《基于分布式多模态传感模块的全身尺度机器人皮肤:设计、评估与应用》TR-O 2025论文解析
目录
一、引言:为什么需要 “机器人皮肤”?
二、方法论:机器人皮肤 “长什么样”?怎么工作?
1. 两大传感算法:分工合作感知不同触摸
2. 制作流程:怎么做出这块皮肤?
3. 计算系统:怎么让皮肤 “实时思考”?
三、性能测试:皮肤 “灵不灵”?
1. 互补性测试:两种算法有没有 “盲区”?
2. 麦克风的 “听力范围”:能传多远?
3. 电极的 “触感灵敏度”:能测多轻的力?
四、装到机器人上:怎么适配真实机械臂?
1. 适配机械臂形状:3D 打印 “过渡底座”
2. 排除电机噪音:加 “参考麦克风”
五、触觉通信:机器人能 “懂” 触摸吗?
1. 编码:把触摸变成 “机器能读的图”
2. 解码:用简单 CNN 识别触摸
3. 演示:不同触摸对应不同反应
六、核心创新点:这篇文章到底厉害在哪?
这篇文章核心是开发了一种全身尺度的机器人皮肤,解决了现有机器人触觉传感器 “要么元件多、成本高,要么感知范围窄” 的问题,通过两种互补的感知机制和一体化硬件设计,让机器人能像人一样通过触觉与人类互动,还在商用机械臂上成功演示了触觉通信。下面按文章顺序,结合所有图片通俗讲解,最后重点说创新点并附思维导图。
一、引言:为什么需要 “机器人皮肤”?
人类靠皮肤的机械感受器互动 —— 比如手能精细抓握(高灵敏度),胳膊能感知别人的轻拍(被动触摸),这些触摸能传递情绪(比如拍肩鼓励)。但现在的机器人大多只靠视觉,没有全身触觉,只能避免和人碰,没法自然互动。
现有机器人皮肤方案有短板:
- 阵列式:像网格一样铺电极,一个电极坏了一片就失灵;
- 模块化:多个传感器连起来,耐用但费电、计算量大;
- 就算能覆盖大面积,大多只能感知一种触摸(比如只能测压力,测不了轻挠)。
文章的目标就是做一种 “能贴满机器人全身、能感知多种触摸、还不费资源” 的皮肤,核心思路是用超分辨率 + 断层扫描两种 “少元件也能广感知” 的机制,再结合多模态硬件。
这里先看最直观的应用场景(图 1):
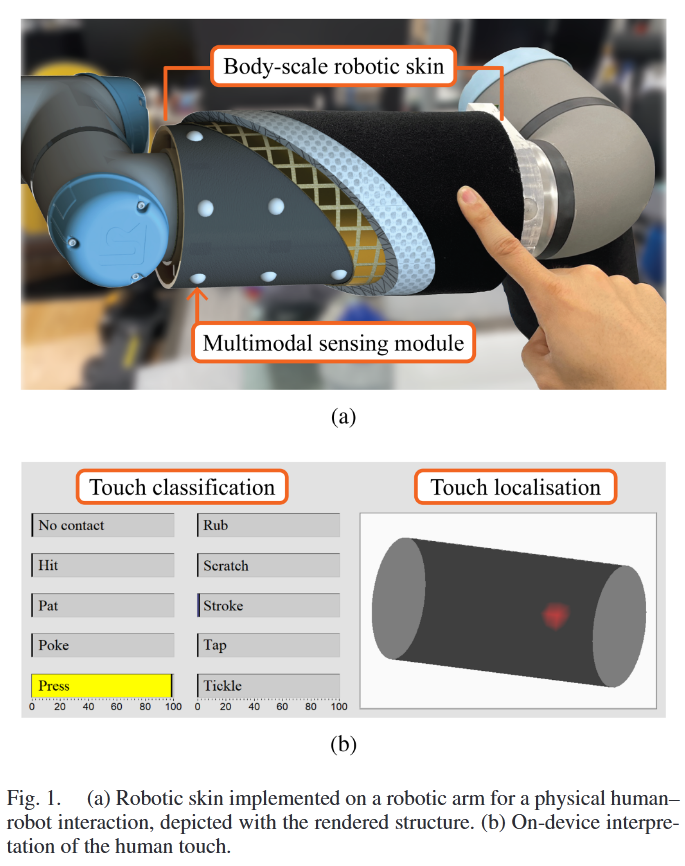
- 图 1 (a):把这种皮肤贴在商用机械臂上,能覆盖机械臂的圆柱表面;
- 图 1 (b):皮肤能识别 9 种触摸(比如打一下、拍一下、按一下),还能定位触摸位置,机器人根据触摸 “听话”。
二、方法论:机器人皮肤 “长什么样”?怎么工作?
