【深度学习】深度学习核心:优化与正则化超详细笔记
深度学习核心:优化与正则化超详细笔记(附图解)
本笔记基于南方科技大学张建国教授的《Deep Learning (CS324)》课程第五讲内容,该课程主要参考Ian Goodfellow等人的《Deep Learning Book》第7、8章。本文旨在为初学者提供一份关于深度学习优化与正则化的全面、易懂的学习指南。
前言:为什么优化与正则化如此重要?
想象一下,训练一个深度学习模型就像是在一个巨大、黑暗且地形复杂的山谷里寻找最低点(即损失函数的最小值)。
- 优化 就像是你的 寻路策略。你是选择一步看一步(随机梯度下降),还是先观察整个山谷的地形再行动(批量梯度下降)?你是直来直去,还是借助惯性(动量)更快地滑行?
- 正则化 则像是给你的 寻路装备增加约束。为了防止你只在训练走过的小路上表现优异(过拟合),你需要一些方法让自己变得更“皮实”,能适应各种未知的路况(泛化能力)。
掌握好这两者,是训练出高性能深度学习模型的关键。
一、梯度下降的三兄弟:批量、随机与小批量
梯度下降是优化算法的基石,但它并非只有一种形式。根据每次更新参数时使用的数据量不同,可以分为三种主要类型。
1.1 批量梯度下降(Batch Gradient Descent)
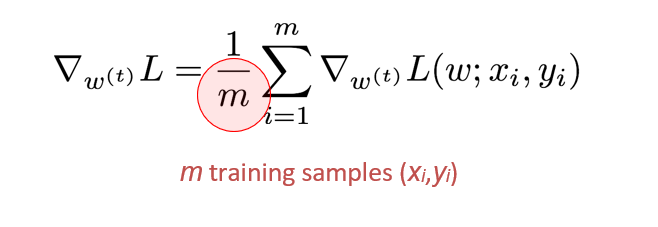
核心思想:每次更新参数时,都使用整个训练集来计算损失和梯度。
计算过程:
- 将所有
m个训练样本(x_i, y_i)输入网络。 - 计算所有样本的平均损失
J(θ)。 - 计算这个总损失关于模型参数
θ的梯度∇J(θ)。 - 用这个梯度更新所有参数:
θ = θ - η * ∇J(θ)。
优点:
- 收敛路径稳定:由于每次都考虑了所有数据,梯度方向准确,下降路径平稳,不会剧烈震荡。
- 理论保证:对于凸函数,保证能找到全局最优解。
缺点: - 计算成本极高:当数据集非常大时(百万、千万级别),计算一次完整梯度需要耗费大量时间和内存,可能不切实际。
- 容易陷入局部最优:在非凸的深度学习损失面上,稳定的梯度可能会使其陷入某个局部最小值或鞍点,难以跳出。
生活比喻:好比你要决定整个城市最受欢迎的餐厅。你调查了城市里每一个人的意见,然后才做出决定。这个决定非常准确,但耗时耗力。
1.2 随机梯度下降
核心思想:每次更新参数时,只随机选择一个训练样本来计算损失和梯度。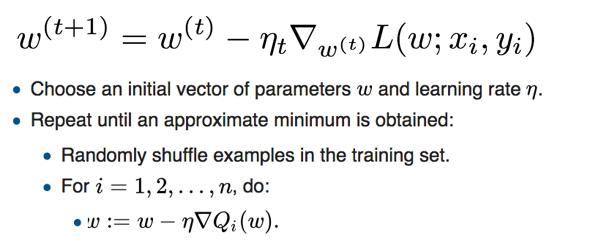
计算过程:
- 从训练集中随机抽取一个样本
(x_i, y_i)。 - 计算这个样本的损失
J(θ; x_i, y_i)。 - 计算该样本的梯度
∇J(θ; x_i, y_i)。 - 立即更新参数:
θ = θ - η * ∇J(θ; x_i, y_i)。 - 重复以上步骤,直到遍历完所有样本(完成一个epoch)。
优点:
