【无人机】自检arming参数调整选项
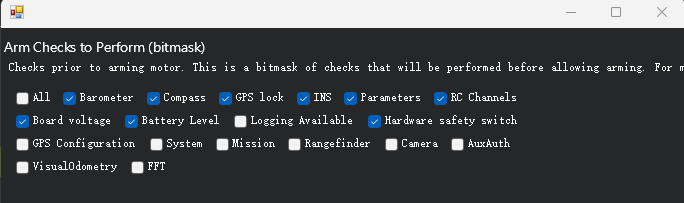
| 检查项目 (英文名) | 中文含义 | 检查内容 | 四旋翼建议 (新手 → 老手) | 理由说明 |
|---|---|---|---|---|
| All | 所有检查 | 启用下面所有的检查项目。 | ✅ 强烈建议勾选 | 这是最安全的设置,确保所有关键系统正常。 |
| Barometer | 气压计 | 检查气压计是否健康、数据是否稳定。 | ✅ 必须勾选 | 用于定高模式,数据异常会导致高度剧烈变化。 |
| Compass | 罗盘/指南针 | 检查罗盘是否存在、数据是否合理、是否校准过。 | ✅ 必须勾选 | 核心传感器,用于方向锁定、返航。错误会导致“马桶效应”乱飞。 |
| GPS Lock | GPS锁定 | 检查是否有至少6颗以上卫星(3D Lock)且定位精度(HDOP)足够高。 | ✅ 建议勾选 (可适当放宽) | 保证返航(RTL)和悬停(Loiter)模式能正常工作。新手可设为 >=6 颗星,HDOP <2.0。 |
| INS | 惯性导航单元 | 检查陀螺仪、加速度计是否已校准、数据是否正常。 | ✅ 必须勾选 | 最核心的传感器,不健康根本无法飞行。 |
| Parameters | 参数 | 检查是否有重要的参数未设置或设置不合理。 | ✅ 建议勾选 | 防止因参数错误导致炸机。 |
| RC Channels | 遥控器通道 | 检查遥控器所有通道信号是否正常,油门是否在最低位。 | ✅ 必须勾选 | 防止因遥控器失控或油门未最低位而意外起飞。 |
| Board Voltage | 飞控板电压 | 检查飞控板的5V供电电压是否在安全范围内。 | ✅ 建议勾选 | 防止因飞控供电不足导致重启炸机。 |
| Battery Level | 电池电量 | 检查动力电池电压是否高于你设置的最低电压值。 | ✅ 强烈建议勾选 | 极其重要! 防止低电量起飞,直接摔机。 |
| Logging Available | 日志记录可用 | 检查SD卡是否插入且可写入日志文件。 | ⭕ 可不勾选 | 日志用于事后分析问题,不影响飞行安全。可禁用。 |
| Hardware Safety Switch | 硬件安全开关 | 检查飞控上的物理安全开关是否被按下。 | ⭕ 按需勾选 | 如果您的飞控有物理开关且想用它,就勾选。通常可不勾。 |
| AuxAuth | 辅助认证 | 一种高级安全功能,如使用手机APP解锁。 | ⭕ 可不勾选 | 除非您确切知道这是什么并配置了它,否则禁用。 |
| Rangefinder | 测距雷达 | 检查测距雷达(如光流、激光)数据是否正常。 | ⭕ 按需勾选 | 如果您的飞机没有安装这些设备,务必不要勾选,否则无法解锁。 |
| Camera | 相机 | 检查云台相机反馈是否正常。 | ⭕ 按需勾选 | 如果没有相关配置,不要勾选。 |
| Visual Odometry | 视觉里程计 | 检查视觉定位系统数据是否正常。 | ⭕ 按需勾选 | 如果没有安装(如Intel T265),不要勾选。 |
| FFT | 频谱分析 | 一种新型的基于振动的硬件健康检查。 |
资料
Alt Hold定高模式 · copter