这部分是核心,讲皮肤的 “设计 + 算法 + 制作 + 计算”,所有硬件和软件都是为了同时实现 “大面积覆盖” 和 “多触摸感知”。
1. 两大传感算法:分工合作感知不同触摸
机器人皮肤要应对两种触摸:
- 动态触摸(比如轻挠、抚摸):高频振动,用「声学超分辨率(ASR)」;
- 静态触摸(比如按压、攥握):低频持续压力,用「电阻断层扫描(ERT)」。
配合这两种算法,皮肤分两大硬件:多层织物(接收触摸)和多模态传感模块(MSM)(收集信号),看细节(图 2):
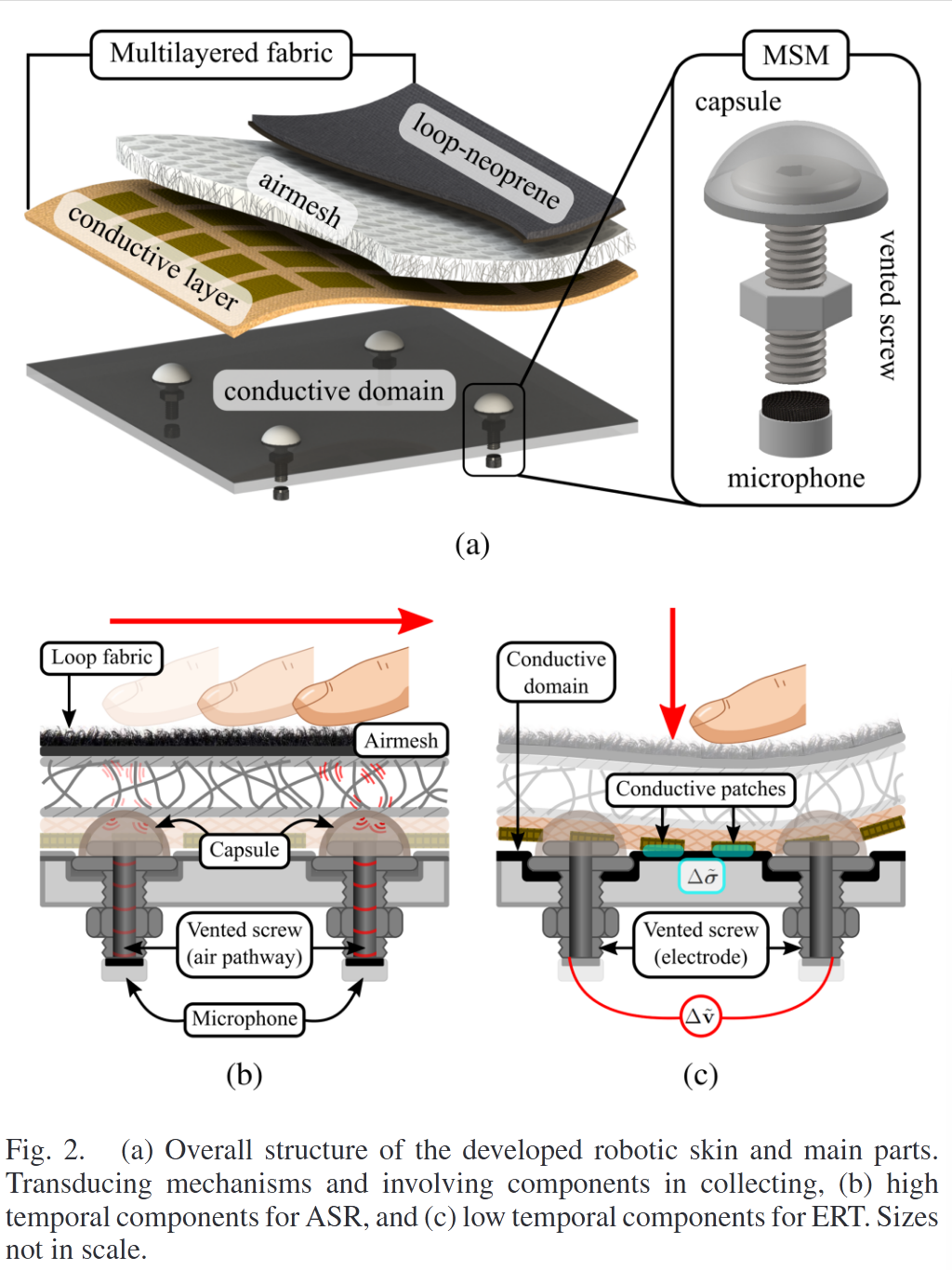
- 图 2 (a):整体结构 —— 多层织物在外面 “接活”,MSM 在下面 “收信号”,贴在机器人表面;
- 图 2 (b):ASR 的高频感知组件:多层织物的上层是「loop-neoprene」(尼龙圈 + 氯丁橡胶),表面有纹理,被摸时会产生微小振动;中间是「airmesh」(类似海绵的聚酯纤维),能把振动传到远处的 MSM;MSM 里的「封装麦克风」:用硅胶胶囊包着,像人耳鼓膜一样,只听织物传来的振动,不听环境噪音;
- 图 2 (c):ERT 的低频感知组件:多层织物的下层是「导电层」(不导电布上贴导电补丁);按压时,导电补丁会贴紧下面的「导电域」(比如喷了石墨的底座),改变局部导电性;MSM 里的「通风螺丝电极」:螺丝是导电的,既固定麦克风,又能测导电域的电阻变化,通风孔还能让振动传到麦克风。
2. 制作流程:怎么做出这块皮肤?
