第十五届蓝桥杯单片机组4T模拟赛三(第二套)
本套试题在4T平台中的名字为第15届蓝桥杯单片机组模拟考试三,不知道哪套是4T的模拟赛,所以两套都敲一遍练练手感。
为了代码呈现美观,本文章前面的各个模块在main函数中的处理函数均未添加退出处理,在最后给出的完整代码中体现。
附件:第15届蓝桥杯单片机组模拟考试三
一、准备工作
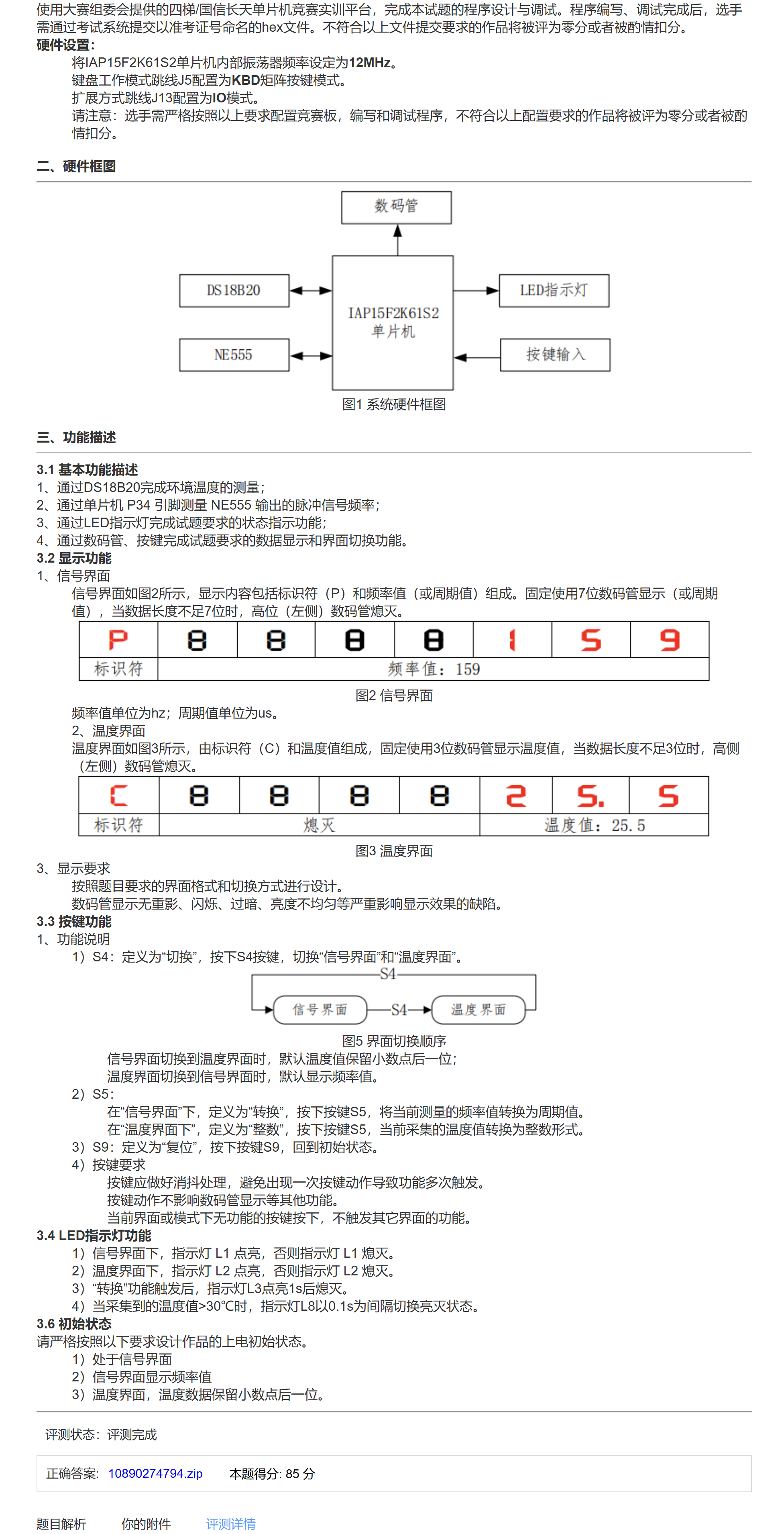
1.阅读系统框架
由系统框架图得知,等会创建工程时需要编写的底层模块有:
- 初始化模块(Init.h,Init.c)
- 指示灯模块(Led.h,Led.c)
- 数码管模块(Seg.h,Seg.c)
- 温度传感器模块(ds18b20.h,ds18b20.c)
- 按键模块(key.h,key.c)
这些底层函数在作者的专栏《蓝桥杯单片机模板搭建系列》中都详细地讲解了怎么去实现,如果读者有不懂的可以点击下面的链接。
蓝桥杯单片机模板搭建系列
2.阅读题目了解题意
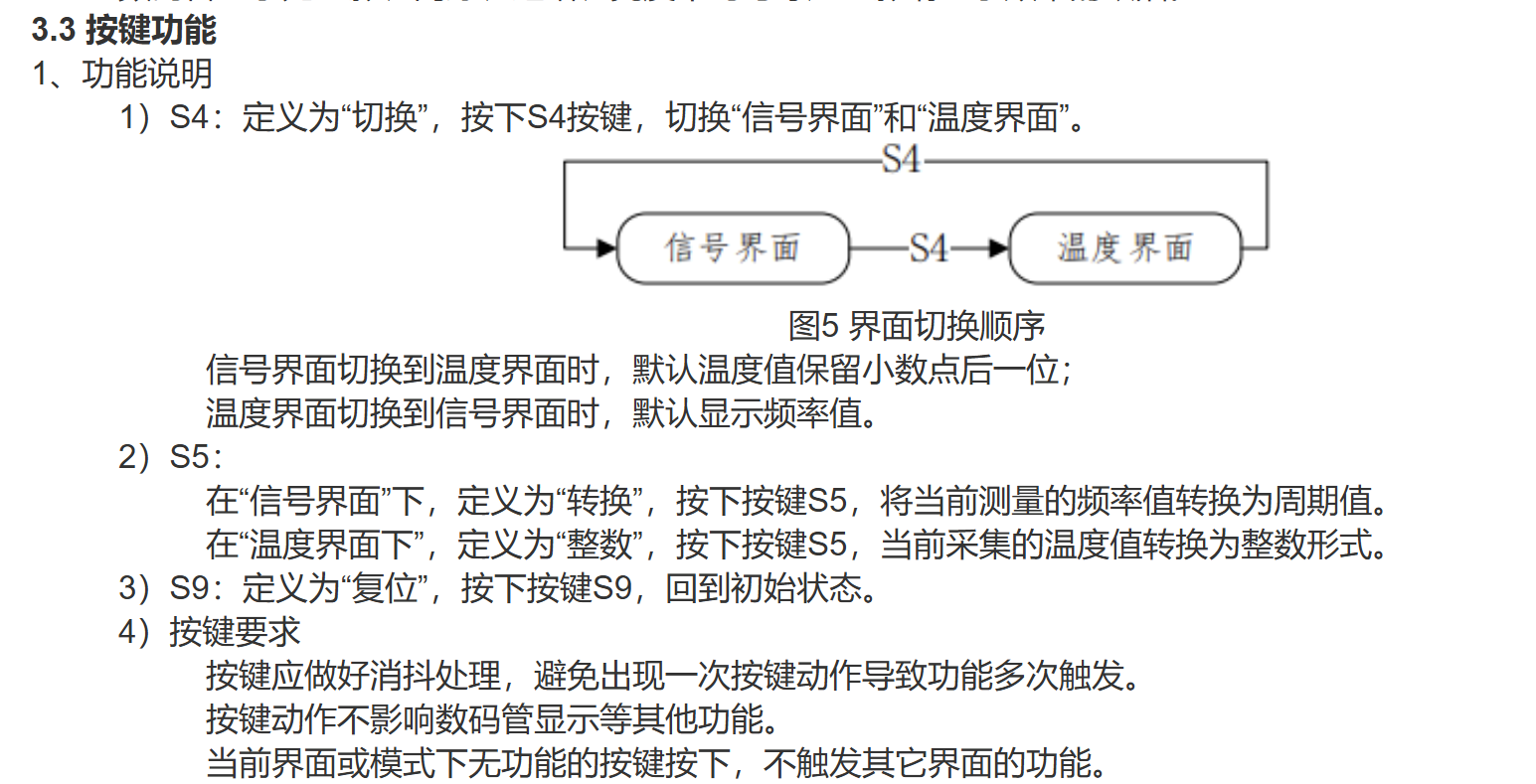
- 按键只使用了S4、S5和S8,并且没有错误按键次数的判断,所以写按键时可以只写S4、S5和S8的。
- 数码管显示字母用到
P和C的段码,在数码管底层函数记得添加。 - 页面显示只有两个页面,所以为了更简单地实现页面流转,可以定义bit型变量SegMode控制页面流转(为0时对应信号界面,为1时对应温度界面)
- 由于涉及NE555,所以需要使用定时器0去计数,定时器1去计时,同时屏蔽掉按键模块中对P34的赋值
二、数码管模块
1.Seg.h
#ifndef __Seg_H__
#define __Seg_H__
void SegDisp(unsigned char wela, unsigned char dula, unsigned char point);
#endif
2.Seg.c
#include <STC15F2K60S2.H>
code unsigned char Seg_Table[] =
{
0xc0, //0
0xf9, //1
0xa4, //2
0xb0, //3
0x99, //4
0x92, //5
0x82, //6
0xf8, //7
0x80, //8
0x90, //9
0xff, //空
0x8c, //P
0xc6, //C
};
void SegDisp(unsigned char wela, unsigned char dula, unsigned char point)
{
P0 = 0xff;
P2 = P2 & 0x1f | 0xe0;
P2 &= 0x1f;
P0 = (0x01 << wela);
P2 = P2 & 0x1f | 0xc0;
P2 &= 0x1f;
P0 = Seg_Table[dula];
if(point)
P0 &= 0x7f;
P2 = P2 & 0x1f | 0xe0;
P2 &= 0x1f;
}
3.NE555
NE555在底层搭建系列也已经讲过了,这边直接给出代码
void Timer0_Init(void) //1毫秒@12.000MHz
{
AUXR &= 0x7F; //定时器时钟12T模式
TMOD &= 0xF0; //设置定时器模式
TMOD |= 0x05; //设置定时器模式
TL0 = 0; //设置定时初始值
TH0 = 0; //设置定时初始值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
