DQN在稀疏奖励中的局限性
问题链接:https://metaso.cn/s/ldbiABi
一、DQN在稀疏奖励环境中的局限性
- 收敛困难
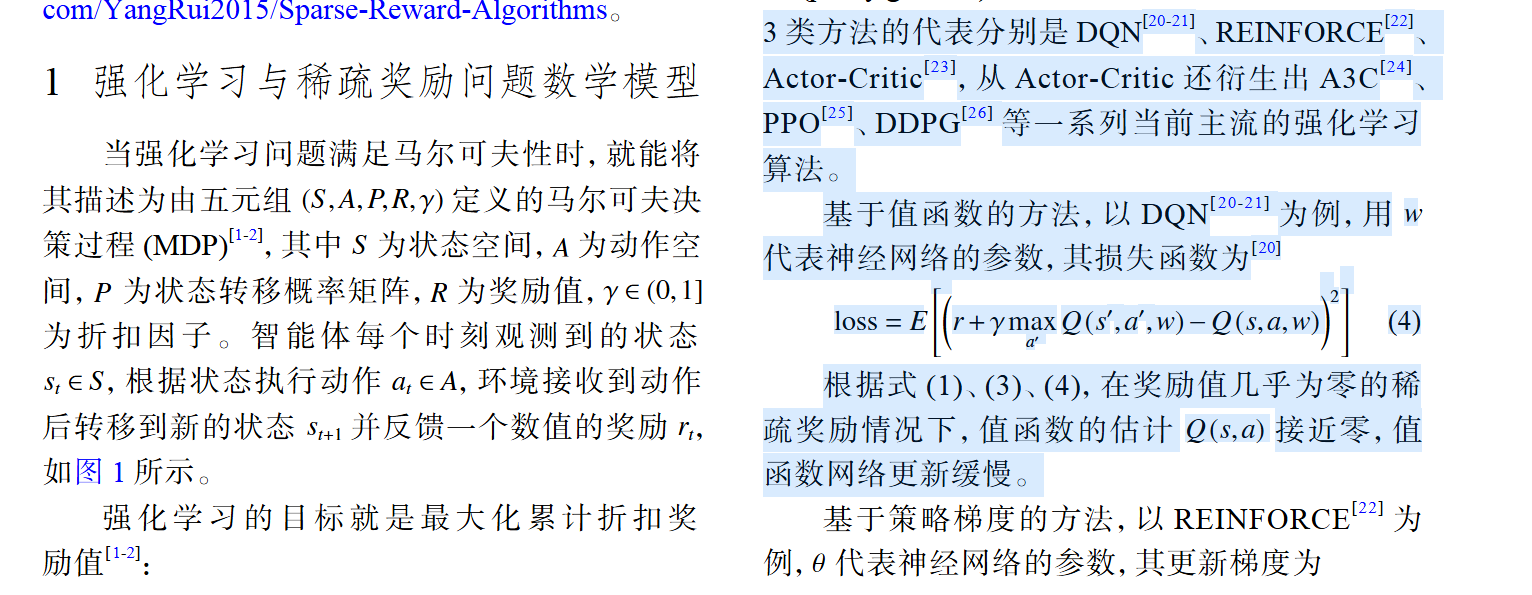
当奖励极度稀疏时(如千分之一的成功概率),DQN的Q函数更新会因TD误差趋近于零而停滞,导致学习效率极低甚至无法收敛。
均指出,传统DQN在高维状态空间中面临"奖励信号不足→值函数估计接近零→网络更新缓慢"的恶性循环。
更明确表示:“不能直接应用传统DQN解决存在稀疏奖励及巨大状态空间的问题”。
文献11
中关于稀疏奖励的结论

文献13 中关于稀疏奖励的问题模型
- 探索失效风险
6和文献12 强调,在庞大状态空间中,随机探索难以触及奖励状态(如围棋的终局胜利),智能体可能永远无法获得有效学习信号。进一步指出,稀疏奖励会导致学习到的Q函数过于平坦,无法引导策略优化。
文献12:《强化学习的数学原理》的第五章
二、解决稀疏奖励的核心方法
(1)奖励塑形(Reward Shaping)
原理:通过设计中间奖励引导智能体(如接近目标时给予小奖励),形成"奖励梯度场"。
实践案例:
- 无人机避障研究,通过动态调整奖励权重(距离障碍越近惩罚越大),使每一步动作获得即时反馈。
- 在无人机通信任务中验证,奖励塑形可将训练效率提升40%以上。
局限:需领域知识,不当设计可能导致智能体学习到次优策略(警告奖励与最终目标可能脱节)。
(2)内在好奇心机制(Intrinsic Curiosity)
原理:为探索行为赋予内在奖励(如预测模型误差),激励智能体主动访问未知状态。
算法创新:
文献10提出"多层内在奖励框架",结合状态新颖性和目标导向奖励,在Atari游戏中显著提升稀疏环境下的探索效率。
的PER-DQN进一步通过优先级经验回放,放大关键探索经验的权重。
文献10
(3)分层强化学习(Hierarchical RL)
原理:将任务分解为子任务(如"移动→避障→抵达目标"),每个子任务设计稠密奖励。
优势:文献14指出,该方法可突破"端到端DQN"的泛化限制,尤其适用于行为连续的复杂任务。
文献14
(4)架构改进与混合算法
- Dueling DQN:文献7 提出的价值/优势函数分离架构,能更敏感地捕捉稀疏奖励下的动作差异。
- 结合策略梯度:建议在极端稀疏场景中采用DDPG等Actor-Critic算法,避免值函数估计的平坦化问题。
文献7:
三、高维状态空间的协同解决方案
1, 特征提取增强:指出,DQN的卷积网络可自动学习高维状态(如图像)的特征表示,但需配合课程学习(Curriculum Learning)逐步增加状态复杂度。
2. 混合探索策略:
文献10和文献18,共同验证,将好奇心机制与ε-greedy探索结合,可覆盖更广的状态空间。
3. 元学习辅助:17提到,利用已有数据构建状态关联模型(如基于图的记忆网络),可加速稀疏奖励下的价值传播。