Franka Research3 使用问题记录
有用的学习链接:
你真的了解Franka吗?一文带你揭秘Franka常见问题,你想知道的都在这里!(附产品手册)
技术要点分享:Franka机器人常见的10个问题——硬件篇,一文干货汇总
Franka最新FR3机器人从开箱到使用的过程
FRANKA APP详细讲解(1)
Franka机器人APP详细讲解(2)
技术要点分享:Franka机器人开箱和上电指导
PNP机器人培训课程:Franka Hand使用及常用报错分析
PNP机器人培训课程——Franka机器人IP地址设置指南
1. 示教时候遇到白灯转黄灯
这里进入了奇异点
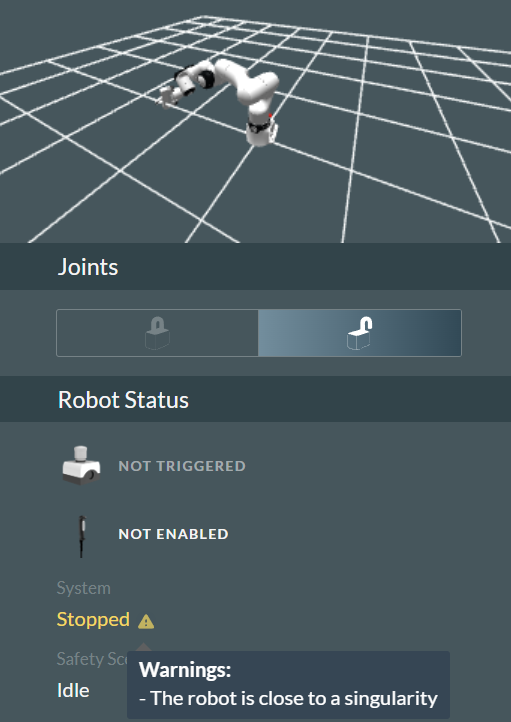
解决办法:示教模式,移动一下关节,离开奇异点,状态灯会转为白色
2. 示教时,按键用力过大,导致进入急停,白灯转红灯,此时需要重启机器人
Franka机器人的最简单硬件连接
需要一台电脑,机器人控制柜,机器人。
机器人控制柜插上电,然后机器人和控制柜子连接。
电脑1. 可以通过网线连接机器人底座的网口(有dhcp服务)2. 可以通过网线连接控制柜的网口(无dhcp,需要配置电脑的有线网口和控制柜网口在同一个子网)
两种方式,电脑都可以通过浏览器,输入机器人/控制柜网口地址,进入机器人控制app desk
FCL控制使用
使用libfranka的版本 对于fr3 有固件版本的匹配问题 这里0.15.0版本ok
libfranka: Incompatible library version (server version: 9, library version: 6)
都是使用官网的来安装frank_ros, 注意git checkout noetic_devel
使用官方的 franka_ros中的 urdf 去配置 moveit_assittant 生成config文件。然后在demo里面,选择使用ros_controller 然后添加franka_control中的controller参数并启动相应的controller。
启动demo.launch和franka_control中 franka_control.launch 一个能够实现拖动规划,另一个则能和硬件交互