AVM 全景式监控影像系统:原理、应用与未来
对于不少司机而言,狭窄车位的侧方停车、拥堵路段的转弯会车、低矮障碍物的避让,都是日常驾驶中的 “老大难” 问题。传统后视镜存在视野盲区,仅凭肉眼判断往往容易引发刮擦事故。而AVM(Around View Monitor,全景式监控影像系统) 的出现,彻底改变了这一现状 —— 它通过多摄像头协同工作,为驾驶员呈现车辆 360 度无死角的全景视图,就像给车辆装上了 “上帝之眼”,让复杂路况下的操作变得轻松从容。

本文将从技术原理入手,带大家全面拆解 AVM 系统的工作机制,同时探讨其在实际场景中的应用价值与未来发展方向,帮助你真正搞懂这项 “停车神器” 背后的科技逻辑。
一、AVM 系统:解决驾驶盲区的 “全景方案”
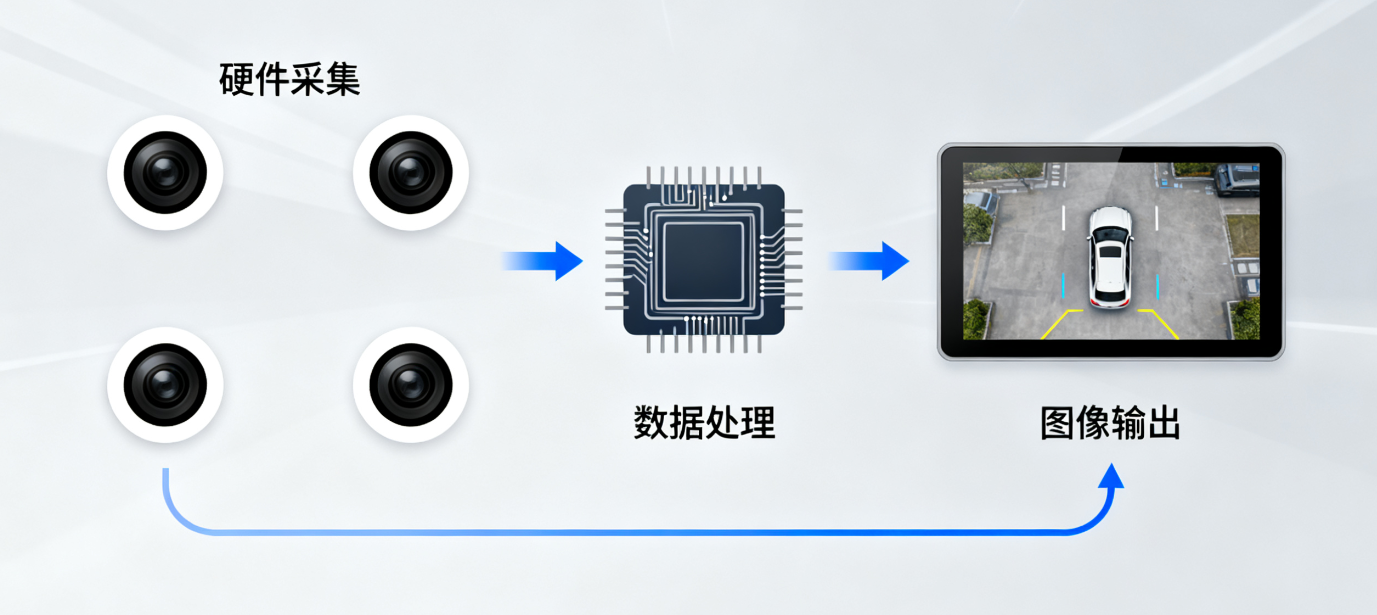
在了解原理前,我们首先要明确:AVM 系统并非单一设备,而是由硬件采集、数据处理、图像输出三大模块组成的协同系统。其核心目标是通过 “多视角拼接 + 实时计算”,消除车辆周围的视觉盲区,为驾驶员提供直观的环境参考。
传统驾驶中,车辆存在四大典型盲区:前保险杠下方(近距离低矮物体看不见)、后保险杠下方(倒车时台阶 / 石墩易被忽略)、左右车门下方(侧方停车时轮胎与路沿距离难判断)、车辆侧后方(转弯时非机动车 / 行人易被遮挡)。而 AVM 系统通过覆盖车辆四周的摄像头,能将这些盲区全部纳入视野,甚至能模拟 “俯视视角”,让驾驶员清晰看到车辆与周围物体的相对位置,极大降低操作难度。
举个实际场景:当你在商场地下车库进行侧方停车时,传统后视镜只能看到车身侧面与邻车的大致距离,却无法判断轮胎是否会蹭到路沿。此时 AVM 系统会在中控屏上显示车辆的 “俯视图”,路沿、邻车、车位线一目了然,即使是新手也能轻松完成停车。
二、深度拆解:AVM 系统的核心工作原理
AVM 系统之所以能实现 “360 度全景视野”,关键在于其背后的 “四步协同机制”—— 从图像采集到最终显示,每一步都涉及精密的硬件配合与算法处理。下面我们逐一拆解这一过程。

1. 第一步:硬件采集 —— 多摄像头 “分工协作”
AVM 系统的硬件核心是4 个高清广角摄像头,它们分别安装在车辆的四个关键位置,各司其职采集周围图像:
- 前视摄像头:通常安装在车头格栅或前挡风玻璃下方,负责采集车辆正前方 120°-150° 范围内的图像,覆盖车头盲区(如低矮障碍物、行人脚部);
- 后视摄像头:安装在车尾牌照框附近或后备箱开关处,采集车辆正后方 120°-150° 范围内的图像,主要用于倒车时观察车尾障碍物(如台阶、儿童);
- 左视摄像头:安装在左后视镜下方,采集车辆左侧车身及左后方 60°-90° 范围内的图像,覆盖左车门下方盲区(如路沿、左侧来车);
- 右视摄像头:安装在右后视镜下方,功能与左视摄像头对称,覆盖右车门下方盲区。
这些摄像头并非普通家用摄像头,而是经过特殊设计的 “鱼眼镜头摄像头”—— 其镜头焦距极短(通常在 2.8mm 以下),视角可达到 180° 以上,能最大限度覆盖车辆周围区域。同时,摄像头的分辨率通常不低于 1280×720(720P),帧率不低于 30fps,确保采集的图像清晰、流畅,为后续处理提供高质量原始数据。