}
void Timer1_Init(void) //1毫秒@12.000MHz
{
AUXR &= 0xBF; //定时器时钟12T模式
TMOD &= 0x0F; //设置定时器模式
TL1 = 0x18; //设置定时初始值
TH1 = 0xFC; //设置定时初始值
TF1 = 0; //清除TF1标志
TR1 = 1; //定时器1开始计时
ET1 = 1; //使能定时器1中断
EA = 1;
}
void Timer1_Isr(void) interrupt 3
{
//systick++;调度器使用
if(++SegPos == 8)
SegPos = 0;
SegDisp(SegPos,SegBuf[SegPos],SegPoint[SegPos]);
if(++Time_1s == 1000)
{
Time_1s = 0;
f = (TH0 << 8) | TL0;
TH0 = TL0 = 0;
}
}
4.main.c中的数码管处理函数SegProc
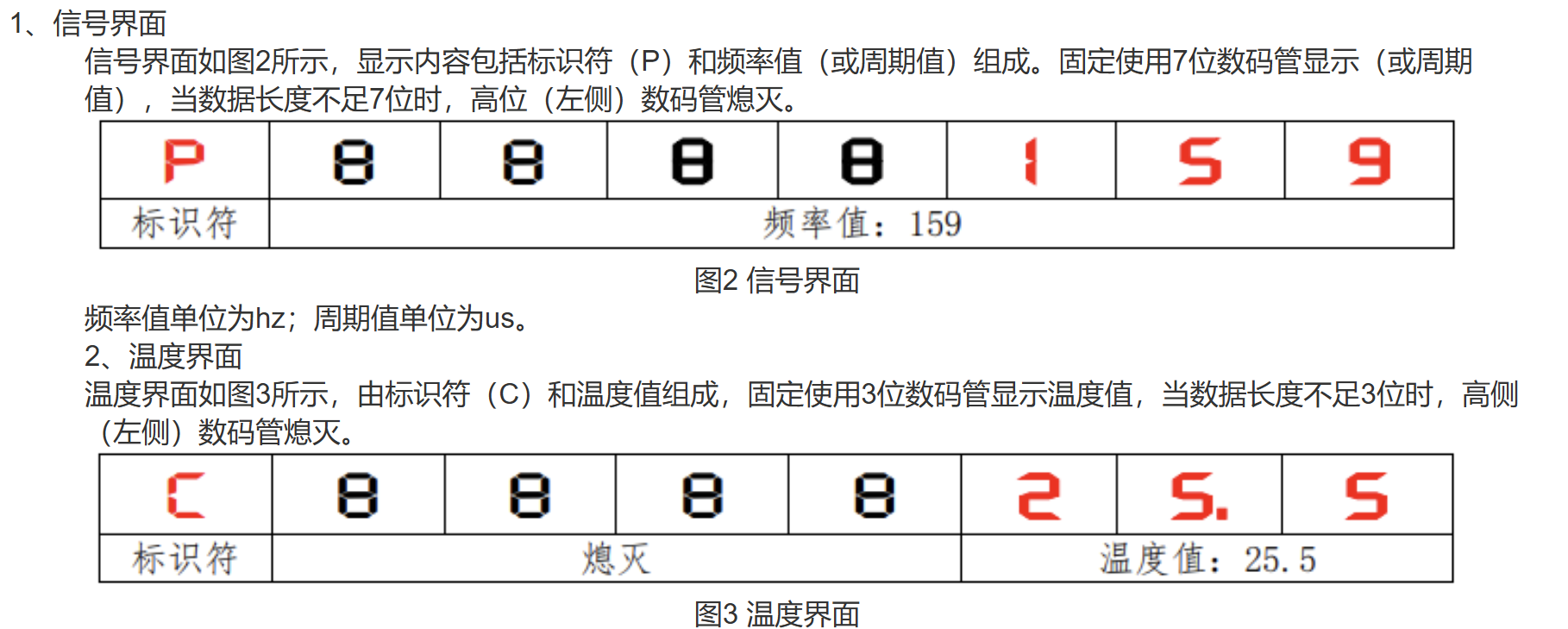
信号界面
用bit型变量SegMode来控制页面流转,当SegMode等于0时,对应显示界面为NE555频率测量,NE555的上限值大概在31000多,所以第一位和第二位数码管直接熄灭即可(最左边的数码管为第零位数码管),显示界面还需要进行高位为0熄灭的判断,这个也是很简单的,代码如下:
void SegProc()
{
unsigned char i;
if(!SegMode)
{
SegBuf[0] = 11;
SegBuf[1] = 10;
SegBuf[2] = 10;
SegBuf[3] = f / 10000 % 10;
SegBuf[4] = f / 1000 % 10;
SegBuf[5] = f / 100 % 10;
SegBuf[6] = f / 10 % 10;
SegPoint[6] = 0;
SegBuf[7] = f % 10;
//高位熄灭处理
i = 3;
while(SegBuf[i] == 0)
{
SegBuf[i] = 10;
if(++i == 7)
break;
}
}
}
温度界面
ds18b20底层代码
#ifndef __ds18b20_H__
#define __ds18b20_H__
float TemRead();
#endif
#include <STC15F2K60S2.H>
sbit DQ = P1^4;
void Delay_OneWire(unsigned int t)
{
unsigned char i;
while(t--){
for(i=0;i<12;i++);
}
}
//
void Write_DS18B20(unsigned char dat)
{
unsigned char i;
for(i=0;i<8;i++)
{
DQ = 0;
DQ = dat&0x01;
Delay_OneWire(5);
DQ = 1;
dat >>= 1;
}
Delay_OneWire(5);
}
//
unsigned char Read_DS18B20(void)
{
unsigned char i;
unsigned char dat;
for(i=0;i<8;i++)
{
DQ = 0;
dat >>= 1;
DQ = 1;
if(DQ)
{
dat |= 0x80;
}