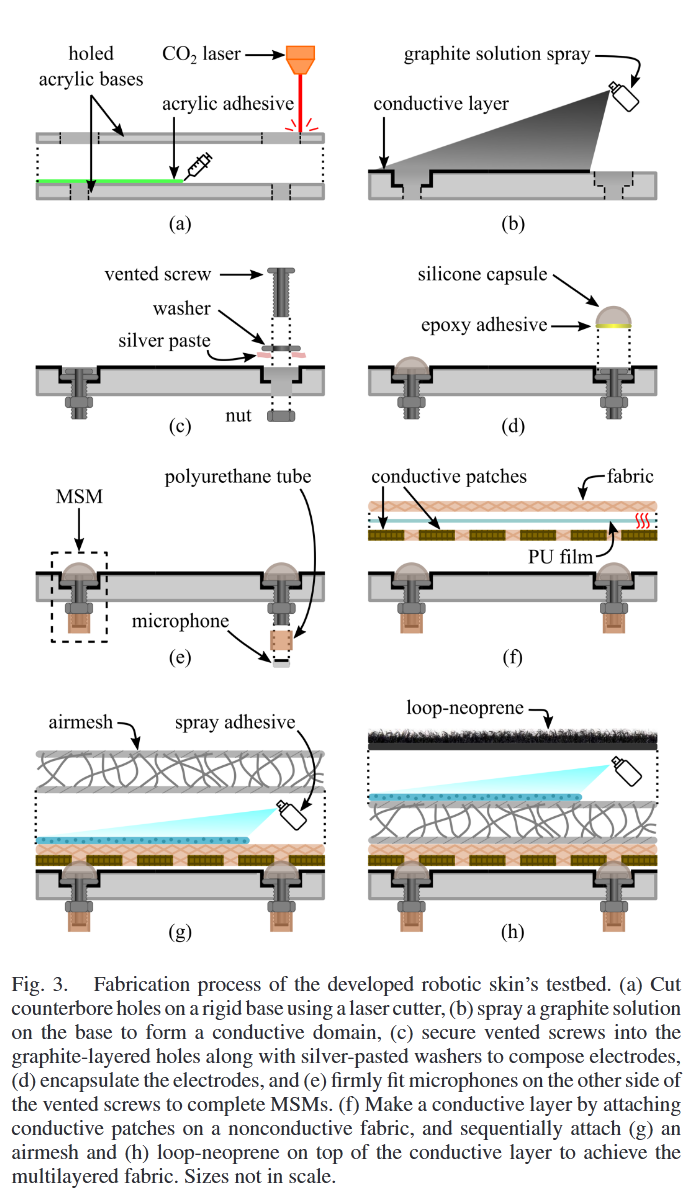
用亚克力板当 “模拟机器人表面”,一步步做测试样品(图 3),流程很像 “贴手机膜 + 装零件”:
- 切底座:用 CO₂激光在两块亚克力板上切孔,粘成带 “沉头孔” 的底座(图 3a),孔间距 75mm,共 16 个(4×4 阵列);
- 做导电层:往底座喷石墨溶液,形成导电域(电阻几十千欧,图 3b),相当于皮肤的 “神经通路”;
- 装 MSM:把通风螺丝拧进孔,螺丝下涂银胶保证导电,再把硅胶胶囊粘在螺丝上,胶囊里塞麦克风(图 3c-d);
- 叠多层织物:先贴导电层(导电补丁朝石墨面),再粘 airmesh,最后贴 loop-neoprene,用喷雾胶固定(图 3f-h)。
3. 计算系统:怎么让皮肤 “实时思考”?
用「myRIO-1900」嵌入式系统(带 FPGA 和处理器),解决 “多传感器同时处理” 的问题:
- FPGA:像 “快递分拣员”,用多路转换器(multiplexer)快速切换麦克风和电极,并行采样(麦克风 2kHz,电极 40Hz),还能过滤噪音(比如给电极信号加 200Hz 低通滤波);
- 处理器:算 ASR 和 ERT 的算法,比如 ERT 只测 “8 个方向相邻的电极对”(避免电极对太多拖慢速度),ASR 只在 3 个以上 MSM 超过阈值时计算(减少无效运算)。
三、性能测试:皮肤 “灵不灵”?
做了三个实验,验证皮肤的感知能力,核心是 “两种算法互补,覆盖更多触摸场景”。
1. 互补性测试:两种算法有没有 “盲区”?
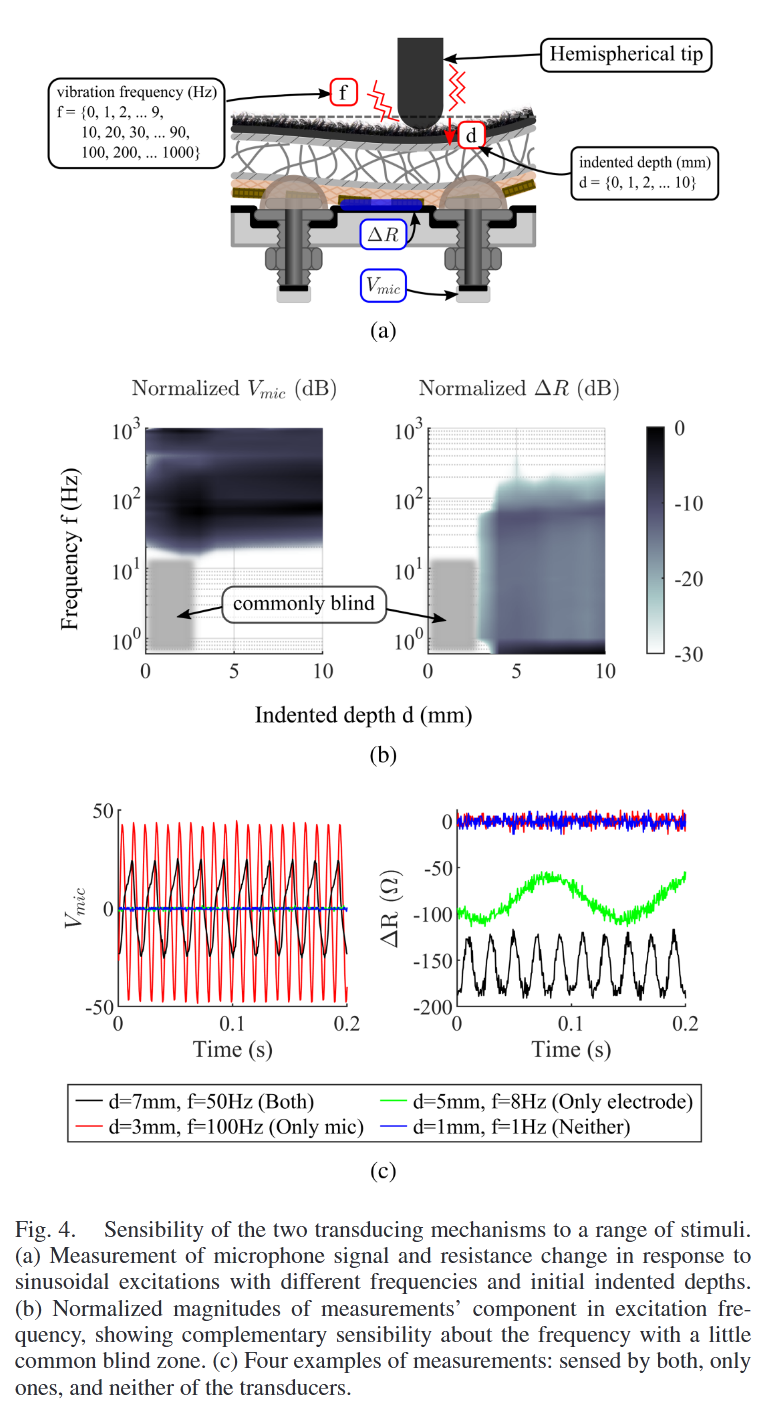
用振动器(带半球形头)往皮肤上按不同深度(0-10mm)、加不同频率(0-1000Hz)的振动(图 4a),看麦克风和电极的反应:
- 图 4 (b):麦克风对 20Hz 以上的振动敏感(不管按多深),电极对 0-200Hz 的振动敏感,但要按够 3mm 以上才反应(压力不够导电层贴不紧);
- 图 4 (c):举四个例子 —— 轻挠(50Hz,7mm 深)两种都能测;快拍(100Hz,3mm 深)只有麦克风测得到;重按(8Hz,5mm 深)只有电极测得到;极轻碰(1Hz,1mm 深)都测不到(但这种触摸很少见,不算大问题)。
结论:两者互补,几乎覆盖了人类互动中常见的触摸(0-1000Hz,0.3-10N)。
2. 麦克风的 “听力范围”:能传多远?
