基于NUC和STM32F103的无人车
ref:基于ROS移动机器人SLAM算法的研究
1. 硬件架构
机器人采用了一个由 NUC 和 STM32F103驱动板构成的双系统架构。
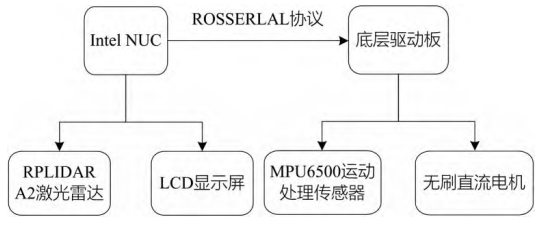
2. 软件架构
Intel NUC 运行 Ubuntu18.04 操作系统,搭载 ROS 系统 Melodic 版本,ROS具有节点单元的通信方式,保证了数据的一致性和运算的正确性
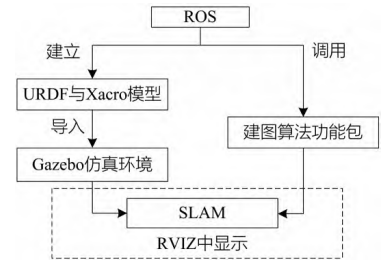
3. SLAM算法框架及Launch配置
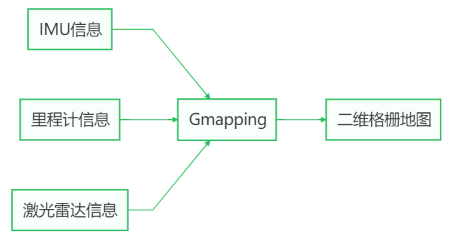
GMapping
<launch><arg name="scan_topic" default="scan" /><node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen" clear_params="true" /><param name="odom_frame" value="odom" /><param name=map_update_interval" value="2.0" /></launch>
Hector-SLAM
<param name="update_factor_free" value="0.4" /><param name="update_factor_occupied" value="0.7" /><param name="map_update_distance_thresh" value="0.2" /><param name="map_update_angle_thresh" value="0.06" />

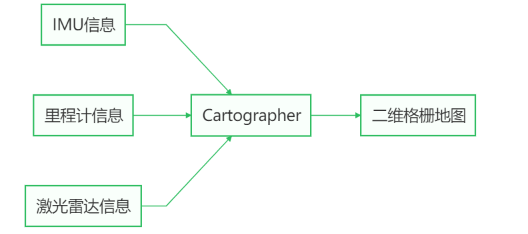
Cartergrapher
include "map_builder.lua"include "trajectory_builder.lua"options={map_builder=MAP_BUILDER,trajectory_builder=TRAJECTORY_BUILDER,map_frame="map",tracking_frame="base_footprint",published_frame="odom",provide_odom_frame=false,publish_frame_projected_to_2d=false,use_odometry=true,use_nav_sat=false,use_landmarks=false,