Delay_OneWire(5);
}
return dat;
}
//
bit init_ds18b20(void)
{
bit initflag = 0;
DQ = 1;
Delay_OneWire(12);
DQ = 0;
Delay_OneWire(80);
DQ = 1;
Delay_OneWire(10);
initflag = DQ;
Delay_OneWire(5);
return initflag;
}
float TemRead()
{
idata unsigned char tem_low, tem_hig;
init_ds18b20();
Write_DS18B20(0xcc);
Write_DS18B20(0x44);
init_ds18b20();
Write_DS18B20(0xcc);
Write_DS18B20(0xbe);
tem_low = Read_DS18B20();
tem_hig = Read_DS18B20();
return ((tem_hig << 8) | tem_low) / 16.0;
}
SegMode为1时,对应温度读取界面,由于作者个人习惯不喜欢使用float型变量,所以在这边使用的是unsigned int型变量Tem_10x(将温度放大10倍),这边也是给出两种写法。
写法一:定义float型变量
//取余变量声明、函数声明、头文件引用均省略
idata float Tem;
void SegProc()
{
if(!SegMode)
{
//省略
}
else
{
SegBuf[0] = 12;
SegBuf[1] = 10;
SegBuf[2] = 10;
SegBuf[3] = 10;
SegBuf[4] = 10;
SegBuf[5] = (unsigned char)Tem / 10;
SegBuf[6] = (unsigned char)Tem % 10;
SegPoint[6] = 1;
SegBuf[7] = (unsigned char)(Tem * 10) % 10;
}
}
void TemProc()
{
Tem = TemRead();
}
写法二:定义unsigned int型变量
idata unsigned int Tem;
void SegProc()
{
if(!SegMode)
{
//省略
}
else
{
SegBuf[0] = 12;
SegBuf[1] = 10;
SegBuf[2] = 10;
SegBuf[3] = 10;
SegBuf[4] = 10;
SegBuf[5] = Tem_10x / 100;
SegBuf[6] = Tem_10x / 10 % 10;
SegPoint[6] = 1;
SegBuf[7] = Tem_10x % 10;
}
}
void TemProc()
{
Tem_10x = TemRead() * 10;
}
采集频率
- 在信号页面按下S5为频率数据采集,此时数码管显示周期。
- 周期 =
1
频率
\frac{1}{频率}
频率1 * 10
6
^6
6(1s=10
6
u
s
^6us
6us)
定义bit型变量FreMode控制信号页面的数据显示 - FreMode为0时,显示频率,为1时,显示周期。
- 如果频率值为1时,周期为100 0000us,所以高位熄灭的判断要从数码管第一位开始判断。
void SegProc()
{
unsigned char i;
if(!SegMode)