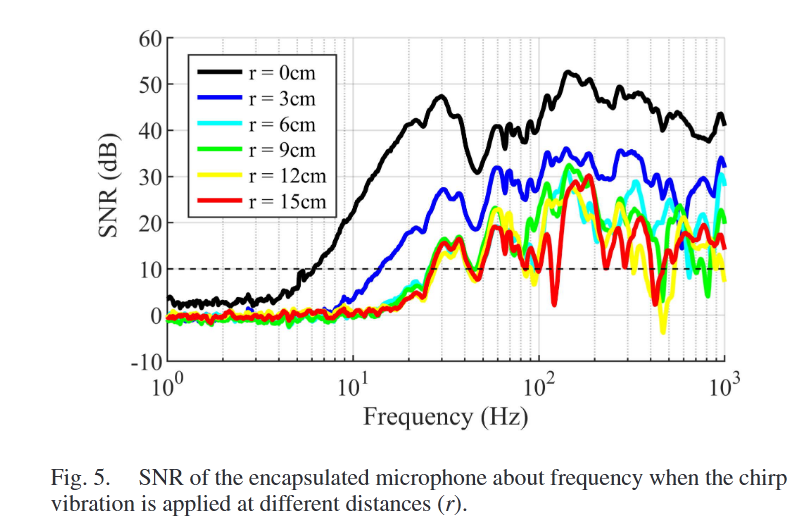
用 “扫频振动”(1-1000Hz 慢慢变),在离麦克风 0-15cm 的位置测试,算信号噪音比(SNR)(图 5):
- 3cm 内:麦克风对 6Hz 以上的振动都敏感(比如手指轻划的声音);
- 6cm 外:要 27Hz 以上的振动才反应(比如拍一下的声音);
- 15cm(两倍麦克风间距):还能测到强一点的振动,说明麦克风的 “听力范围” 够大,能实现超分辨率(用几个麦克风的信号算触摸点)。
3. 电极的 “触感灵敏度”:能测多轻的力?
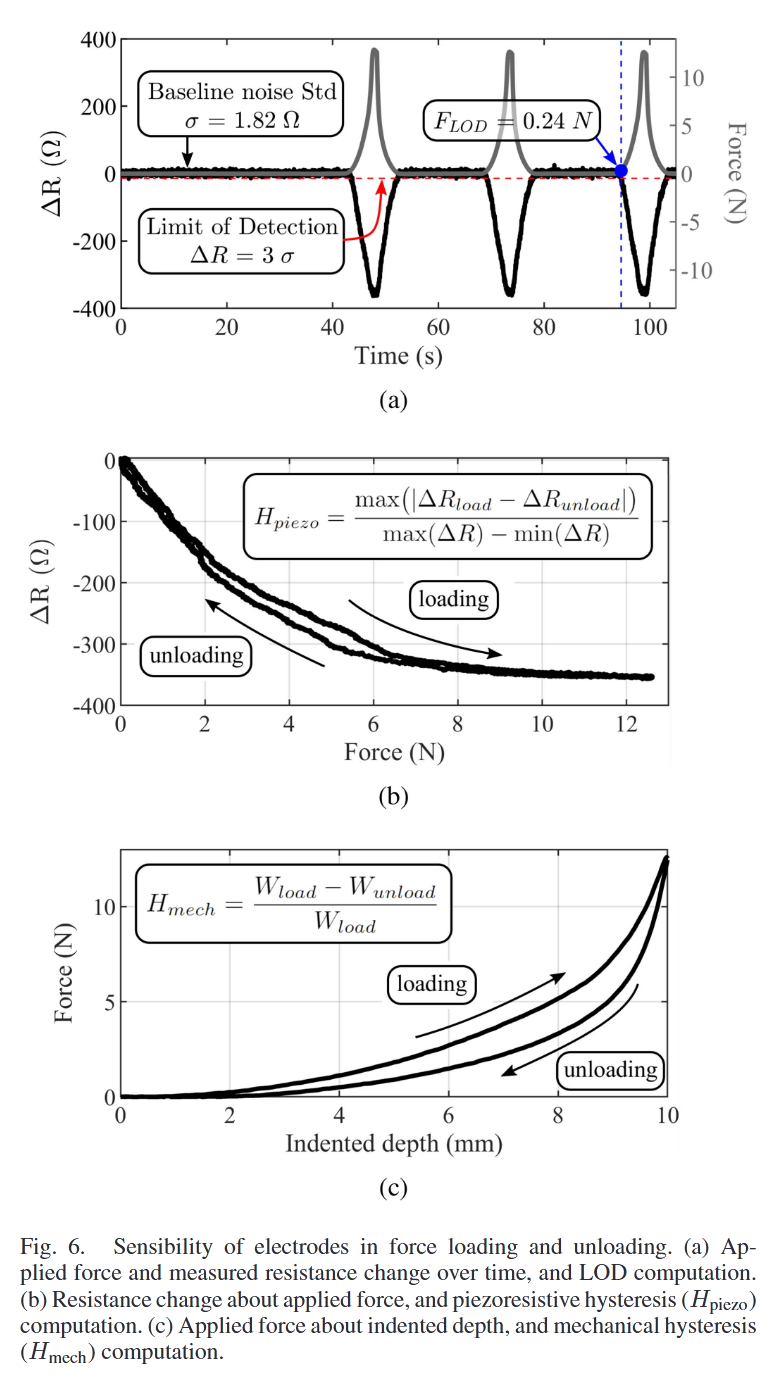
用压力测试仪往皮肤按(0-10mm 深),测电极的电阻变化(图 6):
- 最小能测 0.24N 的力(相当于一根筷子的重量压在皮肤上);
- 按的时候和松的时候电阻变化有小滞后(类似按海绵回弹慢一点),但不影响判断 “有没有按”。
四、装到机器人上:怎么适配真实机械臂?
