搜维尔科技:全身可穿戴Teslasuit动捕服的功能,自立式FES装置
功能性电刺激 (FES) 设备广泛应用于康复和医疗实践。其底层技术利用低能量电脉冲,在中风、脊髓损伤、多发性硬化症、脑瘫等各种疾病患者中人工产生身体运动。
一般来说,FES系统可以分为三类:开环、有限状态控制和闭环方法。
这三种方法描述了 FES 系统从简单到复杂的阶段或演进。所有提到的方法都可以借助 Teslasuit 实现并提供给最终用户。我们认为,这种统一可以覆盖并简化FES决策生命周期的大多数阶段,从实验室开发、学生和个人教育,到临床应用。
研究目标
这项探索性研究旨在检验全身可穿戴Teslasuit技术作为自立式FES设备在医疗和康复领域的应用能力。具体而言,旨在确认Teslasuit可用作开环、有限状态控制或闭环系统。

材料和方法
在本研究中,研究人员使用了全身Teslasuit、Teslasuit软件开发套件(带有Haptic Editor工具和Suit客户端API的SDK)以及需要时的外部操作代码。
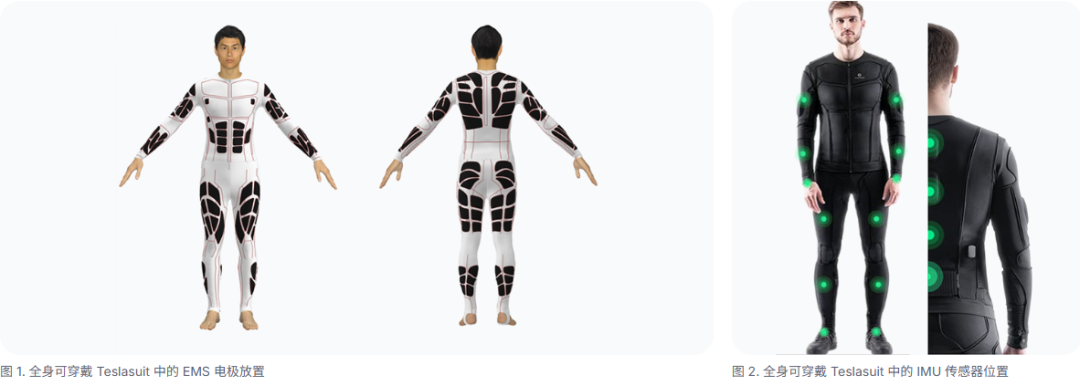
全身Teslasuit配备了一个标准的电刺激系统,该系统包含80个通道(每个肢体16个,背部和腹部16个,见图1),以及一个包含14个惯性测量单元 (IMU) 传感器的无标记运动捕捉系统(MoCap系统,见图 2)。触觉编辑工具允许为80个EMS通道中的每一个创建、调整和运行具有各种信号参数的刺激模式,固定电压为60伏:刺激频率可在1 至150Hz范围内调整,刺激脉冲宽度可在1至320μs范围内调整。
为了测试Teslasuit技术是否可用于FES,研究人员应用了不同FES方法的一般描述,并使用该技术的内置功能重现功能,或通过Suit客户端API以最小可行产品 (MVP) 的形式使用其他外部功能对其进行扩展。
Teslasuit作为开环FES设备

一个开环系统已在Teslasuit上层软件中开发并实现,作为触觉编辑器工具(见图3)。触觉编辑器允许创建复杂的刺激模式,可在任何EMS通道内随时间改变不同的电参数,或组合所有80个EMS通道之间的刺激模式。所有这些模式都可以保存为文件,以便以后用于相同或其他测试对象。
一个简单的案例场景包括:
- 将套装连接到计算机和触觉编辑器。
- EMS系统校准。
- 在触觉编辑器中创建和调整EMS刺激模式。
- 运行刺激模式可按时间循环或通过点击“开始”按钮进行。触觉编辑器中的虚拟“开始”按钮可以替换为真实世界的机械按钮或其他触发器(通过API连接到第三方设备)。

作为一个用于创建复杂刺激模式的可视化工具,Haptic Editor提供了几乎无限的可能性,可以将Teslasuit技术调整为开环FES设备,以满足任何需求。因此,Teslasuit技术可以作为开环FES设备,无需额外扩展,是一个开箱即用的解决方案,但仅用于研究目的。
学术课程
与Teslasuit建立学术研究合作关系,可享受学术研究折扣,开展 XR 和医疗领域的尖端研究。我们正在寻找以下领域的合作伙伴:
- 基础和应用XR研究(沉浸式XR教育、XR医疗筛查和诊断、XR娱乐等的新方法)
- 使用Teslasuit对现有诊断和康复方法进行临床试验
- 生物力学分析的新方法(利用基于IMU的运动捕捉或EMG或两者进行长期生物力学监测和任务特定分析)
- 电刺激(触觉、EMS、TENS、FES、IFS) 的基础与应用研究
- 生物医学大数据算法开发(MoCap、EMG、PPG、ECG、HRV、BIA等)
Teslasuit 作为有限状态FES设备