{
SegBuf[0] = 11;
if(!FreMode)
{
//频率显示页面
}
else
{
T = 1000000 / f;
SegBuf[1] = T / 1000000 % 10;
SegBuf[2] = T / 100000 % 10;
SegBuf[3] = T / 10000 % 10;
SegBuf[4] = T / 1000 % 10;
SegBuf[5] = T / 100 % 10;
SegBuf[6] = T / 10 % 10;
SegPoint[6] = 0;
SegBuf[7] = T % 10;
//高位数据为0熄灭判断
i = 1;
while(SegBuf[i] == 0)
{
SegBuf[i] = 10;
if(++i == 7)
break;
}
}
}
}
温度取整
- 温度界面按下S5时将温度保留整数后在数码管中显示,这个时候应在数码管的低二位(最右边两个数码管)显示温度数据。
- 同样的,定义bit型变量TemMode来控制温度显示页面的数据显示。
else//温度页面
{
SegBuf[0] = 12;
SegBuf[1] = 10;
SegBuf[2] = 10;
SegBuf[3] = 10;
SegBuf[4] = 10;
/*
if(!TemMode)
{
SegBuf[5] = Tem_10x / 100;
SegBuf[6] = Tem_10x / 10 % 10;
SegPoint[6] = 1;
SegBuf[7] = Tem_10x % 10;
}
*/
else//温度整数显示
{
SegBuf[5] = 10;
SegBuf[6] = Tem_10x / 100;
SegBuf[7] = Tem_10x / 10 % 10;
SegPoint[6] = 0;
}
}
5.数码管模块完整代码
void SegProc()
{
unsigned char i;
if(!SegMode)
{
SegBuf[0] = 11;
if(!FreMode)
{
SegBuf[1] = 10;
SegBuf[2] = 10;
SegBuf[3] = f / 10000 % 10;
SegBuf[4] = f / 1000 % 10;
SegBuf[5] = f / 100 % 10;
SegBuf[6] = f / 10 % 10;
SegPoint[6] = 0;
SegBuf[7] = f % 10;
i = 3;
while(SegBuf[i] == 0)
{
SegBuf[i] = 10;
if(++i == 7)
break;
}
}
else
{
T = 1000000 / f;
SegBuf[1] = T / 1000000 % 10;
SegBuf[2] = T / 100000 % 10;
SegBuf[3] = T / 10000 % 10;
SegBuf[4] = T / 1000 % 10;
SegBuf[5] = T / 100 % 10;
SegBuf[6] = T / 10 % 10;
SegPoint[6] = 0;
SegBuf[7] = T % 10;
i = 1;
while(SegBuf[i] == 0)
{
SegBuf[i] = 10;
if(++i == 7)
break;
}
}
}
else
{
SegBuf[0] = 12;
SegBuf[1] = 10;
SegBuf[2] = 10;
SegBuf[3] = 10;
SegBuf[4] = 10;
