卫星通信天线的极化角定义、计算、与位置和姿态的关系
卫星通信天线的极化角定义、计算、与位置和姿态的关系
天线控制器根据载体的姿态信息(通过安装在载体上的惯导获得),卫星的位置(通过卫星星历计算得到),载体的位置(通过GPS定位得到),能够计算出天线的波束指向(方位角和俯仰角)。天线的伺服机构通过电机控制天线转动相应的角度,使得天线波束中心在几何上正好对准卫星。
天线波束中心对准卫星之后,还不能保证天线能够正常接收卫星信号,这里还有一个极化角匹配的问题。
什么是天线的极化角
极化角 (Polarization Angle): 指的是卫星下行信号的电场矢量方向,与地面天线本地水平面之间的夹角。
为什么会存在天线极化角?
天线极化角是由卫星和地面天线本身的几何关系造成的。
- • 同步卫星通常在赤道上空。卫星发射的信号有水平极化信号,也会有垂直极化信号。卫星天线发射的信号的极化(例如“垂直极化”)是相对于地球赤道平面来定义的。下面是常见卫星发射的信标信号的频率和极化,其中V代表垂直,H代表水平。

卫星信标信号
- • 由于地球是一个球体。地面天线在地球表面的任何一个位置,都有一个自己的“本地水平面”。
- •卫星信号的“垂直极化”方向,投影到地面天线所在位置的“本地水平”参考系上时,不可能是完全的垂直的,而是会产生一个倾斜角,这就是极化角的由来。因此,除了正好处在卫星正下方(星下点)经线上的地区,对于其他绝大多数地区的地面天线而言,天线接收的卫星信号都存在不同的极化角。
- • 极化角就是:为了让地面天线能“正对”卫星信号的极化方向,需要旋转一个角度。否则就会产生极化失配,信号接收效率大幅下降
我们可以举一个形象的例子说明天线俯仰角方位角和极化角的关系:
我们把卫星下行信号像一把锁的“锁孔”,天线馈源就像一个“钥匙”。
- • 方位角和俯仰角对准卫星,相当于将“钥匙”精确地对准“锁孔”,但是钥匙插入锁孔之后,锁还不能打开。
- • 旋转极化角相当于钥匙插进锁孔之后,再旋转一个角度,当钥匙的齿牙跟锁芯对齐的时候,锁就打开了。相反,如果齿牙和锁芯不匹配,锁就打不开。
相应的,如果天线的极化角和卫星信号的电场矢量方向不匹配,天线会产生极化失配,无法最大效率的接收信号能量。而当极化角偏差是90°时,天线几乎接收不到信号,导致通信中断。
举例说明:
假设天线在北京,要对准一颗位于赤道上空、经度偏西的同步卫星,该卫星发射的信号是垂直极化,这个垂直极化是相对于赤道平面垂直的。
- • 地面天线要想完成对星,首先需要将天线的方位角朝向西南方向,并抬起一定的俯仰角,完成了几何方向的对准卫星。
- • 如果卫星信号到达地面天线时,相对于地面天线的本地水平面,是向右下方倾斜了20°,所以必须将天线的馈源(LNB)向反方向(逆时针)旋转20°来进行补偿。
极化角是怎么计算的?
我们来讨论这个问题:
天线安装在汽车上,跟踪的是地球同步卫星。刚开始汽车静止,天线伺服机构已经调整方位角、俯仰角和极化角完成对星。然后汽车以100km/h的速度前进,在前进的过程中,通过调整方位角和俯仰角保证天线一直对准卫星,但是不调整天线极化角,随着汽车位置的变化,天线极化角的变化有多少度?
定性计算过程如下:
我们把卫星、汽车的出发点、汽车1小时之后的终点,建立一个三角形:
- • 顶点A: 地球同步轨道上的卫星。
- • 顶点B: 汽车的出发点。
- • 顶点C: 汽车一小时后的终点。
在这个三角形中,边AB和边AC的长度都是约等于36,000公里,而边BC的长度仅为100公里,从顶点A(卫星)看下来,B点和C点之间的夹角(视角变化)非常非常小。
由于极化角是由“天线-卫星”相对几何位置决定的,汽车位置移动100km导致的“天线-卫星”的相对几何关系的改变微乎其微,所以极化角变化也是非常微小的。
定量计算:
极化角计算公式
根据《卫星通信》(Satellite Communications)by Timothy Pratt, Charles W. Bostian, Jeremy E. Allnutt中提到的,天线极化角的计算公式如下:
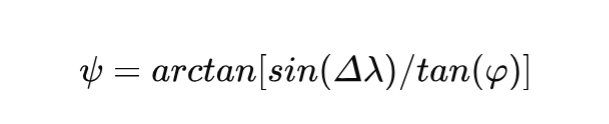
其中φ是地面天线所在地的纬度(北纬为正,南纬为负),Δλ是卫星星下点的经度与地面天线所在地的经度之差。
当卫星的经度和地面天线的经度相同时,Δλ=0,则ψ = arctan [ sin(0) / tan(φ) ] = arctan(0) = 0°。此时地面天线的极化角等于0°。
案例说明:天线移动100km,极化角变化多大?
场景设定:
- • 卫星位置: 东经101°的地球同步卫星。
- • 汽车初始位置 (A点): 北纬40°,东经85°。
- • 汽车运动: 沿东经85°经线,向正北方向行驶100公里。
计算过程:
- • 计算经度差 (Δλ):
经度差是地面天线经度与卫星经度的差值,在本次行程中,汽车的经度不变,因此 Δλ 是一个常数。 Δλ = λ_ant - λ_sat = (85°) - (101°) = -16°
- • 计算纬度变化
地球的纬度每度对应的南北距离约为111.32公里。
纬度变化量 Δφ ≈ 100 km / 111.32 km/° ≈ 0.898°
为了便于计算,我们可近似为 0.9°,因此汽车终点(B点)位置的纬度是
φ_B = φ_A + Δφ = 40° + 0.9° = 40.9°
- • 计算A点的极化角
`ψ_A = arctan[sin(-16°) / tan(40°)]`
`ψ_A = arctan[0.2756 / 0.8391]`
`ψ_A ≈ -18.18°- • 计算B点的极化角
`ψ_B = arctan[sin(-16°) / tan(40.9°)]`
`ψ_B = arctan[0.2756 / 0.8662]`
`ψ_B ≈ -17.66° - • 极化角变化
Δψ = ψ_B - ψ_A = -17.66° - (-18.18°) = 0.52°
载体位置变化100km,极化角变化了0.52°。
同理我们可以计算出,载体位置变化1000km,极化角变化4.8°。
极化角还跟载体姿态相关
我们来讨论这个问题:
载体姿态变化的情况下,由于天线伺服系统首先会根据载体姿态变化调整了天线指向,保证天线波束中心始终指向卫星,这种情况下,姿态引起的极化角变化有多少度?
天线俯仰/方位伺服系统在补偿姿态变化以保持天线对星指向的同时,无法自动修正姿态变化而产生的极化角误差,极化角偏差不会被消除。
假设载体的姿态变化是:
- •
Δr: 横滚角(Roll)变化量 - •
Δp: 俯仰角(Pitch)变化量 - •
Δy: 偏航角(Yaw)变化量
根据载体姿态,卫星位置,天线位置计算得到的天线指向角:
- •
Az: 方位角(Azimuth) - •
El: 俯仰角(Elevation)
姿态变化影响极化角 (ΔPol)的公式 可以通过下面这个经典的运动学近似公式来计算

