【双光相机配准】红外-可见光双光相机的坐标转换原理与实现
目录
- 前置步骤
- 深度估计原理与公式
- 单应性矩阵(Homography)原理
- Homography 的数学背景
- 单应性与相机投影关系
- 实现步骤
- 实现代码
- 深度估计+Homography坐标转换代码
前置步骤
-
需要计算出可见光相机的内参,参考:
【双光相机配准】可见光相机内参标定流程
获取到内参文件
vis_camera_calibration_{timestamp}.json -
需要计算出红外-可见光双光相机在不同距离下的Homography单应性矩阵,参考:
【双光相机配准】可见光与红外相机计算Homography
获取到双光相机在多个距离下的Homography单应性矩阵文件:homography.yaml
深度估计原理与公式
背景原理:针孔相机模型
计算深度/距离的基础就是 针孔相机模型(Pinhole Camera Model)。
它的基本投影关系是:

其中:
X,Y,Z:物体在真实世界坐标系中的三维坐标(Z 是深度/距离)。
𝑥,𝑦:物体在相机成像平面上的二维坐标(像素坐标)。
𝑓:相机焦距(以像素为单位,pixel)。
应用到物体宽度/高度:
物体真实宽度(单位 mm):Wreal
物体在图像中的像素宽度:Wpixel
焦距(像素单位,px):f

方法1:使用宽度/高度计算
def estimate_distance_from_bbox(self, bbox_vis, real_width_mm, real_height_mm, use_width=True):"""使用像素尺寸和真实尺寸估计距离单位统一为毫米返回距离 cm"""x1, y1, x2, y2 = bbox_vispixel_size = (x2 - x1) if use_width else (y2 - y1)real_size_mm = real_width_mm if use_width else real_height_mm# 深度公式:distance_mm = (real_size_mm * focal_length_px_per_mm) / pixel_size_pxdistance_mm = (real_size_mm * self.focal_length_px_per_mm) / pixel_sizedistance_cm = distance_mm / 10.0 # 转 cmreturn distance_cm
方法2:独立计算,再取平均

def estimate_distance_avg(self, bbox_vis, real_width_mm, real_height_mm):"""方法2: 宽度和高度分别计算距离, 然后取平均单位统一为毫米返回距离 cm"""x1, y1, x2, y2 = bbox_vispixel_w = x2 - x1pixel_h = y2 - y1# 宽度方向估计dist_w = (real_width_mm * self.focal_length_px_per_mm) / pixel_w# 高度方向估计dist_h = (real_height_mm * self.focal_length_px_per_mm) / pixel_h# 平均distance_mm = 0.5 * (dist_w + dist_h)return distance_mm / 10.0 # 转 cm
方法3:面积法(更常见)
基于物体的 投影面积:
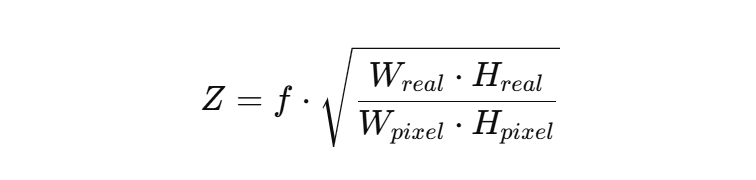
def estimate_distance_area(self, bbox_vis, real_width_mm, real_height_mm):"""方法3: 基于面积比计算距离单位统一为毫米返回距离 cm"""x1, y1, x2, y2 = bbox_vispixel_w = x2 - x1pixel_h = y2 - y1# 投影面积pixel_area = pixel_w * pixel_hreal_area_mm2 = real_width_mm * real_height_mm# 深度公式:Z = f * sqrt(real_area / pixel_area)distance_mm = self.focal_length_px_per_mm * (real_area_mm2 / pixel_area) ** 0.5return distance_mm / 10.0 # 转 cm
单应性矩阵(Homography)原理
Homography 的数学背景
在平面几何或透视投影下,两个图像之间的点对应关系可以用 单应性矩阵 H 表示:

(𝑥,𝑦):源图像的点坐标(齐次坐标表示为 [𝑥,𝑦,1]𝑇
(𝑥′,𝑦′):目标图像的点坐标
𝐻:3×3 的单应性矩阵,只有 8 个自由度(因为整体尺度不唯一)
单应性与相机投影关系
如果场景点位于某个平面(比如标定板所在平面),那么该平面在两个相机图像之间的关系可用 Homography 表示。
对于相机内参矩阵 𝐾,外参 [𝑅∣𝑡],有:
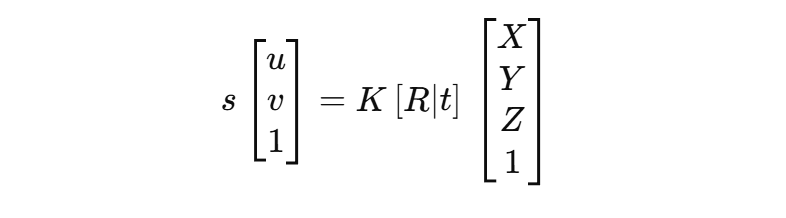
当场景点约束在 Z = Z₀ 平面 时,可以消去一维,从而得到 平面到平面的关系,推导为:

其中:
𝐾1,𝐾2:两个相机的内参
𝑅,𝑡:相机间的相对姿态
𝑛,𝑑:平面法向量与距离
实现步骤
- 取可见光框的角点 corners
corners = [(x1,y1),(x2,y1),(x2,y2),(x1,y2)]
- 先用一个点估计距离(map_point_with_depth → 得到 distance_cm)
- 获取深度对应的homography
- 把点从 vis 分辨率 → calib 分辨率

- 应用 Homography:

- 把点从 calib 分辨率 → 目标 IR 分辨率

7.收集四个角点,取 min/max → IR 框
实现代码
def map_bbox_with_depth(self, bbox_vis, real_width_mm, real_height_mm, vis_res=(1280,720), ir_res=(640,480), calib_vis_res=(1280,720), calib_ir_res=(1280,960)):"""将可见光 bbox 映射到 IR bbox,返回 IR bbox 和距离(cm)"""x1, y1, x2, y2 = bbox_viscorners = [(x1,y1),(x2,y1),(x2,y2),(x1,y2)]first_point, distance_cm = self.map_point_with_depth(corners[0], real_width_mm, real_height_mm, bbox_vis,vis_res, ir_res, calib_vis_res, calib_ir_res)H = self.get_interpolated_homography(distance_cm)mapped_corners = []for pt in corners:scale_vis_x, scale_vis_y = calib_vis_res[0]/vis_res[0], calib_vis_res[1]/vis_res[1]p = np.array([pt[0]*scale_vis_x, pt[1]*scale_vis_y, 1.0], dtype=np.float64)p2 = H.dot(p)p2 /= p2[2]x_ir = p2[0] * ir_res[0]/calib_ir_res[0]y_ir = p2[1] * ir_res[1]/calib_ir_res[1]mapped_corners.append((x_ir, y_ir))xs = [p[0] for p in mapped_corners]ys = [p[1] for p in mapped_corners]return (min(xs), min(ys), max(xs), max(ys)), distance_cm
深度估计+Homography坐标转换代码
需要输入参数:
5. VIS_CALIB_JSON表示相机内参文件(vis_camera_calibration_{timestamp}.json)路径,获取详见上一章;
6. HOMOGRAPHY_YAML表示多个距离下的Homography单应性矩阵文件(homography.yaml)路径,获取详见上一章;
7. real_width_mm和real_height_mm表示带转换坐标的目标真实的宽高尺寸,用于深度估计,单位mm。
8. bbox_vis表示待转换的目标在可见光图像的bbox坐标,例如(585, 412, 600, 427)
完整代码:
import numpy as np
import cv2
import os
import jsonclass DepthAwareHomography:def __init__(self, homography_yaml_path, camera_intrinsics_path=None, camera_type="ir"):"""深度感知 Homography 映射器(单位统一为毫米)"""self.homography_dict = self.load_homography_matrices(homography_yaml_path)self.distances = sorted([int(k[1:]) for k in self.homography_dict.keys()]) # cmself.camera_type = camera_type# 加载相机内参if camera_intrinsics_path and os.path.exists(camera_intrinsics_path):self.camera_matrix, self.focal_length_px_per_mm = self.load_camera_intrinsics_from_json(camera_intrinsics_path)print(f"✅ 已从 {camera_intrinsics_path} 加载 {self.camera_type.upper()} 相机内参")else:self.focal_length_px_per_mm = 1000 # 默认焦距 px/mmself.camera_matrix = Noneprint("⚠️ 使用默认焦距值,建议提供相机内参JSON文件")# 主点默认值self.principal_point = (640, 480)print(f"加载的标定距离范围: {min(self.distances)}cm ~ {max(self.distances)}cm")def load_homography_matrices(self, yaml_path):"""加载不同距离的 Homography 矩阵"""fs = cv2.FileStorage(yaml_path, cv2.FILE_STORAGE_READ)homography_dict = {}for d in range(90, 170, 10):key = f'D{d}'node = fs.getNode(key)if not node.empty():H_node = node.getNode("H")if not H_node.empty():homography_dict[key] = H_node.mat()fs.release()return homography_dictdef load_camera_intrinsics_from_json(self, json_path):"""加载相机内参"""with open(json_path, 'r') as f:calib_data = json.load(f)camera_matrix = np.array(calib_data["camera_matrix"])if "focal_length_px_per_mm" in calib_data:focal_length_px_per_mm = calib_data["focal_length_px_per_mm"]else:fx, fy = camera_matrix[0,0], camera_matrix[1,1]focal_length_px_per_mm = (fx + fy) / 2print(f"📊 标定焦距: {focal_length_px_per_mm:.2f} px/mm")return camera_matrix, focal_length_px_per_mmdef estimate_distance_from_bbox(self, bbox_vis, real_width_mm, real_height_mm, use_width=True):"""使用像素尺寸和真实尺寸估计距离单位统一为毫米返回距离 cm"""x1, y1, x2, y2 = bbox_vispixel_size = (x2 - x1) if use_width else (y2 - y1)real_size_mm = real_width_mm if use_width else real_height_mm# 深度公式:distance_mm = (real_size_mm * focal_length_px_per_mm) / pixel_size_pxdistance_mm = (real_size_mm * self.focal_length_px_per_mm) / pixel_sizedistance_cm = distance_mm / 10.0 # 转 cmreturn distance_cmdef get_interpolated_homography(self, distance_cm):"""根据距离插值得到 Homography 矩阵"""distance_cm = max(min(distance_cm, self.distances[-1]), self.distances[0])distances = np.array(self.distances)idx = np.abs(distances - distance_cm).argmin()nearest_dist = distances[idx]if abs(distance_cm - nearest_dist) < 0.5:return self.homography_dict[f'D{int(nearest_dist)}']if distance_cm < nearest_dist:dist1, dist2 = nearest_dist - 10, nearest_distelse:dist1, dist2 = nearest_dist, nearest_dist + 10dist1, dist2 = max(dist1, self.distances[0]), min(dist2, self.distances[-1])if dist1 == dist2:return self.homography_dict[f'D{int(dist1)}']H1, H2 = self.homography_dict[f'D{int(dist1)}'], self.homography_dict[f'D{int(dist2)}']H1, H2 = H1 / H1[2,2], H2 / H2[2,2]alpha = (distance_cm - dist1) / (dist2 - dist1)H_interp = (1-alpha)*H1 + alpha*H2H_interp = H_interp / H_interp[2,2]return H_interpdef map_point_with_depth(self, pt_vis, real_width_mm, real_height_mm, bbox_vis, vis_res=(1280,720), ir_res=(640,480), calib_vis_res=(1280,720), calib_ir_res=(1280,960)):"""将可见光单点映射到 IR 坐标,返回 IR 坐标和估计距离(cm)"""distance_cm = self.estimate_distance_from_bbox(bbox_vis, real_width_mm, real_height_mm)H = self.get_interpolated_homography(distance_cm)scale_vis_x, scale_vis_y = calib_vis_res[0]/vis_res[0], calib_vis_res[1]/vis_res[1]p = np.array([pt_vis[0]*scale_vis_x, pt_vis[1]*scale_vis_y, 1.0], dtype=np.float64)p2 = H.dot(p)p2 /= p2[2]x_ir = p2[0] * ir_res[0]/calib_ir_res[0]y_ir = p2[1] * ir_res[1]/calib_ir_res[1]return (float(x_ir), float(y_ir)), distance_cmdef map_bbox_with_depth(self, bbox_vis, real_width_mm, real_height_mm, vis_res=(1280,720), ir_res=(640,480), calib_vis_res=(1280,720), calib_ir_res=(1280,960)):"""将可见光 bbox 映射到 IR bbox,返回 IR bbox 和距离(cm)"""x1, y1, x2, y2 = bbox_viscorners = [(x1,y1),(x2,y1),(x2,y2),(x1,y2)]first_point, distance_cm = self.map_point_with_depth(corners[0], real_width_mm, real_height_mm, bbox_vis,vis_res, ir_res, calib_vis_res, calib_ir_res)H = self.get_interpolated_homography(distance_cm)mapped_corners = []for pt in corners:scale_vis_x, scale_vis_y = calib_vis_res[0]/vis_res[0], calib_vis_res[1]/vis_res[1]p = np.array([pt[0]*scale_vis_x, pt[1]*scale_vis_y, 1.0], dtype=np.float64)p2 = H.dot(p)p2 /= p2[2]x_ir = p2[0] * ir_res[0]/calib_ir_res[0]y_ir = p2[1] * ir_res[1]/calib_ir_res[1]mapped_corners.append((x_ir, y_ir))xs = [p[0] for p in mapped_corners]ys = [p[1] for p in mapped_corners]return (min(xs), min(ys), max(xs), max(ys)), distance_cmdef show_vis2ir_result_with_depth(self, bbox, ir_path, distance_cm, actual_distance_cm=None):"""可视化 IR 图像和映射结果"""ir_image = cv2.imread(ir_path)if ir_image is None:print(f"❌ 无法读取图像: {ir_path}")returnir_image = cv2.resize(ir_image, (640,480))cv2.rectangle(ir_image, (int(bbox[0]), int(bbox[1])), (int(bbox[2]), int(bbox[3])), (255,255,255), 3)cv2.putText(ir_image, f"Est: {distance_cm:.1f}cm", (10,30), cv2.FONT_HERSHEY_SIMPLEX, 0.7, (255,255,255), 2)if actual_distance_cm:cv2.putText(ir_image, f"Actual: {actual_distance_cm}cm", (10,60), cv2.FONT_HERSHEY_SIMPLEX, 0.7, (255,255,255), 2)cv2.putText(ir_image, f"Error: {abs(distance_cm - actual_distance_cm):.1f}cm", (10,90), cv2.FONT_HERSHEY_SIMPLEX, 0.7, (255,255,255), 2)output_dir = 'output'os.makedirs(output_dir, exist_ok=True)output_path = os.path.join(output_dir, f"depth_{os.path.basename(ir_path)}")cv2.imwrite(output_path, ir_image)print(f"✅ 保存图像到: {output_path}")# =================== 测试示例 ===================
if __name__ == "__main__":HOMOGRAPHY_YAML = "homography.yaml"VIS_CALIB_JSON = "vis_camera_calibration_20250923_160641.json"mapper = DepthAwareHomography(HOMOGRAPHY_YAML, camera_intrinsics_path=VIS_CALIB_JSON, camera_type="ir")# bbox_vis = (664, 242, 694, 271) # 80cm 可见光 bbox# bbox_vis = (909, 257, 937, 283) # 90 cm 可见光 bbox# bbox_vis = (707, 446, 729, 468) # 100cm 可见光 bbox# bbox_vis = (839, 265, 858, 289) # 110cm 可见光 bbox# bbox_vis = (621, 269, 640, 289) # 120cm 可见光 bbox# bbox_vis = (748, 291, 766, 309) # 130cm 可见光 bboxbbox_vis = (585, 412, 600, 427) # 140cm 可见光 bbox# bbox_vis = (709, 410, 723, 425) # 150 cm 可见光 bboxreal_width_mm = 20.0 # mmreal_height_mm = 20.0 # mmbbox_ir, estimated_distance_cm = mapper.map_bbox_with_depth(bbox_vis, real_width_mm, real_height_mm,vis_res=(1280,720), ir_res=(640,480))print(f"估计距离: {estimated_distance_cm:.1f}cm, Vis bbox: {bbox_vis}, IR bbox: {bbox_ir}")# ir_path = '250922/80/ir/80_1.png'# ir_path = '250922/90/ir/90_4.png'# ir_path = '250922/100/ir/100_3.png'# ir_path = '250922/110/ir/110_3.png'# ir_path = '250922/120/ir/120_2.png'# ir_path = '250922/130/ir/130_2.png'ir_path = '250922/140/ir/140_2.png'# ir_path = '250922/150/ir/150_2.png'mapper.show_vis2ir_result_with_depth(bbox_ir, ir_path, estimated_distance_cm, actual_distance_cm=140)