此外,部分高端车型还会在摄像头中加入 “防水防尘涂层” 和 “低温启动保护”,确保在雨天、雪天、沙尘天气或低温环境下,摄像头仍能正常工作,避免因硬件故障导致 AVM 系统失效。
2. 第二步:同步校正 —— 消除 “时间差” 与 “视角差”
4 个摄像头分别采集图像后,会面临两个关键问题:时间不同步(摄像头启动速度有差异,图像采集存在毫秒级延迟)和视角不同步(摄像头安装位置不同,图像视角存在偏差)。如果直接拼接这些 “不同步” 的图像,会导致全景图出现 “重影” 或 “错位”,影响使用体验。
因此,AVM 系统会通过 “同步校正算法” 解决这两个问题:
- 时间同步:系统会给 4 个摄像头分配统一的 “时间基准信号”,确保所有摄像头在同一毫秒内采集图像,避免因延迟导致的图像错位(例如:前视摄像头已采集到 “前方有行人”,后视摄像头却延迟 0.5 秒才采集,拼接后会出现 “行人位置偏移”);
- 视角校正:由于摄像头安装位置不同(车头、车尾、后视镜高度不同),采集的图像存在 “视角倾斜”(如左视摄像头采集的图像是 “从高到低俯视”,前视摄像头是 “平视”)。系统会通过 “标定算法”,根据摄像头的安装角度、高度等参数,将所有图像调整到 “同一虚拟视角”(通常是 “从车辆正上方 2-3 米处俯视”),为后续拼接打下基础。
这里的 “标定算法” 是关键 —— 在车辆出厂前,工程师会通过 “棋盘格标定法” 对每个摄像头进行校准:将标准棋盘格图案放在车辆周围的固定位置,让摄像头采集图像,系统通过识别棋盘格的坐标,计算出摄像头的 “内参”(如焦距、畸变系数)和 “外参”(如安装位置、倾斜角度),并将这些参数存储在系统的 “标定数据库” 中。后续使用时,系统会调用这些参数,自动对采集的图像进行视角校正,确保所有图像的 “视角一致性”。
3. 第三步:图像拼接 —— 从 “四幅图” 到 “一幅全景图”
视角校正完成后,系统会进入最核心的 “图像拼接” 环节 —— 将 4 个摄像头采集的 “校正后图像” 融合成一幅完整的 “360 度全景图”。这一步的难点在于 “无缝拼接”,即让不同摄像头采集的图像在重叠区域自然过渡,看不出拼接痕迹。
图像拼接主要依赖 “特征匹配算法” 和 “融合算法”,具体分为三个步骤:
- 特征提取与匹配:系统会从 4 个摄像头的图像中,提取 “特征点”(如路边线、车位线、障碍物边缘等明显的线条或轮廓),然后通过算法对比不同图像中的特征点,找到重叠区域(例如:左视摄像头图像中的 “左前轮”,与前视摄像头图像中的 “左前轮” 是同一特征点,可作为拼接基准);
- 图像融合:在找到重叠区域后,系统会使用 “加权融合算法” 处理重叠部分 —— 将左视图像在重叠区域的像素 “逐渐淡化”,同时将前视图像在重叠区域的像素 “逐渐加深”,使两种图像的颜色、亮度自然过渡,避免出现 “拼接缝”(例如:左视图像重叠区的亮度为 100,前视图像为 120,融合后重叠区的亮度会从 100 平滑过渡到 120,肉眼无法察觉差异);
- 全景合成:融合完成后,系统会将 4 个图像的非重叠区域与融合后的重叠区域组合,生成一幅完整的 “车辆俯视图”—— 图像中心是车辆的虚拟模型(通常是简化的车身轮廓,方便驾驶员判断自身位置),周围是车辆 360 度的真实环境,驾驶员可以在中控屏上清晰看到车辆与周围物体的距离(部分系统还会用 “距离线” 标注车辆与障碍物的距离,如 “50cm”“30cm”)。