if(!TemMode)
{
SegBuf[5] = Tem_10x / 100;
SegBuf[6] = Tem_10x / 10 % 10;
SegPoint[6] = 1;
SegBuf[7] = Tem_10x % 10;
}
else
{
SegBuf[5] = 10;
SegBuf[6] = Tem_10x / 100;
SegBuf[7] = Tem_10x / 10 % 10;
SegPoint[6] = 0;
}
}
}
三、按键模块
1.按键底层代码
#ifndef __Key_H__
#define __Key_H__
unsigned char KeyDisp();
#endif
#include <STC15F2K60S2.H>
unsigned char KeyDisp()
{
unsigned char temp = 0x00;
P44 = 0;
P42 = 1;
P35 = 1;
if(P32 == 0) temp = 5;
if(P33 == 0) temp = 4;
P44 = 1;
P42 = 0;
P35 = 1;
if(P32 == 0) temp = 9;
return temp;
}
2.按键实现
按键模块特别简单,直接给出代码
这边注意的是,SegMode、FreMode、TemMode在前文中都已经定义成bit型变量,bit型变量是嵌入式系统设计中特有的变量,它的取值只有0和1,所以在按键S4、S5的变量取反可以使用下面两种方法实现:
SegMode = !SegMode;
SegMode ^= 1;
3.按键模块完整代码:
void KeyProc()
{
KeyVal = KeyDisp();
KeyDown = KeyVal & ~KeyOld;
KeyDown = ~KeyVal & KeyOld;
KeyOld = KeyVal;
switch(KeyDown)
{
case 4:
SegMode ^= 1;
break;
case 5:
if(!SegMode)
{
/*在下文的Led模块实现
if(!FreMode)
CountFlag = 1;
*/
FreMode ^= 1;
}
else
TemMode ^= 1;
break;
case 9:
SegMode = 0;
FreMode = 0;
TemMode = 0;
break;
}
}
四、Led模块
1.Led底层代码
#ifndef __Led_H__
#define __Led_H__
void LedDisp(unsigned char *ucLed);
#endif
#include <STC15F2K60S2.H>
void LedDisp(unsigned char *ucLed)
{
unsigned char i, temp = 0x00;
static unsigned char temp_old = 0xff;
for(i = 0; i < 8; i++)
temp |= (ucLed[i] << i);
if(temp != temp_old)
{
P0 = ~temp;
P2 = P2 & 0x1f | 0x80;
P2 &= 0x1f;
temp_old = temp;
}
}

2.L1、L2
L1、L2的点亮逻辑很简单
读者可以使用下面的代码也可以使用if-else语句或者三目运算符。
void LedProc()
{
ucLed[0] = !SegMode;