为了验证Teslasuit技术在有限状态FES中的应用,研究人员使用了一个运动捕捉接口及其应用的数据处理解决方案——步进检测器。步进检测器是一个SLTM神经网络模型,基于预先收集的IMU数据(加速度计和陀螺仪)进行训练,这些数据来自6名健康受试者在行走过程中的双腿和背部。该模型使用标准机器学习流程进行训练,数据分为训练数据集 (80%)、测试数据集 (10%) 和验证数据集 (10%)。验证数据集的准确率超过 90%。
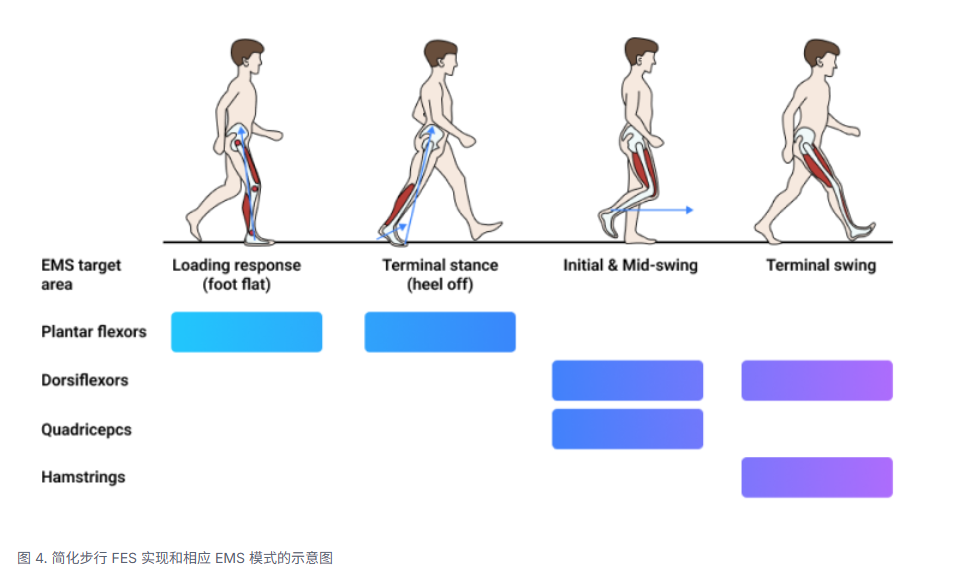
步进检测器分别提供每只脚与地面接触的信息。这些时间序列数据足以正确检测四个步行阶段(对应简化的步态周期,见图4):初始站立、终止站立、初始摆动、终止摆动。简化的电刺激模式也相应分配。
一个简单的案例场景包括:
- 将套装连接到计算机。
- EMS系统校准。
- 运动捕捉系统校准。
支撑期以跖屈肌收缩为标志,随后在整个摆动期,背屈肌持续收缩。初始摆动后,进行股四头肌刺激以伸展腿部。腘绳肌刺激(可选)从摆动末期开始,以稳定腿部,防止在完全伸展的肢体上迈步。
由于一些实施方面的问题和肌肉生理学的原因,实际检测到的摆动阶段与股四头肌刺激引起的实际膝关节伸展之间存在150-200毫秒的延迟。因此,股四头肌刺激算法会在初始摆动检测后立即启动,以便在摆动中期辅助膝关节伸展。
开环方法的大部分讨论点都“继承”到了此MVP中。由于有限状态系统严重依赖输入数据,因此需要对MoCap系统进行额外验证,提供一组步数检测触发器。更复杂的 MoCap数据,例如踝关节角度、角速度、角加速度,可以作为替代触发器进行测试。为了方便最终用户,所有MVP功能(例如校准、EMS 模式编辑器和跑步界面)最好都集成到我们的独立程序中。
中期结果:Teslasuit技术能够用作有限状态FES设备。
Teslasuit作为闭环FES设备
为了验证该概念,我们构建了一个基于简化闭环控制概念的MVP,用于简单的肘部屈曲控制任务。Teslasuit运动捕捉系统提供当前肘部角度的实时数据,并将其与操作员设定的目标值进行比较。当前角度与目标角度之间的差异(即由此产生的误差)由PID控制器处理,从而调整所需的二头肌刺激水平。
目前,采用肌肉响应函数,进一步利用经典的Ziegler-Nichols方法选择PID控制器的系数,解决了针对每个特定用户的PID控制器校准算法的问题。
一个简单的案例场景包括:
- 将套装连接到计算机。
- EMS系统校准。
- PID控制器校准。
中期结果:根据专注于FES的医疗保健专业人士的建议,有可能改进这个MVP。
关于搜维尔科技
搜维尔科技作为Teslasuit动作捕捉系统的中国大陆授权代理经销商全力为您提供优质服务。我们希望将更多标杆级与应用尖端技术的科技产品带入到蓬勃发展的国内市场中,以协助更多企业与高校拓展技术开发、探索创新领域。