- 更新速度快:每一步计算量极小,能快速开始学习。
- 有助于跳出局部最优:单样本的梯度带有很大的随机性(噪声),这种噪声虽然让下降路径看起来“醉汉走路”,但却能帮助模型“冲”出局部最小值和鞍点。
- 适合在线学习:对于数据流式到来的场景(如实时推荐),SGD可以即时更新模型。
缺点: - 收敛不稳定:高方差导致更新过程震荡剧烈,损失函数下降曲线毛刺很多。
- 无法充分利用并行计算:一次只处理一个样本,无法发挥GPU等硬件的并行计算优势。
生活比喻:还是决定餐厅,你这次只问了街边随机遇到的一个人的意见,然后就立刻更新你的“最佳餐厅”排名。你的排名变化很快,但可能很不稳定,容易受极端个例影响。
1.3 小批量梯度下降
核心思想:这是BGD和SGD的折中方案,也是目前深度学习领域的标准做法。每次更新参数时,使用一小批(mini-batch)数据。
计算过程:
- 从训练集中随机抽取一小批
B个样本(B通常是32, 64, 128…)。 - 计算这批样本的平均损失
J(θ; x_(i:i+B), y_(i:i+B))。 - 计算该批次的梯度
∇J(θ; x_(i:i+B), y_(i:i+B))。 - 更新参数:
θ = θ - η * ∇J(θ; x_(i:i+B), y_(i:i+B))。
优点:
- 兼顾了效率和稳定性:相比BGD,计算量大幅下降;相比SGD,每次更新都参考了多个样本,梯度方向更稳定,降低了方差。
- 充分利用硬件并行性:批量大小
B可以很好地适配GPU内存,实现高效并行计算。
缺点: - 引入了一个新的超参数:批量大小
B的选择需要经验。太小则不稳定,太大则接近BGD且消耗内存。通常的选择是“尽可能大,只要GPU内存放得下”。
生活比喻:你这次决定问**一小群人(比如一个办公室的同事)**的意见。这个决定比问一个人要稳定,比问全城人要高效,是现实中最好的策略。
二、优化路上的“拦路虎”:挑战与对策
即使有了梯度下降,训练过程也并非一帆风顺。我们会遇到各种棘手的“地形”。
2.1 病态条件
问题描述:损失函数在某些方向上非常陡峭,而在另一些方向上非常平缓,形成一个狭长的山谷。
影响:梯度下降会在陡峭的墙壁之间来回震荡,进展缓慢,难以沿着平缓的方向直达谷底。
对策:后面会讲到的动量法和自适应学习率方法能有效缓解这个问题。
2.2 局部最小值、鞍点与平台区
- 局部最小值:一个“小坑”,不是全局最低点。
- 鞍点:一个“马鞍”形状,在某些方向是最小值,在另一些方向是最大值。在高维空间中,鞍点比局部最小值更常见。
- 平台区:梯度接近于零的平坦区域,模型学习停滞。
影响:标准梯度下降可能会在这些区域“卡住”,因为梯度太小或为零,无法继续前进。
对策:SGD的随机性本身就是一种对策,噪声可以帮助模型“跳”出这些区域。此外,动量法也能凭借惯性冲过平缓区域。
2.3 悬崖与梯度爆炸
问题描述:参数空间中某些区域,损失函数会发生突变,形成一个“悬崖”。