为了简化和聚焦于主要影响,在许多动中通天线控制的应用中,当方位角 Az 不在0°或180°附近时,sin(Az) ≈ 1,cos(Az) ≈ 0,上面的公式可以进一步简化为:

由上面的公式可以得知:
- 1. 载体横滚角变化是影响极化角最直接,最重要的分量,载体横滚角的变化几乎是一对一的直接转换为极化角的变化。
- 2. 载体偏航角度的影响跟天线的俯仰角相关
- • 当
El = 0(天线水平指向地平线):sin(El) = 0,此时偏航对极化角没有影响。 - • 当
El = 90(天线垂直指向天顶):sin(El) = 1,此时ΔPol ≈ Δr + Δy。
- 3. 载体的俯仰角变化对极化角的影响相对较小。
下面是几个典型场景下,载体姿态变化对极化角的影响。
| 场景 | 载体姿态变化 | 天线俯仰角(El) | 主要影响项 | 所需极化角修正 ΔPol (约) |
| 场景1: 船舶在风浪中 | 横滚 Δr = +10° (偏航 Δy ≈ 0) | 30° | 横滚主导 | 10° + 0 * sin(30°) = 10° |
| 场景2: 飞机进入转弯 | 偏航 Δy = +20° (横滚已由天线补偿) | 45° | 偏航主导 | 0 + 20° * sin(45°) = 14.1° |
| 场景3: 汽车在立交桥上盘旋 | 偏航 Δy = +90° (90度转弯) | 60° (卫星位置较高) | 偏航效应显著 | 0 + 90° * sin(60°) = 77.9° |
⚠️ 这些变化如果不做实时补偿,将会导致严重的极化失配,甚至通信中断!
总结
| 要点 | 内容 |
| ✅ 极化角是信号接收的必备匹配条件之一 | 只靠方位角+俯仰角对准卫星还不够 |
| ✅ 极化角随地面位置变化而变化 | 经纬度差 16°,极化角可变十几度 |
| ✅ 极化角也受载体姿态影响 | 特别是横滚和偏航角度 |
| ✅ 姿态变化引起的极化角偏差不能靠伺服系统自动补偿 | 必须由控制算法修正 |
在下一章,我们将介绍极化角偏差对天线增益的影响、对交叉极化隔离度的影响。