ucLed[1] = SegMode;
}
3.L3
- L3的点亮逻辑是在信号页面激活采集功能后,L3点亮1s后熄灭,这边要注意的是,L3点亮是当采集功能激活后点亮的,而且1s后就要熄灭,没有进行其他操作时不能重复点亮。
- 定时点亮、定时熄灭逻辑:定义时间变量以及指示灯标志位,时间变量在定时器内计时,当时间变量达到指定时间时,时间变量复位,指示灯标志位开启/关闭。
- 本题实现方法有很多,下面给出我能想到的最简单的方法,如果读者有更简单的方法,欢迎评论区讨论。
/*有关于L3的变量定义*/
idata unsigned int Time_1s_Led;
/*
*CountFlag两个作用:
*1.CountFlag置1时,Time_1s_Led开始计时
*CountFlag置0时,Time_1s_Led复位
*2.ucLed[2] = CountFlag,即L3是否点亮决定于CountFlag
*/
idata bit CountFlag;
//CountFlag激活地
void KeyProc()
{
switch(KeyDown)
{
case 5:
if(!SegMode)
{
if(!FreMode)
CountFlag = 1;//只有跳转到采集界面才激活CountFlag
FreMode ^= 1;
}
}
}
//Led
void LedProc()
{
ucLed[2] = CountFlag;
}
//定时器1中断服务函数
void Timer1_Isr(void) interrupt 3
{
//其它省略
if(CountFlag)//开灯计时
{
if(++Time_1s_Led == 1000)
{
Time_1s_Led = 0;//复位
CountFlag = 0;//关灯
}
}
}
4.L4
- L4的点亮逻辑是实时温度超过40°时L4以100ms为间隔闪烁
- 指示灯闪烁的逻辑很简单,定义一个计时变量和一个Led点亮标志位,定时器中断中计时变量达到特定时间时,将Led点亮标志位取反,让ucLed[2] = Led点亮标志位,这样就可以实现指示灯闪烁
idata unsigned char Time_100ms;
idata bit LedFlah;//当实时温度>40°时,标志位置1
idata bit LedFlash;//L4使能标志位
void TemProc()
{
Tem_10x = TemRead() * 10;
LedFlag = (Tem_10x > 300);
}
void LedProc()
{
ucLed[7] = LedFlash;
}
void Timer1_Isr(void) interrupt 3
{
if(LedFlag)
{
if(++Time_100ms == 100)
{
Time_100ms = 0;
LedFlash ^= 1;
}
}
else
{
Time_100ms = 0;
LedFlash = 0;
}
}
五、完整代码
完整代码的思路是没有问题的,已经通过4T评测了,完整代码是根据以上代码片段拼凑起来的,如果读者用以下代码搭建的工程不能完整实现工程或者报错,请及时联系我。
#include <STC15F2K60S2.H>
#include "Init.h"
#include "Key.h"
#include "Seg.h"
#include "Led.h"
#include "ds18b20.h"
typedef unsigned char u8;
typedef unsigned int u16;
