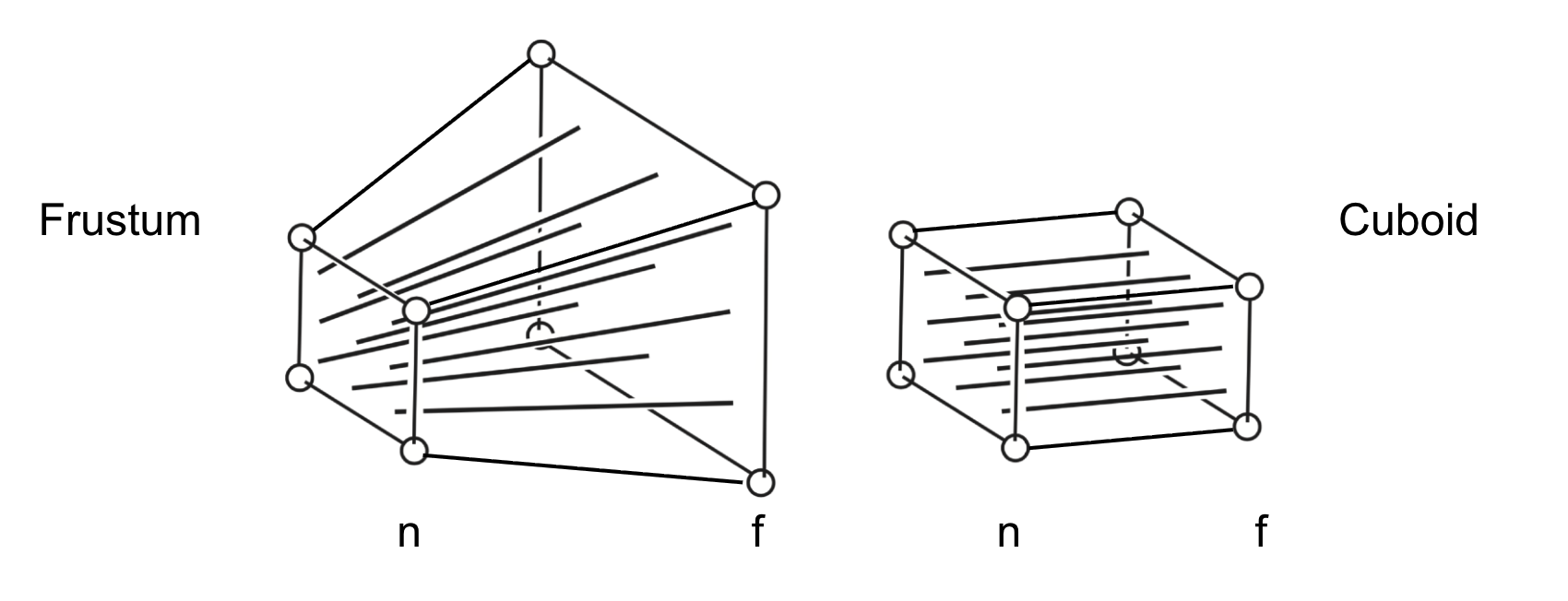
核心思想:两步实现透视投影的视景体是 “金字塔台”(称为 “视锥体”,近平面小、远平面大),无法直接用正交投影处理,因此分为两步:
- 第一步:挤压视锥体为长方体(Mpersp→orthoM_{persp \to ortho}Mpersp→ortho):将视锥体沿 z 轴方向挤压,使近平面不变、远平面与长方体对齐;
- 第二步:执行正交投影(MorthoM_{ortho}Mortho):用已有的正交投影矩阵处理挤压后的长方体;最终透视投影矩阵:Mpersp=Mortho⋅Mpersp→orthoM_{persp} = M_{ortho} \cdot M_{persp \to ortho}Mpersp=Mortho⋅Mpersp→ortho。
第一步推导:挤压矩阵 Mpersp→orthoM_{persp \to ortho}Mpersp→ortho 挤压的核心依据是 “相似三角形”,需先找到挤压后点的坐标关系,再构造齐次矩阵。
① 相似三角形推导 x/y 坐标关系
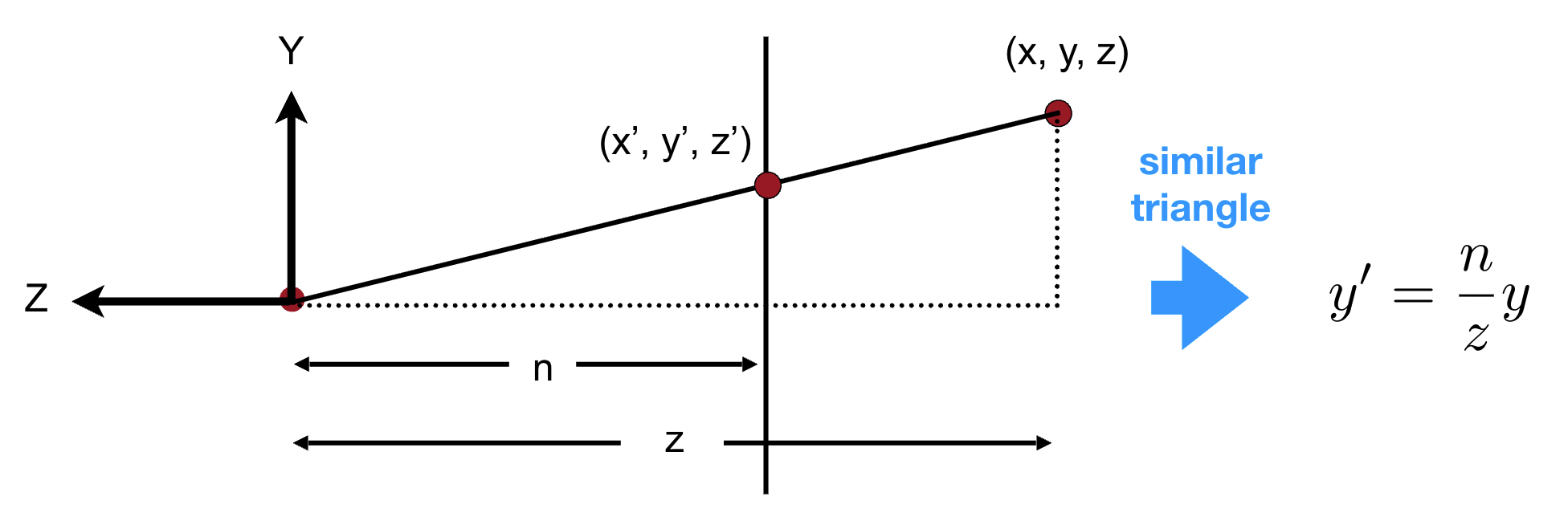
- 设视锥体内任意点 P = (x, y, z, 1),近平面 z 坐标为n,远平面为f。根据相似三角形(从相机原点到近平面的投影),挤压后点 P’ 的 x/y 坐标为:x′=nz⋅x,y′=nz⋅yx' = \frac{n}{z} \cdot x, \quad y' = \frac{n}{z} \cdot yx′=zn⋅x,y′=zn⋅y
- 逻辑:近平面上的点( z = n )挤压后 x/y 不变(x’ = x ),远平面上的点(z = f )挤压后 x/y 缩小为 nf⋅x\frac{n}{f} \cdot xfn⋅x,符合 “近大远小”。
② 用齐次坐标表示挤压
- 由于 x’/y’ 包含 1z\frac{1}{z}z1(非线性项),需用齐次坐标将其转化为线性变换:将点 P = (x, y, z, 1) 的齐次坐标缩放 z 倍,得到 (n x, n y, ?, z) (其中 “?” 表示 z’ 的未知项),对应的挤压矩阵初步形式为:Mpersp→ortho=[n0000n00??AB0010]M_{persp \to ortho} = \begin{bmatrix} n & 0 & 0 & 0 \\ 0 & n & 0 & 0 \\ ? & ? & A & B \\ 0 & 0 & 1 & 0 \end{bmatrix}Mpersp→ortho=n0?00n?000A100B0。