影响:当梯度计算点靠近悬崖时,梯度值会变得异常巨大,导致参数更新步长过大,可能直接“飞”到参数空间的一个糟糕位置,甚至导致数值溢出(NaN)。
对策:梯度裁剪是一种常用技术,即设定一个梯度的阈值,当梯度的范数超过这个阈值时,就将其缩放到阈值大小。
三、给优化器装上“加速器”:动量法
为了克服上述挑战,特别是震荡和平台区问题,我们引入了动量法。
3.1 标准动量
核心思想:借鉴物理学中的动量概念。在更新参数时,不仅考虑当前梯度,还要保留一部分历史更新方向。
类比:想象一个球从山上滚下。如果它只受当前坡度(梯度)的影响,可能会在狭窄的山谷里来回震荡。但如果它有惯性(动量),它会积累之前的速度,更容易冲过震荡区域,更快地滚向谷底。
公式:
v_t = γ * v_{t-1} + η * ∇J(θ)(更新速度)θ = θ - v_t(用速度更新位置)
v_t是当前时刻的“速度”向量。v_{t-1}是上一时刻的速度。γ是动量系数(通常取0.5, 0.9, 0.99),控制历史动量的保留程度。γ越大,惯性越强。η是学习率。
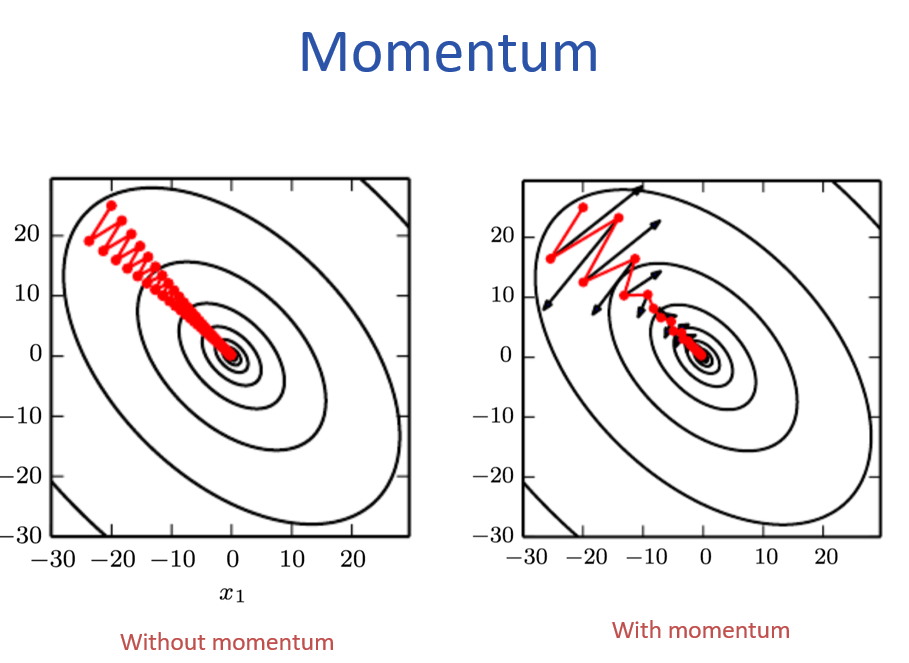
效果:- 加速收敛:在梯度方向一致的方向上,动量会累积,加速前进。
- 抑制震荡:在梯度方向反复变化的方向上,动量会相互抵消,减小震荡。
图:无动量(左)震荡剧烈,有动量(右)能有效抑制震荡并加速 [图源:PPT]
3.2 Nesterov 加速梯度
核心思想:标准动量的一个“ lookahead”改进版本。它在计算当前梯度之前,先根据历史动量“试探性地”向前走一步,然后在那个“未来位置”计算梯度并修正。
公式:
v_t = γ * v_{t-1} + η * ∇J(θ - γ * v_{t-1})(在“未来位置”计算梯度)θ = θ - v_t
优势:Nesterov动量对未来的梯度有了一定的预判,使得更新方向更准确,收敛通常比标准动量更快、更稳定。
四、自适应学习率:每个参数都有自己的“学习节奏”
全局学习率 η 对所有参数一视同仁,但这往往不是最优的。有些参数需要大步快跑,有些则需要小步慢走。自适应学习率方法应运而生。
4.1 AdaGrad (Adaptive Gradient)
核心思想:为每个参数维护一个累积的历史梯度平方和。梯度越大的参数,其学习率会自动变得越小;反之亦然。
公式:
G_t = G_{t-1} + (∇J(θ))^2(累积梯度平方)θ = θ - η / (√G_t + ε) * ∇J(θ)(用累积梯度缩放学习率)
G_t是一个对角矩阵,存储了每个参数到当前时刻为止的梯度平方和。ε是一个很小的数(如1e-8),为了防止除以零。
优点:无需手动调学习率,能自动适应不同参数。
缺点:G_t是单调递增的,导致学习率会不断衰减,最终可能变得非常小,导致模型提前停止学习。
4.2 RMSprop (Root Mean Square Propagation)