值得注意的是,部分高端 AVM 系统还会加入 “动态拼接优化”—— 当车辆行驶时(如转弯、倒车),系统会实时调整拼接参数,确保全景图始终与车辆的运动状态同步(例如:车辆向左转弯时,左视摄像头的图像占比会适当增加,让驾驶员更清晰看到左侧路况)。
4. 第四步:显示输出 —— 适配场景的 “个性化视图”
全景图合成完成后,系统会根据 “驾驶场景”,将图像输出到中控屏或仪表盘上,为驾驶员提供个性化的视图选择。常见的输出模式包括:
- 全景模式:显示完整的 360 度俯视图,适合侧方停车、倒车入库等需要全面观察周围环境的场景;
- 单视角模式:单独显示某一个摄像头的图像(如后视摄像头图像),适合倒车时重点观察车尾情况;
- 双视角模式:同时显示全景图和某一个单视角图像(如全景图 + 前视图像),适合复杂路况下 “全局 + 局部” 双重观察;
- 动态引导线模式:在全景图中加入 “倒车引导线” 或 “转弯引导线”—— 引导线会根据方向盘的转动角度实时调整,模拟车辆的行驶轨迹,帮助驾驶员判断车辆是否会蹭到障碍物(例如:方向盘向左打满时,引导线会向左弯曲,显示车辆的左转路径)。
此外,部分车型还支持 “触控缩放” 功能 —— 驾驶员可以在中控屏上点击全景图的某一区域(如右后方),系统会自动放大该区域的图像,让驾驶员更清晰地观察细节(如右后方是否有行人)。
三、AVM 系统的实际应用:不止于 “停车”
很多人认为 AVM 系统只是 “停车辅助工具”,但实际上,其应用场景远不止于此。结合不同的驾驶场景,AVM 系统能发挥多方面的价值:

1. 日常停车:告别 “刮擦焦虑”
这是 AVM 系统最基础也最常用的场景。无论是侧方停车、倒车入库,还是狭窄车位的 “挤位停车”,AVM 系统都能让驾驶员清晰看到车辆与车位线、邻车、路沿的距离。例如:侧方停车时,驾驶员可以通过全景图判断左前轮与路沿的距离(避免轮胎蹭路沿),同时观察右后方是否有来车;倒车入库时,能清晰看到车尾与后方障碍物的距离(避免撞墙或撞柱子)。
根据某汽车厂商的测试数据,配备 AVM 系统的车型,新手司机的停车刮擦事故率降低了 60% 以上,停车时间平均缩短了 40%,极大提升了停车效率与安全性。
2. 复杂路况:消除 “盲区风险”
在城市拥堵路段、小区狭窄道路或乡村土路等复杂场景中,AVM 系统能有效消除盲区风险:
- 拥堵会车:在双向仅容一车通过的狭窄道路上,驾驶员可以通过全景图观察车辆两侧与路边障碍物(如树木、墙壁)的距离,避免车身刮擦;
- 低速挪车:在小区内挪车时,能清晰看到车辆周围的儿童、宠物或低矮障碍物(如花盆、石墩),避免意外发生;
- 越野场景:在越野行驶时,AVM 系统可以帮助驾驶员观察车轮下方的路况(如坑洼、石块),避免轮胎陷入坑中或被石块刮伤。
3. 安全辅助:与其他系统 “协同工作”
随着汽车智能化的发展,AVM 系统已不再是 “独立工具”,而是与其他安全系统协同工作,提升整车安全性:
- 与倒车雷达协同:当倒车雷达检测到车辆与障碍物的距离过近(如小于 30cm)时,AVM 系统会自动放大车尾区域的图像,并发出警报,提醒驾驶员及时停车;
- 与自动泊车系统协同:在自动泊车过程中,AVM 系统会实时采集周围图像,为自动泊车算法提供环境数据,确保车辆精准停入车位;