- 关键:齐次坐标的 “缩放不变性”—— (x,y,z,w)(x, y, z, w)(x,y,z,w) 与 (kx,ky,kz,kw)(k x, k y, k z, k w)(kx,ky,kz,kw) 表示同一个 3D 点,因此缩放 z 倍后仍表示原有点。
③ 求解 z’ 的系数 A 和 B
- 挤压矩阵的第三行负责计算 z’,需利用 “近平面和远平面上的点挤压后 z 坐标不变” 这两个约束:
- 约束 1:近平面上的点(z = n)挤压后 z’ = n 取近平面上任意点 (0, 0, n, 1),代入挤压矩阵得:[00AB]⋅[00n1]=An+B=n2\begin{bmatrix} 0 & 0 & A & B \end{bmatrix} \cdot \begin{bmatrix} 0 \\ 0 \\ n \\ 1 \end{bmatrix} = A n + B = n^2[00AB]⋅00n1=An+B=n2。
- 约束 2:远平面上的点(z = f)挤压后 z’ = f 取远平面上任意点 (0, 0, f, 1),代入挤压矩阵得:[00AB]⋅[00f1]=Af+B=f2\begin{bmatrix} 0 & 0 & A & B \end{bmatrix} \cdot \begin{bmatrix} 0 \\ 0 \\ f \\ 1 \end{bmatrix} = A f + B = f^2[00AB]⋅00f1=Af+B=f2。
- 解方程组:联立两个约束,解得 A=n+f,B=−nfA = n + f,B = -n fA=n+f,B=−nf。
④ 最终挤压矩阵
- Mpersp→ortho=[n0000n0000n+f−nf0010]M_{persp \to ortho} = \begin{bmatrix} n & 0 & 0 & 0 \\ 0 & n & 0 & 0 \\ 0 & 0 & n + f & -n f \\ 0 & 0 & 1 & 0 \end{bmatrix}Mpersp→ortho=n0000n0000n+f100−nf0
第二步:执行正交投影
- 将挤压后的长方体(视景体变为 [l,r]×[b,t]×[f,n][l, r] \times [b, t] \times [f, n][l,r]×[b,t]×[f,n])代入正交投影矩阵 MorthoM_{ortho}Mortho,最终得到透视投影矩阵:Mpersp=Mortho⋅Mpersp→orthoM_{persp} = M_{ortho} \cdot M_{persp \to ortho}Mpersp=Mortho⋅Mpersp→ortho。
三、疑难点整理总结
待补充。
写在最后
💗 感谢各位 📖 读者的支持,如果觉得文章对你有用,请 ♥️ 点赞 🌟 收藏,笔者将不胜感激 🌹~