stm32 can错误中断不处理
项目场景:
xx
问题描述
设备上电后,第一次能进入can错误中断处理函数,之后就进不了了。
原因分析:
通过debug发现第二次的时候ERRI这个没有位没有被置1。
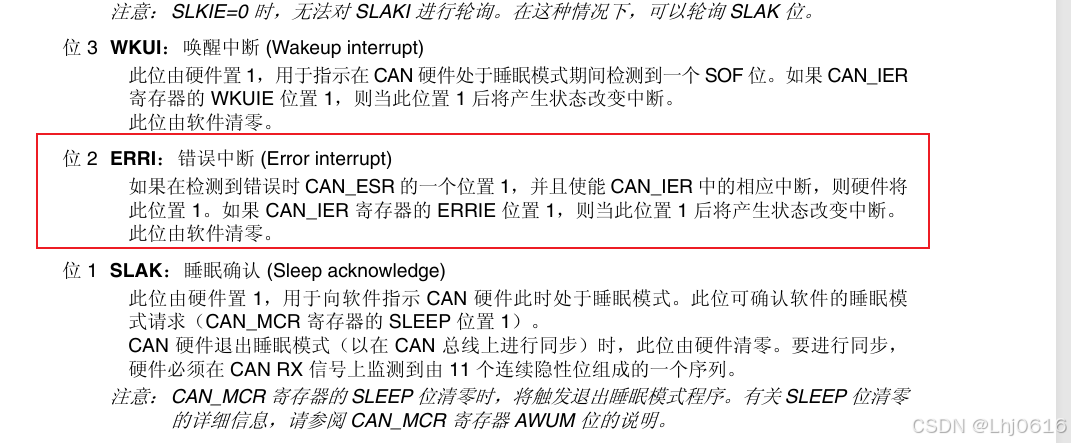
为什么没有被置1呢?
因为我的错误处理(先进入再退出初始化模式)这一操作不是在中断错误处理函数中操作的,是首先在中断错误处理函数中关闭can bus_off错误使能,然后在另一个定时器中断处理函数中操作的(can 快慢恢复的设计),问题就出在这里。在这个定时器中断处理函数中,我恢复完相应的can后,没有打开can bus_off错误使能,想着2s之后打开,但是由于2s内我发送了多包can数据,导致can TEC又到0xF8了。然后这个时候我打开can bus_off错误使能,硬件也不能置位ERRI了。如果TEC没有到0xF8之前给can bus_off错误使能打开,就可以了
解决方案:
总体的解决思路就是:在TEC没有到0xF8之前给can bus_off错误使能打开