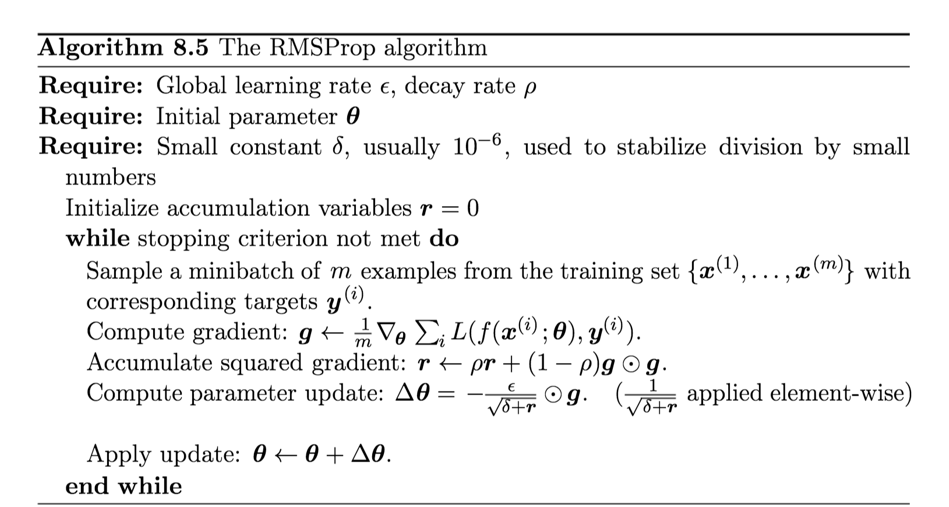
核心思想:这是对AdaGrad的改进。它不再累积所有历史梯度,而是使用一个指数移动平均来计算梯度的平方均值。这使得算法只关注最近一段时间的梯度情况。
公式:
E[g^2]_t = β * E[g^2]_{t-1} + (1-β) * (∇J(θ))^2(计算梯度平方的指数移动平均)θ = θ - η / (√E[g^2]_t + ε) * ∇J(θ)
β是衰减率(通常取0.9),控制历史信息的保留程度。
优点:解决了AdaGrad学习率单调递减的问题,非常适合非凸优化,是深度学习中非常流行的算法。
4.3 Adam (Adaptive Moment Estimation)
核心思想:集大成者,可以看作是 RMSprop + Momentum 的结合体。它同时为每个参数维护了梯度的一阶矩(均值,类似动量)和二阶矩(方差,类似RMSprop)。
公式:
m_t = β1 * m_{t-1} + (1-β1) * ∇J(θ)(一阶矩估计,即动量)v_t = β2 * v_{t-1} + (1-β2) * (∇J(θ))^2(二阶矩估计,即RMSprop)m̂_t = m_t / (1 - β1^t)(修正一阶矩的偏差)v̂_t = v_t / (1 - β2^t)(修正二阶矩的偏差)θ = θ - η / (√v̂_t + ε) * m̂_t(更新参数)
β1通常取0.9,β2通常取0.999。- 步骤3和4是为了在训练初期修正偏差,因为
m_t和v_t初始化为0。
优点: - 结合了动量和RMSprop的优点:既有惯性加速,又有自适应学习率。
- 鲁棒性强:对超参数的选择不那么敏感,通常使用默认值就能取得不错的效果。
- 收敛速度快:在大多数情况下是首选的优化算法。
总结与选择:
- 初学者/快速原型:直接用 Adam,简单有效。
- 追求最佳性能:可以尝试 SGD + Momentum,并配合精良的学习率衰减策略,有时能获得比Adam更好的最终结果。
- RMSprop 也是一个非常可靠的选择,特别是在某些RNN任务中。
五、防止模型“死记硬背”:正则化技术
当模型过于复杂时,它可能会“记住”训练数据的所有细节和噪声,而不是学习其内在规律,这就是过拟合。正则化技术通过限制模型的复杂度来防止过拟合。
5.1 L1 与 L2 正则化
核心思想:在损失函数后面加上一个惩罚项,惩罚模型中过大的权重。
L2 正则化(权重衰减, Weight Decay):
- 惩罚项:
λ * Σ w_i^2(λ是正则化强度) - 效果:让模型的权重尽可能小,但不会变为0。这会使模型更平滑,倾向于使用所有输入特征,但给不重要的特征较小的权重。
- 更新规则:
θ = θ - η * ∇J(θ) - η * λ * θ,可以看到,每次更新都会让权重θ乘以一个略小于1的因子(1 - η * λ),这就是“权重衰减”的由来。