之前是在亚克力板上测试,现在要贴到商用机械臂(UR5e)上,解决两个问题:机械臂不能打孔、电机有噪音。
1. 适配机械臂形状:3D 打印 “过渡底座”
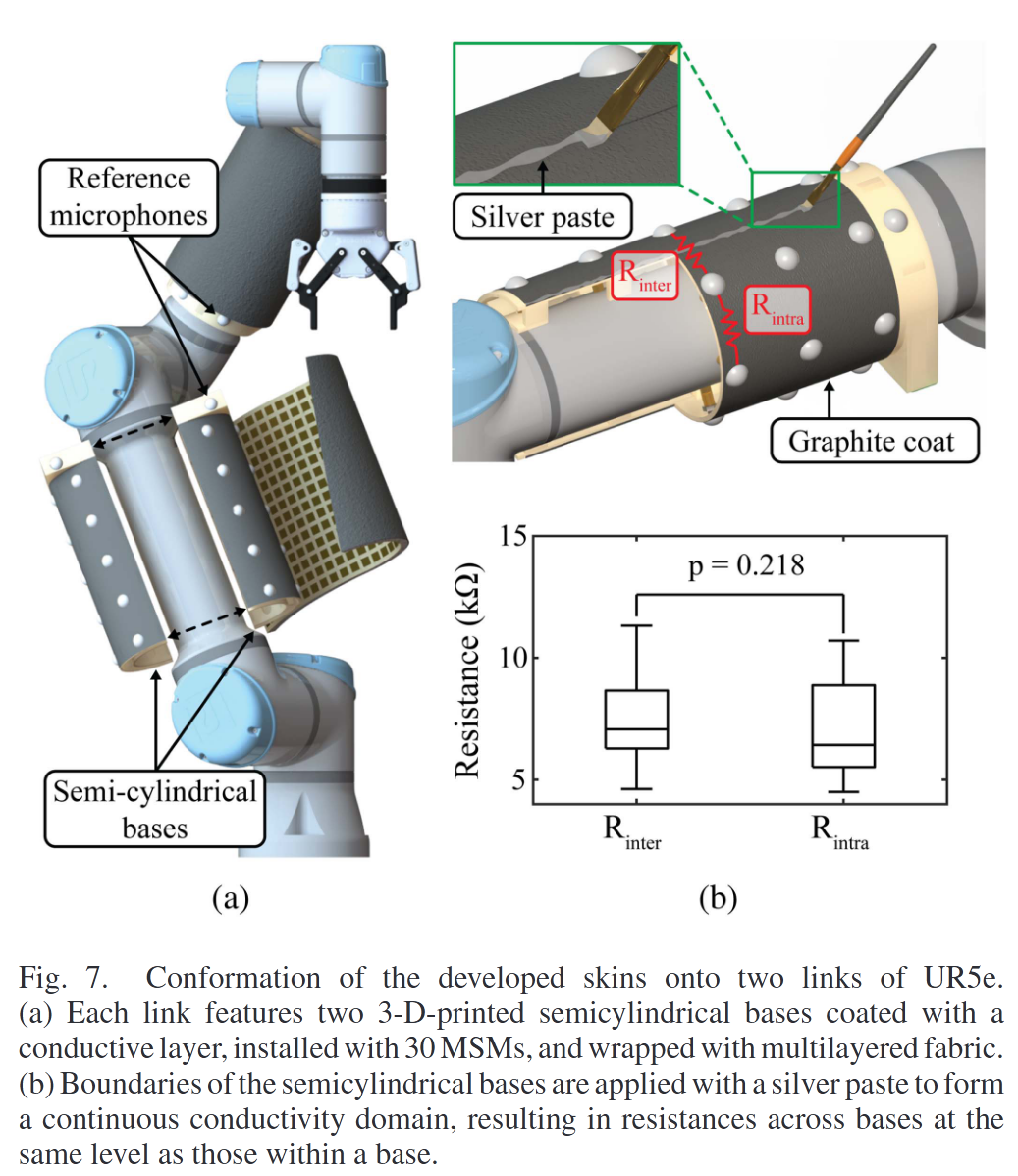
机械臂是圆柱形,还不能打孔,所以用 3D 打印 “半圆柱底座”(图 7a),两个半圆柱拼一个整圆柱套在机械臂上,每个底座装 30 个 MSM(6 组,每组 5 个,绕圆柱均匀分布);
- 底座接缝处涂银胶(图 7b),让两边的导电域连起来,测试发现接缝处和底座内部的电阻差不多,导电没问题。
2. 排除电机噪音:加 “参考麦克风”
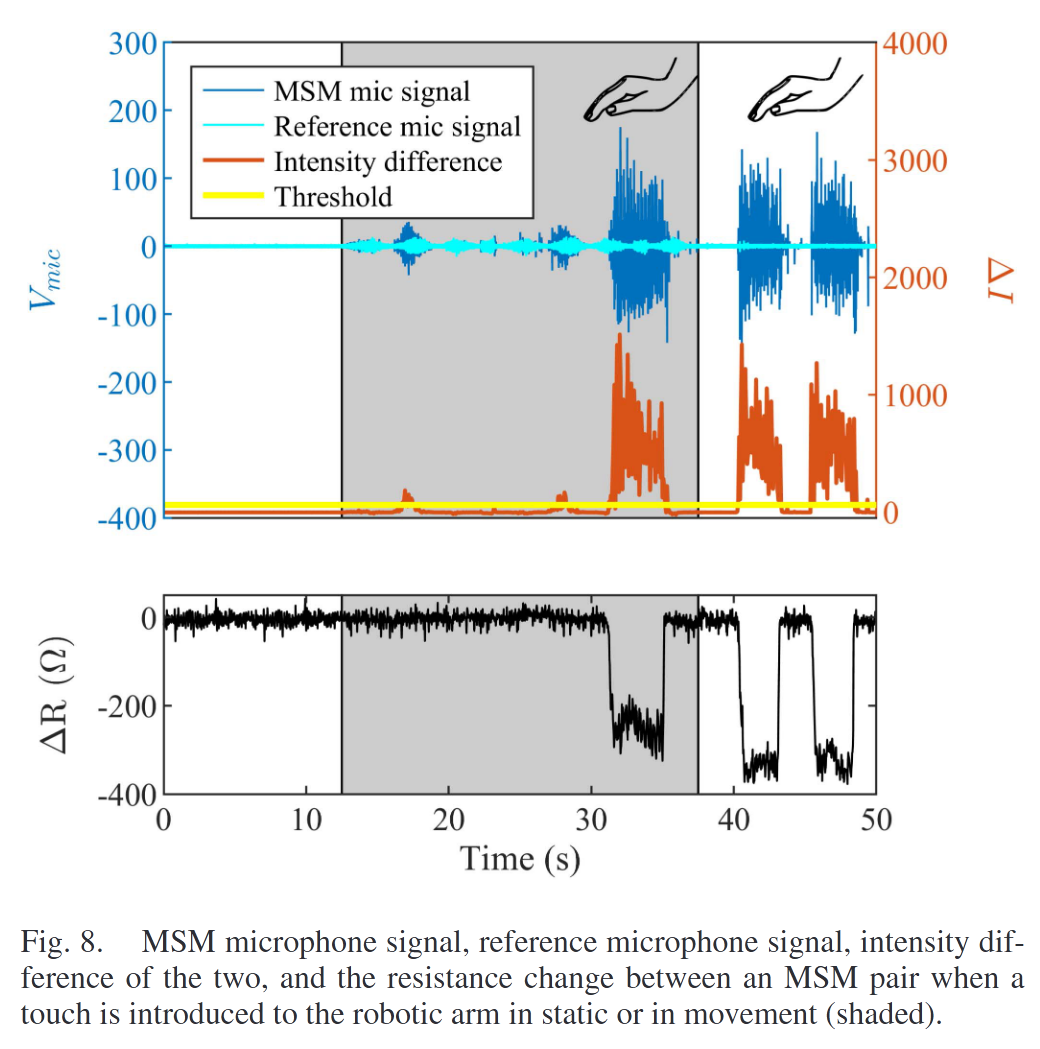
机械臂动的时候,电机振动会让麦克风误判成 “触摸”,所以在底座上装一个 “参考麦克风”(不贴多层织物,只听电机噪音)(图 8):
- 对比 MSM 麦克风和参考麦克风的信号差:如果差超过 3 倍噪音标准差,才算 “真触摸”;
