【ROS学习笔记】ROS1和ROS2对比
前言
在具身智能行业加速向商用化迈进的背景下,早期支撑机器人技术发展的ROS1,因难以适配商用场景对可靠性、实时性等核心需求,正逐步退出历史舞台;而为突破这一技术瓶颈、推动机器人实现规模化商用,新一代机器人操作系统ROS2应运而生,为具身智能技术的产业落地提供了关键支撑。

ROS发展历程
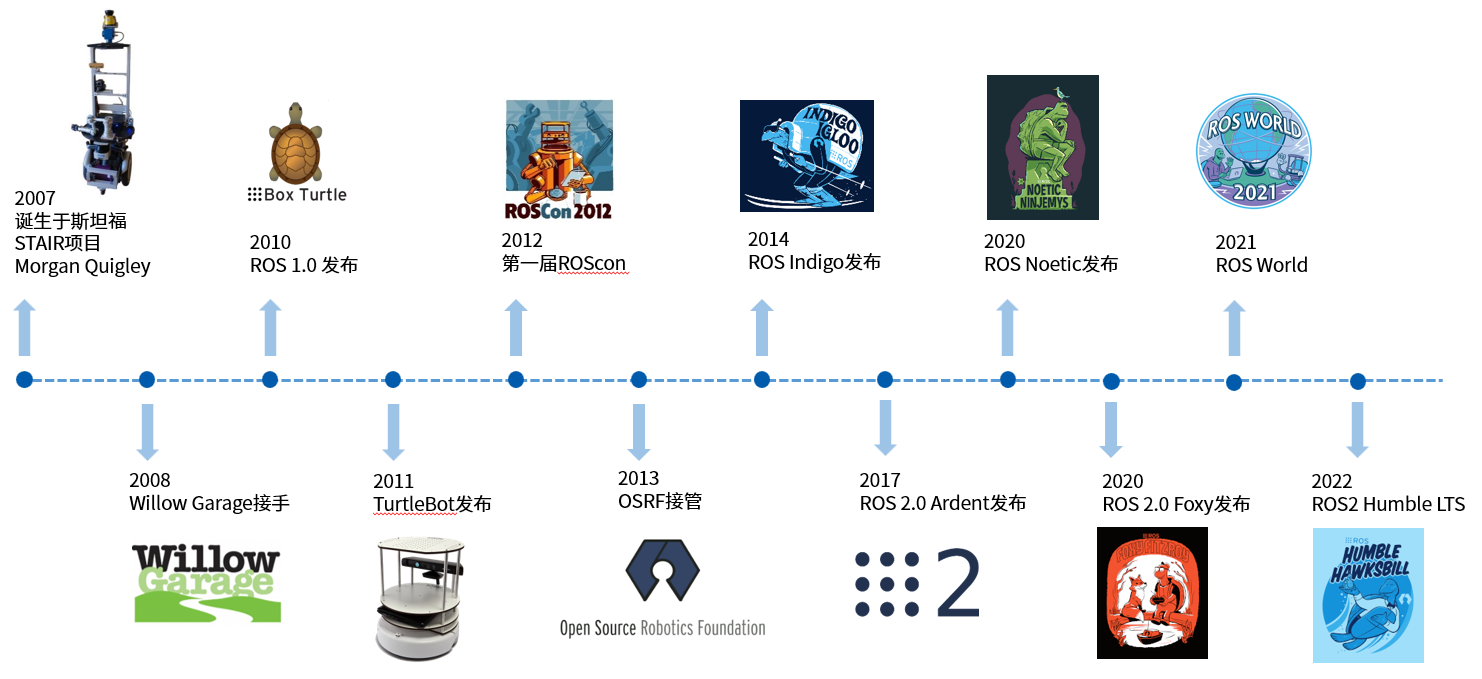
上面这张时间线图清晰呈现了ROS(机器人操作系统)从起源到持续演进的关键历程,同时梳理了ROS1与ROS2两条技术线的核心发展节点:
-
ROS1发展脉络:2007年,ROS雏形诞生于斯坦福大学的STAIR项目;2008年Willow Garage接手推动其发展;2010年,ROS 1.0(代号“Box Turtle”)正式发布;后续伴随2011年TurtleBot机器人(降低ROS入门门槛)发布、2012年首届ROSCon(ROS社区大会)举办、2013年Open Source Robotics Foundation(OSRF)接管生态运营,以及2014年ROS Indigo、2020年ROS Noetic等版本发布,再到2021年ROS World等社区活动,构成了ROS1从学术萌芽到生态繁荣的轨迹。
-
ROS2发展脉络:为适配商用化、实时性等更复杂的技术与产业需求,ROS2逐步迭代:2017年发布ROS 2.0 Ardent版本,2020年发布ROS 2.0 Foxy版本,2022年推出ROS2 Humble LTS(长期支持版本),完成了从技术探索到稳定商用底座的进化,成为具身智能时代机器人开发的核心工具之一。
如果学习ROS2,建议选择ROS2 Humble版本。
ROS1 vs ROS2:优缺点全面对比
在机器人开发领域,ROS(Robot Operating System)扮演着核心角色。ROS1自2009年发布以来,已成为行业标准;而ROS2作为其进化版,从2015年起逐步完善。两者各有千秋,本文将深入对比它们的优缺点,帮助你选择最适合的工具。
ROS1概述
ROS1是一个开源框架,专注于简化机器人软件开发。它基于发布-订阅模型,使用TCP/IP协议进行节点间通信。核心组件包括主节点(master)管理节点注册,以及ROS消息传递系统。ROS1广泛应用于学术和工业场景,如自动驾驶和机械臂控制。
ROS2概述
ROS2是ROS的下一代版本,旨在解决ROS1的局限性。它采用DDS(Data Distribution Service)作为底层通信协议,支持去中心化架构。ROS2强调实时性、安全性和多机器人协作,适用于更复杂的系统,如工业自动化和智能物流。
- 多机器人系统: 未来机器人一定不会是独立的个体,机器人和机器人之间也需要通信和协作,ROS2为多机器人系统的应用提供了标准方法和通信机制。
- 跨平台: 机器人应用场景不同,使用的控制平台也会有很大差异,比如自动驾驶汽车中的算力性能肯定比AMR机器人强很多,为了让所有机器人都可以运行ROS2,ROS2可以跨平台运行于Linux、Windows、MacOS、RTOS,甚至是没有任何系统的微控制器(MCU)上,这样我们就不用纠结自己的控制器能不能用ROS了。
- 实时性: 机器人运动控制和很多行为策略要求机器人具备实时性,比如机器人要可靠得在100ms内发现前方的行人,或者稳定的在1ms周期内完成运动学、动力学的解算,ROS2为类似这样的实时性需求提供了基本保障。
- 网络连接: 无论在怎样的网络环境下,ROS2都可以尽量保障机器人大量数据的完整性和安全性,比如在wifi信号不好的时候数据也要尽力发送过去,在有黑客入侵风险的场景下要对数据进行加密解密。