- 与车道保持系统协同:在低速行驶时,AVM 系统可以辅助车道保持系统识别车道线,避免车辆偏离车道。
四、AVM 系统的技术趋势:从 “全景” 到 “智能”
随着硬件技术的升级和算法的优化,AVM 系统正朝着 “更高清、更智能、更融合” 的方向发展,未来将呈现三大趋势:
1. 硬件升级:从 “4 摄像头” 到 “多摄像头 + 高分辨率”
目前主流的 AVM 系统采用 4 个摄像头,但未来可能会增加摄像头数量(如 6 个或 8 个),进一步扩大视野覆盖范围(如覆盖车辆上方的天桥、隧道顶部)。同时,摄像头的分辨率将从 720P 升级到 1080P 甚至 4K,帧率提升到 60fps,让采集的图像更清晰、流畅,细节更丰富(如能清晰看到地面的小石子、标线的磨损情况)。
此外,部分厂商已开始尝试使用 “激光雷达 + 摄像头融合” 的方案 —— 激光雷达负责精准测量车辆与障碍物的距离,摄像头负责采集图像细节,两者结合能进一步提升 AVM 系统的环境感知精度,尤其在恶劣天气(如暴雨、大雾)下,激光雷达的抗干扰能力更强,可弥补摄像头的不足。
2. 算法优化:从 “静态拼接” 到 “动态智能分析”
未来的 AVM 系统将不再局限于 “图像拼接”,而是加入更多 “智能分析” 功能:
- 障碍物识别:通过 AI 算法,系统能自动识别全景图中的障碍物类型(如行人、车辆、儿童、宠物),并根据障碍物的危险程度发出不同等级的警报(如遇到儿童时发出最高级警报);
- 路径预测:结合方向盘角度、车辆速度等数据,系统能预测车辆未来 3-5 秒的行驶路径,并在全景图中用 “动态引导线” 显示,帮助驾驶员提前判断是否会与障碍物发生碰撞;
- 自动避障:在极端情况下(如驾驶员未及时发现障碍物),系统可与车辆的制动系统协同,自动施加制动,避免事故发生。
3. 场景融合:从 “驾驶辅助” 到 “多场景服务”
未来的 AVM 系统将突破 “驾驶辅助” 的局限,融入更多生活场景:
- 自动寻车:在大型停车场,驾驶员下车后,AVM 系统可通过手机 APP 向驾驶员发送车辆周围的图像,帮助驾驶员快速找到车辆;
- 远程监控:通过手机 APP,驾驶员可远程查看车辆周围的图像(如确认车辆是否被刮擦、是否有异物遮挡车牌);
- 行车记录:AVM 系统可自动记录车辆行驶过程中的全景图像,当发生交通事故时,这些图像可作为责任认定的证据(类似 “全景行车记录仪”)。
五、总结:AVM 系统 —— 驾驶体验的 “质变者”
从原理上看,AVM 系统是 “硬件采集 + 算法处理 + 场景适配” 的完美结合 —— 它通过多摄像头协同消除盲区,通过精密算法实现无缝拼接,通过场景化输出提升驾驶便利性。从应用上看,它不仅解决了停车、会车等日常驾驶中的痛点,还与其他安全系统协同,成为汽车安全的 “重要防线”。
随着技术的发展,AVM 系统将从 “看得见” 向 “看得懂、能预判、会决策” 进化,成为智能汽车的核心感知模块之一。对于普通消费者而言,AVM 系统已不再是 “高端车型的专属配置”,而是逐渐下放到 10 万元级别的家用车中,让更多人享受到科技带来的安全与便利。
如果你正在考虑购车,不妨将 “是否配备 AVM 系统” 作为重要参考 —— 毕竟,当你在狭窄车位轻松停车、在复杂路况从容会车时,就能真正体会到这项技术带来的 “驾驶自由”。