- 比如机械臂动的时候,参考麦克风和 MSM 信号差不多(差小),算噪音;人拍一下,MSM 信号突然变大(差大),算真触摸。
五、触觉通信:机器人能 “懂” 触摸吗?
这是最终应用 —— 人摸机器人,机器人能识别触摸类型,做出对应反应,比如 “拍一下暂停,揉一揉继续搬东西”。
1. 编码:把触摸变成 “机器能读的图”
触摸有 “时间 + 空间” 特征,比如 “轻挠” 是高频、小范围,“按压” 是低频、大范围,把这些特征做成 4 个 “特征图”(图 9):
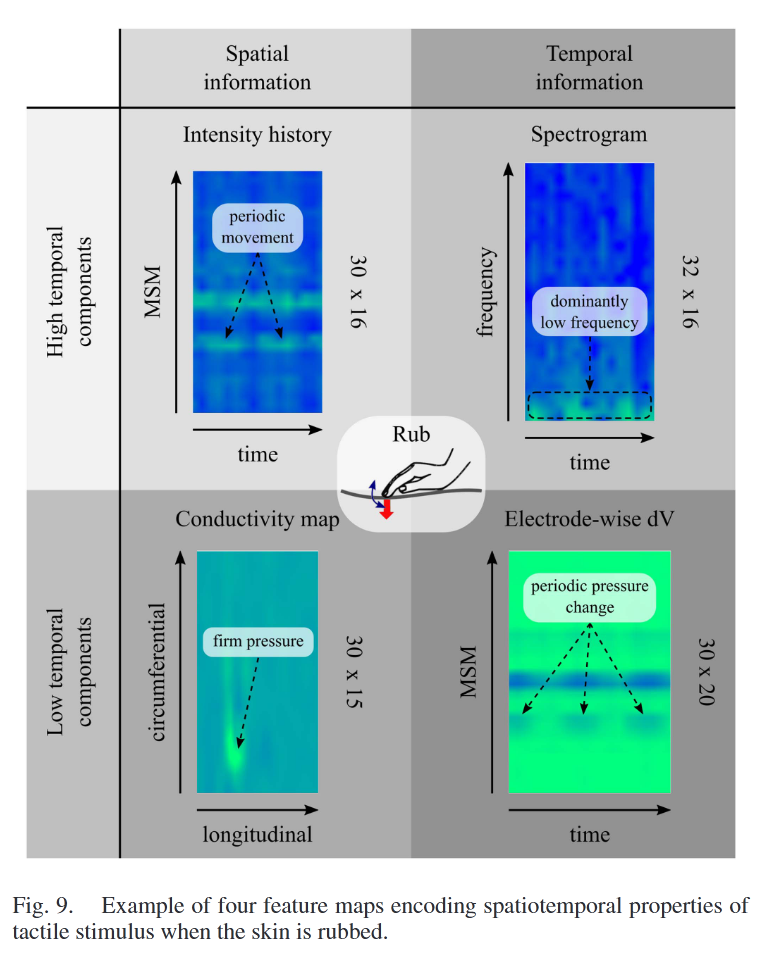
- 高频时间图:麦克风信号的频谱图(看振动频率变化);
- 高频空间图:所有麦克风的信号强度(看触摸在哪);
- 低频空间图:ERT 算的导电变化图(看按压范围);
- 低频时间图:电极的电压变化(看按压持续时间)。
2. 解码:用简单 CNN 识别触摸
用一个 “浅 CNN”(不复杂,适合机器人本地计算)来分类这 4 个图(图 10):
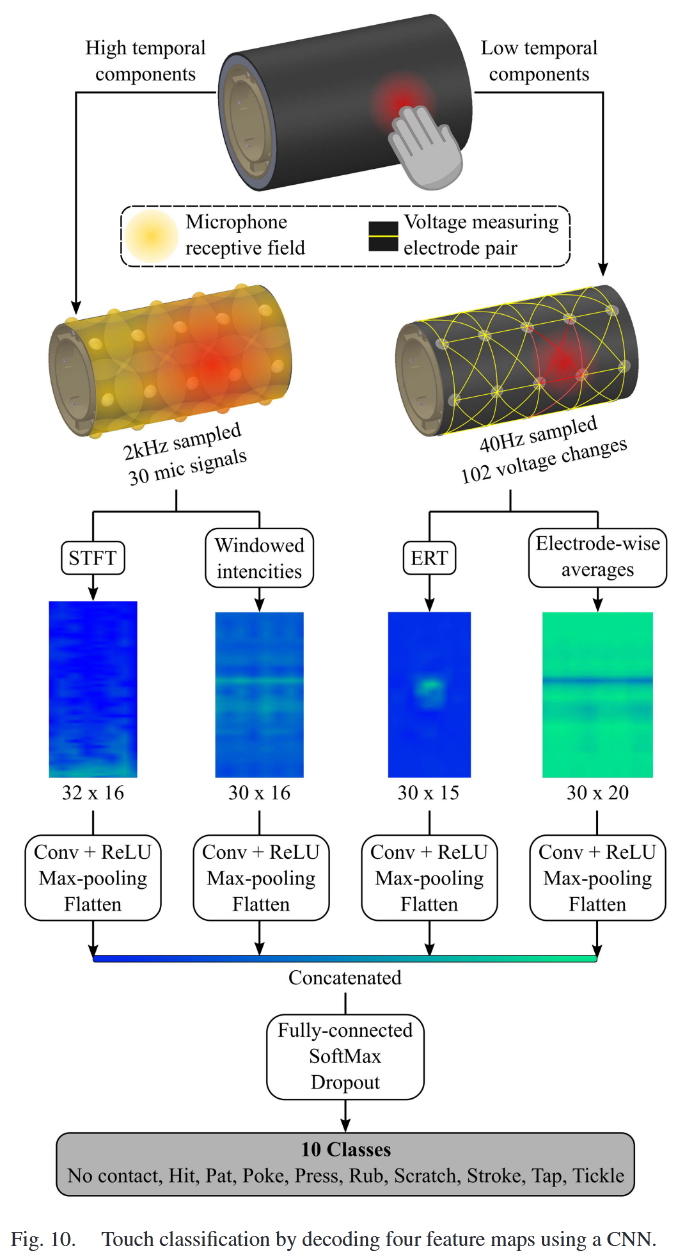