- 产品化: 现今大量机器人已经走向我们的生活,未来还会越来越多,ROS2不仅可以用于机器人研发阶段,还可以直接搭载在产品中,走向消费市场,这对ROS2的稳定性、强壮性也提除了巨大挑战。
- 项目管理: 机器人开发是一个复杂的系统工程,设计、开发、调试、测试、部署等全流程的项目管理工具和机制,也会在ROS2中体现,更方便我们去开发一款机器人。
优缺点对比
以下从关键维度分析两者的优劣。为便于理解,我们使用表格形式总结核心点,再详细展开。
| 维度 | ROS1 优点 | ROS1 缺点 | ROS2 优点 | ROS2 缺点 |
|---|---|---|---|---|
| 实时性 | 简单易用,适合软实时应用 | 延迟高,不适合硬实时需求(如Δt<10ms\Delta t < 10msΔt<10ms) | 支持硬实时,延迟低 | 配置复杂,需优化DDS参数 |
| 通信架构 | 成熟稳定,依赖主节点简化管理 | 主节点单点故障,网络中断导致系统崩溃 | 去中心化,无单点故障,支持多机器人 | 学习曲线陡峭,需掌握DDS概念 |
| 安全性 | 社区资源丰富,易于调试 | 缺乏内置加密,易受攻击 | 提供端到端加密和访问控制 | 部分安全特性需手动配置 |
| 兼容性与生态 | 包库庞大(如ROS Melodic\text{ROS Melodic}ROS Melodic含5000+包) | 对新硬件支持有限 | 跨平台更好(支持Windows、RTOS) | 包较少,兼容ROS1需桥接工具 |
| 开发效率 | 入门快,教程丰富 | 多机器人协作困难 | 模块化设计,便于扩展 | 文档不完善,社区支持较弱 |
详细解析:
- 实时性:ROS1在非实时场景表现优秀,但高负载下延迟波动大。例如,在运动控制中,延迟可能超过 50ms50ms50ms,导致精度下降。ROS2通过DDS实现确定性通信,延迟可控制在1−5ms1-5ms1−5ms内,适合工业机器人。但需注意:ROS2的实时性能依赖于DDS实现(如Fast DDS),配置不当会降低效率。
- 通信架构:ROS1的主节点简化了节点发现,但网络分区时系统失效。ROS2采用分布式发现机制,节点可独立运行,提升鲁棒性。例如,在多无人机编队中,ROS2无需中央协调器。然而,DDS的复杂性增加了开发门槛,新手可能需额外学习。
- 安全性:ROS1默认无加密,数据易被窃听(如消息泄露风险\text{消息泄露风险}消息泄露风险)。ROS2集成安全层,支持TLS/DTLS加密,满足ISO 21434标准。但启用安全特性会增加资源开销,需权衡性能。
- 兼容性与生态:ROS1拥有庞大社区,包如MoveIt和Gazebo可直接使用。ROS2生态正在成长,但许多包需移植;与ROS1兼容时,需使用
ros1_bridge工具,可能引入延迟。 - 开发效率:ROS1的成熟工具链(如RViz)加速原型开发。ROS2的改进API(如rclpy)更模块化,但文档较少,初学者可能耗时更多。
其他考量
- 学习曲线:ROS1更易上手,适合教学和小项目;ROS2适合进阶开发者,需投入时间掌握DDS。
- 适用场景:
- 选择ROS1:快速原型、教育、低实时需求项目(如服务机器人)。
- 选择ROS2:工业自动化、多机器人系统、高安全应用(如医疗机器人)。
- 未来趋势:ROS2是官方重点发展方向,长期看将逐步取代ROS1。但过渡期需谨慎评估迁移成本。
结论
ROS1和ROS2并非简单替代关系,而是互补工具。ROS1以其成熟生态和低门槛,仍是入门首选;ROS2则在实时性、安全性和扩展性上优势明显,代表未来方向。建议:新项目优先考虑ROS2,旧系统可逐步迁移。最终选择应基于项目需求——追求稳定选ROS1,拥抱创新选ROS2。机器人领域日新月异,持续学习才能驾驭变革!