typedef unsigned long int u32;
idata u8 Key_Slow; //按键减速变量 10ms
idata u8 Seg_Slow; //数码管减速变量 500ms
idata u8 SegPos;
idata u8 KeyVal, KeyDown, KeyUp, KeyOld;
idata u8 Time_100ms;
pdata u8 SegBuf[8] = {10,10,10,10,10,10,10,10};
pdata u8 SegPoint[8] = {0,0,0,0,0,0,0,0};
pdata u8 ucLed[8] = {0,0,0,0,0,0,0,0};
idata u16 Time_1s, f;
idata u16 Tem_10x;
idata u16 T;
idata u16 Time_1s_Led;
idata bit SegMode;
idata bit FreMode;
idata bit TemMode;
idata bit CountFlag;
idata bit LedFlag;
idata bit LedFlash;
void KeyProc()
{
if(Key_Slow) return;
Key_Slow = 1; //按键减速
KeyVal = KeyDisp();
KeyDown = KeyVal & ~KeyOld;
KeyDown = ~KeyVal & KeyOld;
KeyOld = KeyVal;
switch(KeyDown)
{
case 4:
SegMode ^= 1;
break;
case 5:
if(!SegMode)
{
if(!FreMode)
CountFlag = 1;
FreMode ^= 1;
}
else
TemMode ^= 1;
break;
case 9:
SegMode = 0;
FreMode = 0;
TemMode = 0;
break;
}
}
void SegProc()
{
unsigned char i;
if(Seg_Slow) return;
Seg_Slow = 1; //数码管减速
Tem_10x = TemRead() * 10;
LedFlag = (Tem_10x > 300);
if(!SegMode)
{
SegBuf[0] = 11;
if(!FreMode)
{
SegBuf[1] = 10;
SegBuf[2] = 10;
SegBuf[3] = f / 10000 % 10;
SegBuf[4] = f / 1000 % 10;
SegBuf[5] = f / 100 % 10;
SegBuf[6] = f / 10 % 10;
SegPoint[6] = 0;
SegBuf[7] = f % 10;
i = 3;
while(SegBuf[i] == 0)
{
SegBuf[i] = 10;
if(++i == 7)
break;
}
}
else
{
T = 1000000 / f;
SegBuf[1] = T / 1000000 % 10;
SegBuf[2] = T / 100000 % 10;
SegBuf[3] = T / 10000 % 10;
SegBuf[4] = T / 1000 % 10;
SegBuf[5] = T / 100 % 10;
SegBuf[6] = T / 10 % 10;
SegPoint[6] = 0;
SegBuf[7] = T % 10;