- 每个图先卷积(3×3 kernel,8 个,平衡精度和速度)、池化(缩小图的大小);
- 把 4 个图的结果拼起来,过 dropout(防过拟合)、全连接层,最后用 SoftMax 算 “是哪种触摸” 的概率;
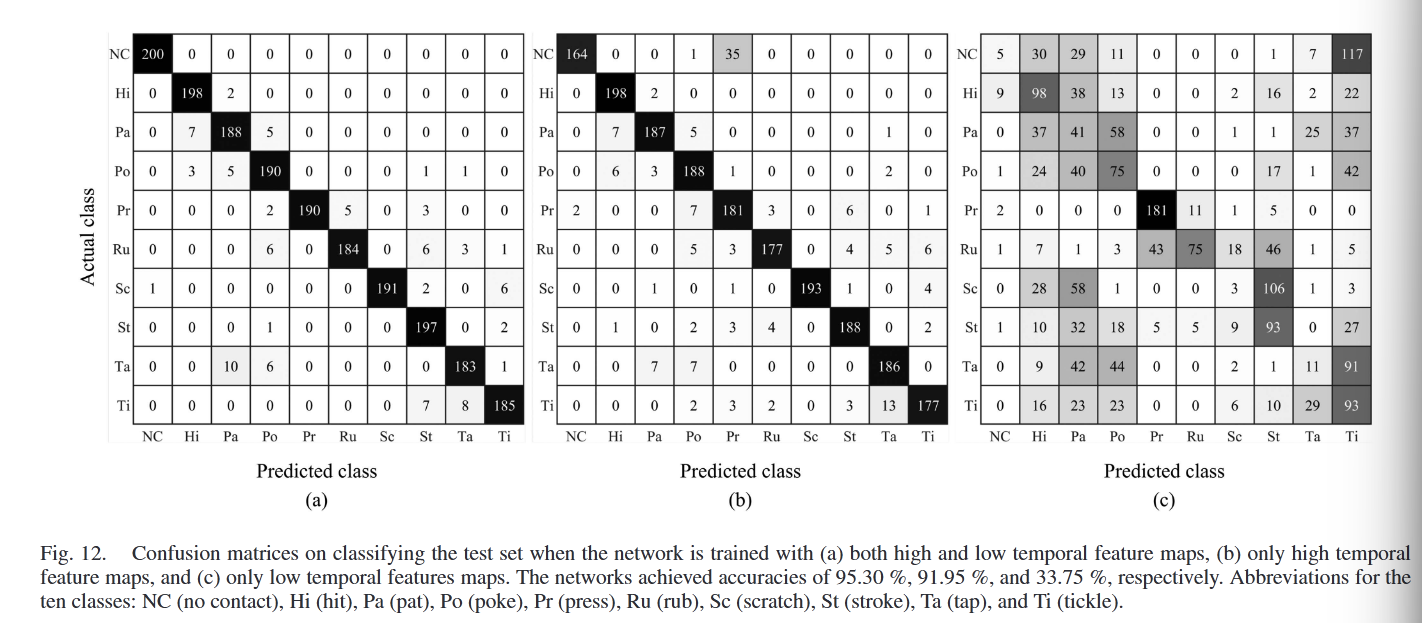
- 测试结果:9 种触摸 +“没触摸”,准确率 95.3%(图 12);如果只用高频信号(麦克风),准确率 91.95%(容易把 “按压” 当成 “没触摸”);只用低频信号(电极),准确率只有 33.75%(只能认 “按压”),说明多模态很重要。
3. 演示:不同触摸对应不同反应
在机械臂 “搬东西” 的时候测试(图 13):
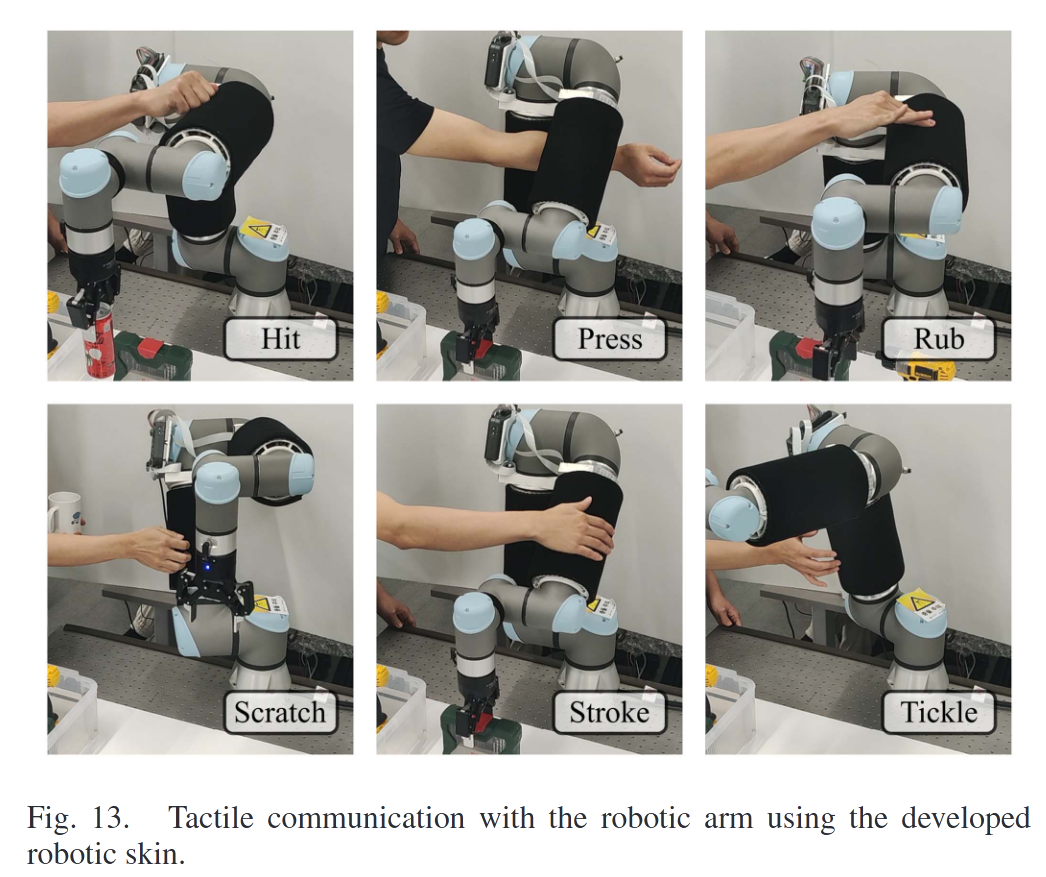
- 拍一下(Pat):机械臂暂停;
- 按一下(Press):机械臂放慢速度;
- 揉一揉(Rub):机械臂继续搬;
- 挠一挠(Tickle):机械臂微调位置。
六、核心创新点:这篇文章到底厉害在哪?
-