L1 正则化: - 惩罚项:
λ * Σ |w_i| - 效果:倾向于让不重要的权重精确地变为0。这使得模型变得稀疏,相当于自动进行了特征选择,只保留了最重要的特征。
- 为什么能产生稀疏性?:L1惩罚项的导数是常数(
λ * sign(w)),无论权重多小,惩罚力度都一样,这会推动权重一直减小直到变成0。
| 特性 | L2 正则化 | L1 正则化 |
|—|—|—|
| 惩罚项 |λ * Σ w²|λ * Σ |w||
| 权重效果 | 权重趋近于0(但不为0) | 权重变为0(稀疏) |
| 适用场景 | 通用,防止过拟合 | 需要特征选择,希望模型稀疏 |
5.2 数据增强
核心思想:与其限制模型,不如给它“看”更多的数据。当训练数据有限时,我们可以通过对现有数据进行各种变换,创造出“新”的数据。
常见方法:
- 图像:随机裁剪、旋转、翻转、颜色抖动、添加噪声等。
- 文本:同义词替换、回译(翻译成另一种语言再翻译回来)等。
效果:模型能学习到数据的不变性(比如,猫不管正着放还是倒着放都是猫),从而大大提升泛化能力。
5.3 早停
核心思想:一个非常简单但极其有效的正则化方法。在训练过程中,同时监控模型在训练集和验证集上的性能。
实施步骤:
- 每个epoch结束后,计算验证集上的误差(或准确率)。
- 只要验证集误差持续下降,就继续训练。
- 当验证集误差连续多次不再下降,甚至开始上升时,就停止训练。
- 保存验证集性能最好的那个时刻的模型参数。
效果:在模型刚刚开始过拟合(即开始“死记硬背”训练数据)的时候及时刹车,防止其走得太远。
5.4 Dropout
核心思想:一种在训练期间“随机失活”神经元的正则化技术。
实施步骤:
- 在训练的每次迭代中,以概率
p随机地选择一部分神经元,将其输出暂时置为0。 - 前向传播和反向传播都只在剩下的神经元网络中进行。
- 在测试时,所有神经元都参与工作,但它们的输出需要乘以
p(或者说,在训练时将存活神经元的输出除以p),以补偿训练时被丢弃的神经元。
效果:
- 集成学习的近似:每次迭代都在训练一个不同的“子网络”,最终模型相当于大量子网络的集成,增强了鲁棒性。
- 强制神经元学习冗余表示:由于不知道哪个神经元会被丢弃,每个神经元都不能依赖于其他特定的神经元,必须学习到更有用的特征。
- 有效防止过拟合:是深度学习中最常用的正则化手段之一。
六、训练的“起手式”:参数初始化与数据预处理
好的开始是成功的一半。正确的参数初始化和数据预处理能让训练事半功倍。
6.1 权重初始化
为什么重要?:如果所有权重都初始化为同一个值(比如0),那么同一层的所有神经元在反向传播时会接收到完全相同的梯度,从而进行完全相同的更新。这会导致“对称性”问题,使得所有神经元学到的东西都一样,网络失去了学习能力。
原则:需要打破对称性,让权重具有随机性,同时要控制好权重的尺度。
常用方法:
- Xavier/Glorot 初始化:适用于
tanh和sigmoid激活函数。它根据输入和输出的神经元数量来初始化权重,旨在让各层输入和输出的方差保持稳定。- 权重从
[-√(6/(m+n)), √(6/(m+n))]的均匀分布中采样,其中m是输入单元数,n是输出单元数。
- 权重从
- He 初始化:适用于
ReLU及其变体。考虑到ReLU会使一半的神经元输出为0,He初始化的方差是Xavier的两倍。- 权重从均值为0,方差为
2/m的正态分布中采样。
- 权重从均值为0,方差为
6.2 数据预处理
目标:让输入数据更适合模型处理。
常用方法:
- 零中心化:对每个特征维度,减去其均值。使得数据以0为中心分布。
- 归一化:将数据缩放到相似的尺度。最常见的是将每个特征除以其标准差,使其变为标准正态分布(均值为0,方差为1)。
为什么重要?:如果不同特征的尺度差异巨大(比如一个特征是0-1,另一个是0-10000),那么梯度下降的路径会变得非常扭曲,收敛缓慢。归一化能让损失函数的等高线图更接近圆形,便于优化。
6.3 批量归一化
核心思想:这是一个革命性的技术,它将数据预处理的思想应用到了网络的每一层。
问题:在深度网络中,随着参数的更新,每一层输入的分布会不断发生变化,这被称为“内部协变量偏移”。这使得每一层都需要不断去适应新的输入分布,减慢了训练速度。
解决方法:在网络的每一层(通常是激活函数之前)都进行一次归一化。
操作步骤:
- 对于一个mini-batch的数据,计算其均值
μ_batch和方差σ²_batch。 - 对该批数据进行归一化:
x̂ = (x - μ_batch) / √(σ²_batch + ε)。 - 对归一化后的数据进行缩放和平移:
y = γ * x̂ + β。其中γ和β是可学习的参数,让网络可以恢复出原始数据分布(如果需要的话)。
惊人效果:
- 允许使用更大的学习率:加速训练。
- 减少对初始化的依赖:即使初始化不那么好,BN也能帮助稳定训练。
- 轻微的正则化效果:由于每个batch的均值和方差是由该batch数据计算得出的,引入了噪声,有类似Dropout的效果。
- 缓解梯度消失/爆炸问题。
七、总结
训练一个深度学习模型,就像是一门艺术与科学的结合。我们需要:
- 选择一个合适的优化器:从 Adam 开始,它是稳健的基线;若追求极致性能,可尝试 SGD with Momentum 配合学习率调度。
- 应用正则化:Dropout 和 L2 正则化 是标配;数据增强 是提升性能的免费午餐;早停 是防止过拟合的保险。
- 做好准备工作:使用 Xavier 或 He 初始化;对输入数据进行零中心化和归一化;在模型中加入 批量归一化 层,几乎总能带来提升。
这些技术不是孤立的,而是相辅相成的。理解它们的原理,并在实践中不断尝试和组合,是通往深度学习高手的必经之路。希望这份详细的笔记能为你打下坚实的基础!