区域提议(Region Proposal)
区域提议(Region Proposal)是计算机视觉中用于目标检测任务的关键步骤,旨在识别图像中可能包含物体的候选区域。该技术通过算法生成一系列可能包含物体的边界框,从而减少后续物体识别和分类的计算量。
区域提议的重要性与作用
在目标检测流程中,区域提议算法充当着至关重要的角色 。其主要目标是从图像中高效地提取出可能包含感兴趣物体的区域,从而避免对整个图像进行密集搜索 。这不仅提高了检测效率,还有助于提升检测的准确性 。具体来说,区域提议算法具有以下几个方面的作用:
- 减少计算量:通过生成有限数量的候选区域,减少了后续分类器需要处理的区域数量,显著降低了计算复杂度 。
- 提高检测效率:由于只需在候选区域内进行精细的物体识别,因此可以更快地完成目标检测任务 。
- 提升检测精度:高质量的区域提议算法能够提供更准确的物体位置信息,从而有助于提高最终的检测精度 .
区域提议的方法
区域提议算法可以分为传统方法和基于深度学习的方法两大类 1。
1. 传统区域提议方法
传统方法主要依赖于手工设计的特征和图像分割技术 。以下是几种常见的传统区域提议方法:
- 选择性搜索(Selective Search):通过图像分割生成初始区域,然后基于颜色、纹理、大小等特征进行区域合并,从而得到候选区域 . 如图 展示了选择性搜索在对象检测中的应用。
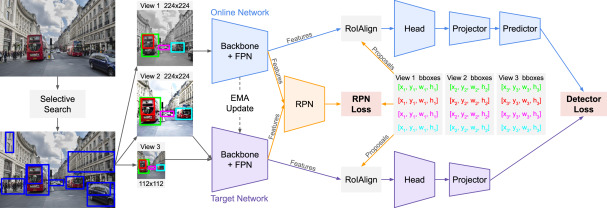
计算机视觉对象检测系统
- Edge Boxes:利用图像的边缘信息来生成候选区域,认为物体边界通常对应于图像中的边缘 。
- 基于纹理相似度和感知分组的算法:这类算法通过图像分割,并根据纹理描述符和相似性度量进行区域合并,以生成高质量的候选区域 。
2. 基于深度学习的区域提议方法
基于深度学习的方法利用卷积神经网络(CNN)自动学习图像特征,从而生成更准确的候选区域 。最具代表性的是区域提议网络(Region Proposal Network,RPN),它与Faster R-CNN等目标检测框架结合使用,实现了端到端的训练和检测 。
- 区域提议网络(RPN):RPN通过在卷积特征图上滑动小网络,同时预测物体边界框和objectness得分,从而生成候选区域 。RPN能够有效地预测具有各种尺度和宽高比的区域提议 。
- 多策略区域提议网络:为了进一步提高区域提议的质量,研究者们提出了多策略RPN,通过结合不同的策略来生成更理想的候选区域 。
改进的区域提议网络
为了适应不同的应用场景和需求,研究者们对RPN进行了各种改进,例如:
- 注意力引导的RPN:通过引入注意力机制,使网络能够更好地关注图像中的重要区域,从而提高区域提议的质量 。
- 深度强化学习的RPN:利用深度强化学习来优化RPN的训练过程,使其能够更好地适应目标检测任务 。
- Scale Adaptive Proposal Network (SAPNet): 考虑到遥感图像中物体的大小和分布特性,SAPNet通过自适应地调整提议区域的尺度,从而提高检测精度 。
- 基于雷达的区域提议网络 (RRPN): 在自动驾驶车辆中,RRPN利用雷达数据生成实时的区域提议,为目标检测提供支持 。
- Transformer Region Proposal:有研究者提出使用Transformer结构替代传统的卷积神经网络,通过自注意力机制获取图像的位置信息和类别,从而实现目标检测 。
- Selected Anchor RPN (AS-RPN):通过选择有效的锚框(anchor)而不是密集锚框,来提取文本提议,从而减少计算浪费 。
下图 展示了两阶段目标检测框架,其中区域提议网络(RPN)在第一阶段生成候选区域,然后在第二阶段对这些区域进行分类和微调。
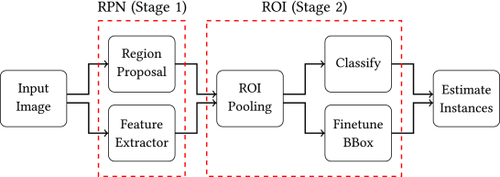
两阶段目标检测框架
区域提议的应用
区域提议技术已被广泛应用于各种目标检测任务中,例如:
- 复杂对象检测:在复杂场景中,区域提议机制可以有效地定位潜在的复杂对象。
- 行人检测:通过改进的残差注意力网络,RPN可以生成更准确的行人候选区域。
- 医学图像分析:在医学图像中,RPN可以用于实时器官检测。
- 遥感图像分析:SAPNet等方法可以提高遥感图像中多目标检测的准确性。
- 自动驾驶:RRPN等方法可以为自动驾驶车辆提供实时的目标检测。
- 驾驶员行为识别:通过检测驾驶员的动作相关对象,可以识别驾驶员的分心行为 。
- Few-shot目标检测:通过预训练RPN,可以提高小样本目标检测的性能 。
展望
区域提议作为目标检测中的关键步骤,经历了从传统方法到基于深度学习方法的演变 。随着深度学习技术的不断发展,RPN及其各种改进方法在提高目标检测的效率和精度方面发挥着越来越重要的作用 。未来,区域提议技术将继续朝着更高效、更精确、更适应各种应用场景的方向发展。