i = 1;
while(SegBuf[i] == 0)
{
SegBuf[i] = 10;
if(++i == 7)
break;
}
}
}
else
{
SegBuf[0] = 12;
SegBuf[1] = 10;
SegBuf[2] = 10;
SegBuf[3] = 10;
SegBuf[4] = 10;
if(!TemMode)
{
SegBuf[5] = Tem_10x / 100;
SegBuf[6] = Tem_10x / 10 % 10;
SegPoint[6] = 1;
SegBuf[7] = Tem_10x % 10;
}
else
{
SegBuf[5] = 10;
SegBuf[6] = Tem_10x / 100;
SegBuf[7] = Tem_10x / 10 % 10;
SegPoint[6] = 0;
}
}
}
void LedProc()
{
ucLed[0] = !SegMode;
ucLed[1] = SegMode;
ucLed[2] = CountFlag;
ucLed[7] = LedFlash;
LedDisp(ucLed);
}
void Timer0_Init(void) //1毫秒@12.000MHz
{
AUXR &= 0x7F; //定时器时钟12T模式
TMOD &= 0xF0; //设置定时器模式
TMOD |= 0x05; //设置定时器模式
TL0 = 0; //设置定时初始值
TH0 = 0; //设置定时初始值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
}
void Timer1_Init(void) //1毫秒@12.000MHz
{
AUXR &= 0xBF; //定时器时钟12T模式
TMOD &= 0x0F; //设置定时器模式
TL1 = 0x18; //设置定时初始值
TH1 = 0xFC; //设置定时初始值
TF1 = 0; //清除TF1标志
TR1 = 1; //定时器1开始计时
ET1 = 1; //使能定时器1中断
EA = 1;
}
void Timer1_Isr(void) interrupt 3
{
if(++Key_Slow == 10) Key_Slow = 0; //按键延迟
if(++Seg_Slow == 200) Seg_Slow = 0; //数码管延迟
if(++SegPos == 8) SegPos = 0;
SegDisp(SegPos,SegBuf[SegPos],SegPoint[SegPos]);
if(++Time_1s == 1000)
{
Time_1s = 0;
f = (TH0 << 8) | TL0;
TH0 = TL0 = 0;
}
if(CountFlag)
{
if(++Time_1s_Led == 1000)
{
Time_1s_Led = 0;
CountFlag = 0;
}
}
if(LedFlag)
{
if(++Time_100ms == 100)
{
Time_100ms = 0;
LedFlash ^= 1;
}
}
else
{
Time_100ms = 0;
LedFlash = 0;
}
}
void main()
{
SystemInit();
Timer0_Init();
Timer1_Init();
while(1)
{
KeyProc();
SegProc();
LedProc();
}
}