双重构机制互补:少元件也能广感知第一次把 “声学超分辨率(测高频振动)” 和 “电阻断层扫描(测低频压力)” 结合,只用少量 MSM(比如 30 个覆盖机械臂一节),就覆盖了人类互动中 90% 以上的触摸场景,解决了 “大面积覆盖就要多元件” 的痛点。
-
硬件一体化设计:一个模块干两件事MSM 模块把 “麦克风(测高频)” 和 “通风螺丝电极(测低频)” 集成在一起,多层织物同时支持 “传振动” 和 “变导电”,不用分开装两种传感器,简化了结构,还能贴在各种形状的机器人上(圆柱、平面)。
-
工程化优化:能装到真实机器人上用
- 用 3D 打印底座解决机械臂不能打孔的问题,银胶连导电域;
- 加参考麦克风排除电机噪音,避免误判;
- 用 FPGA 并行处理 + 浅 CNN,在嵌入式系统(2.6W 低功耗)上实时计算,不用连电脑,机器人能 “自己思考” 触摸。
-
实用的触觉分类:准确率高且覆盖常用触摸能识别 9 种人类常用触摸(打、拍、按、挠等),准确率 95.3%,比只用单模态的方案好很多,还能定位触摸位置,真正实现了 “触觉通信”,不是实验室里的摆设。