英伟达 Isaac Sim仿真平台体验【2】
一、产品基础信息
- 仿真平台:NVIDIA Isaac Sim 4.1.0
- 硬件配置:NVIDIA RTX 4090 ×2 (24GB显存)
- 核心特性:
- Omniverse内核的多GPU物理加速
- 原生PyTorch/TensorFlow集成支持
- 基于USD的场景构建体系
二、GPU加速仿真实战
▶ 多球体跌落测试
操作步骤:
- 创建基础场景:
Create > Physics > Collision Sphere生成初始球体 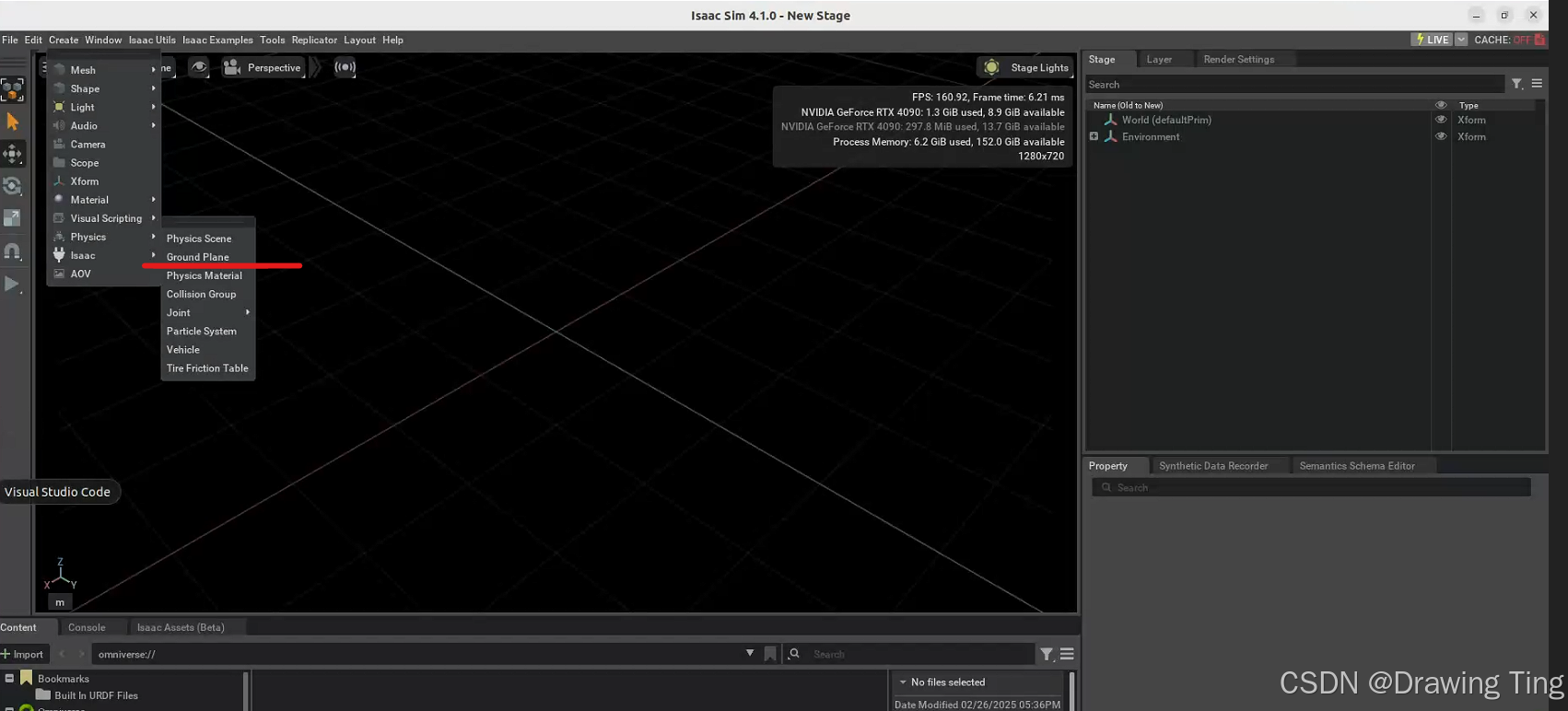
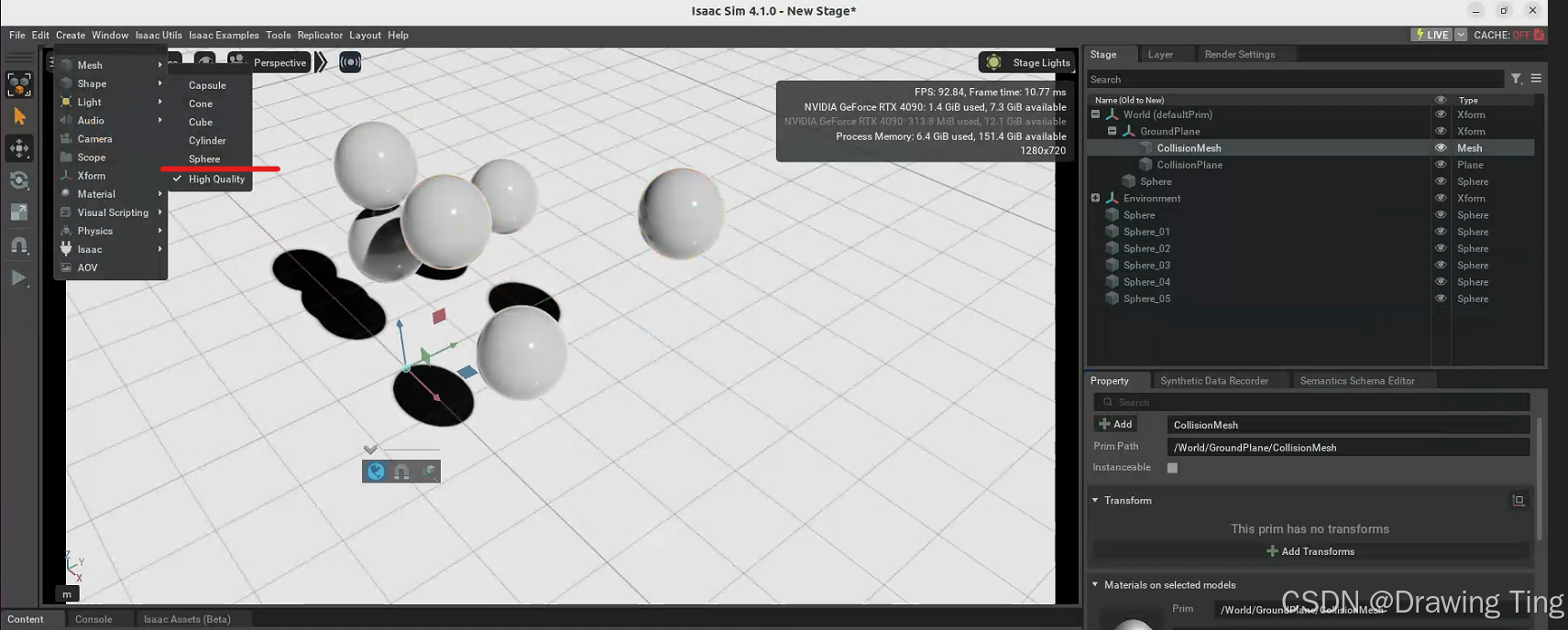
- 效果:
ball_fall
- 也可以批量复制脚本:
-
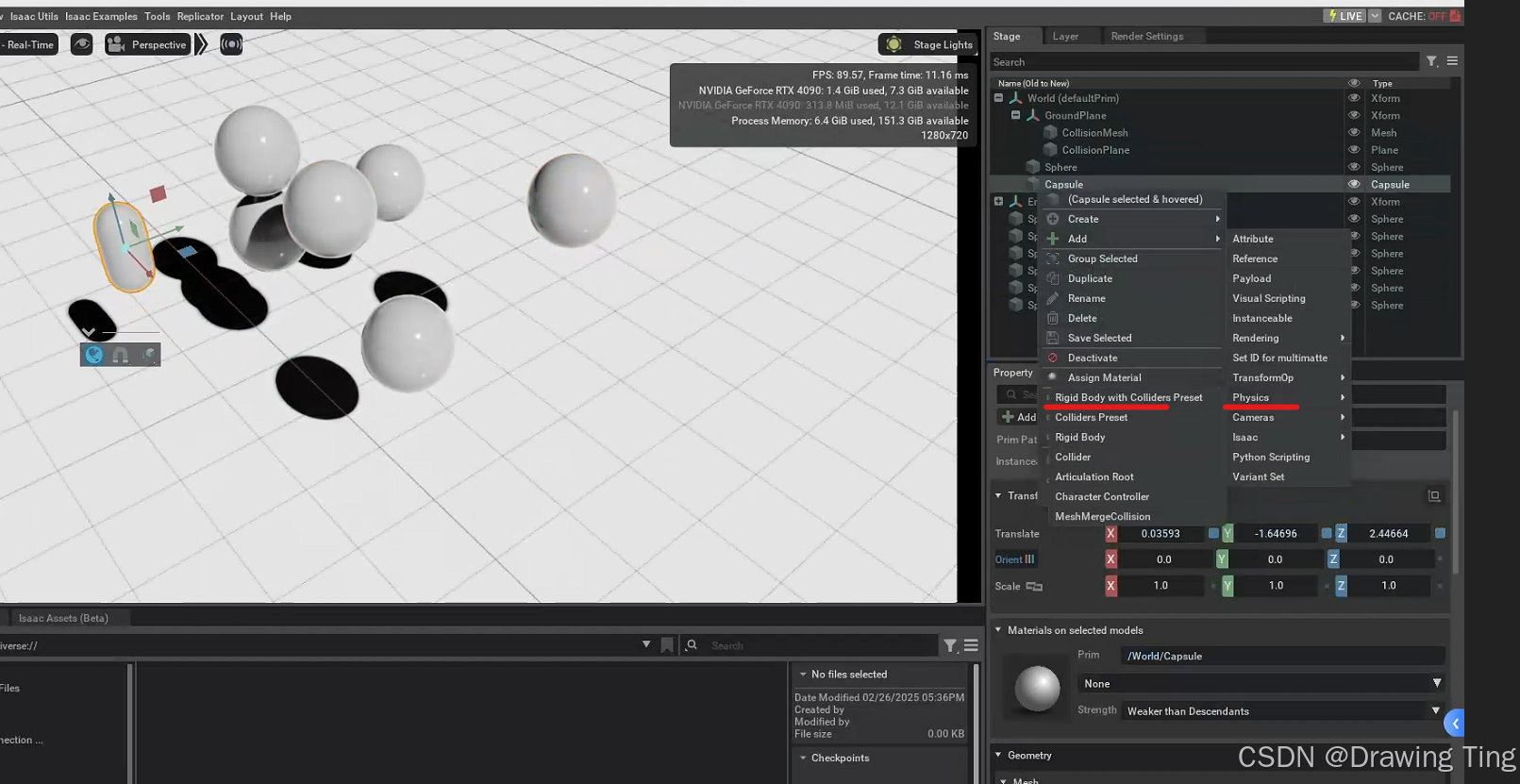
from omni.isaac.core.objects import DynamicSphere for i in range(80): DynamicSphere(prim_path=f"/World/Sphere_{i}", position=np.random.rand(3)*2) - 开启PhysX GPU加速:
-
/isaac-sim/python.sh --enable_gpu -
GPU并行化PhysX引擎通过CUDA核函数直接处理碰撞检测与刚体动力学计算,相比传统CPU物理引擎可获得20-50倍加速比。
三、AI框架集成开发
▶ 视觉分类任务(PyTorch集成)
相机传感器配置流程
可参考
Add Camera and Sensors — Isaac Sim 4.2.0 (OLD)
-
添加车载相机:
Create > Camera创建新相机- 在Stage树中将相机拖拽至机器人body组件下
- 调整位姿参数:
(x=-0.6, y=0, z=2.2, rx=0, ry=-80, rz=-90)
-
多视口监控:
-
# 创建双视口布局 viewport1 = ui.Workspace.get_window("Viewport") viewport2 = ui.Workspace.create_window("Camera View") - 图像流处理:
-
from omni.isaac.sensor import Camera camera = Camera(prim_path="/World/Robot/car_camera", resolution=(640, 480), dt=1/30)
效果:
camera_view_ball_fall
四、核心技术优势分析
开发便利性创新
- 可视化编程:通过Camera Inspector扩展实时监控相机参数:
from omni.isaac.sensor import _sensor
_sensor.acquire_camera_inspector_interface().set_focal_length(35)
AI协同生态
支持RLlib、Stable Baselines3等框架一键接入:
from omni.isaac.gym.vec_env import VecEnvBase
env = VecEnvBase(headless=False)
五、工业应用前景展望
典型应用场景
- 物流分拣系统:在仿真环境中预训练视觉-动作策略,迁移到真实UR机械臂实测
- 自动驾驶测试:支持100+智能体同时进行避障训练
- 数字孪生工厂
学术研究价值
- 多Agent训练:支持1000+智能体并行训练,适合群体智能算法研究
六、改进建议与展望
现存问题
- 中文文档存在部分术语翻译不一致(如"Viewport"被译为"视窗"/"视口")
- PyTorch数据管道同步偶发延迟(约2%概率出现3帧以上延迟)
功能期待
- 中国本地化模型仓库加速
- 轻量化网页版编辑器