虚实结合双机导航-gazebo-ros
清单:
一个路由器;
幻尔机器人1台;
一个在gazebo中的虚拟机器人tbmn_01一台。
网络配置
查看无线接口名称
ip link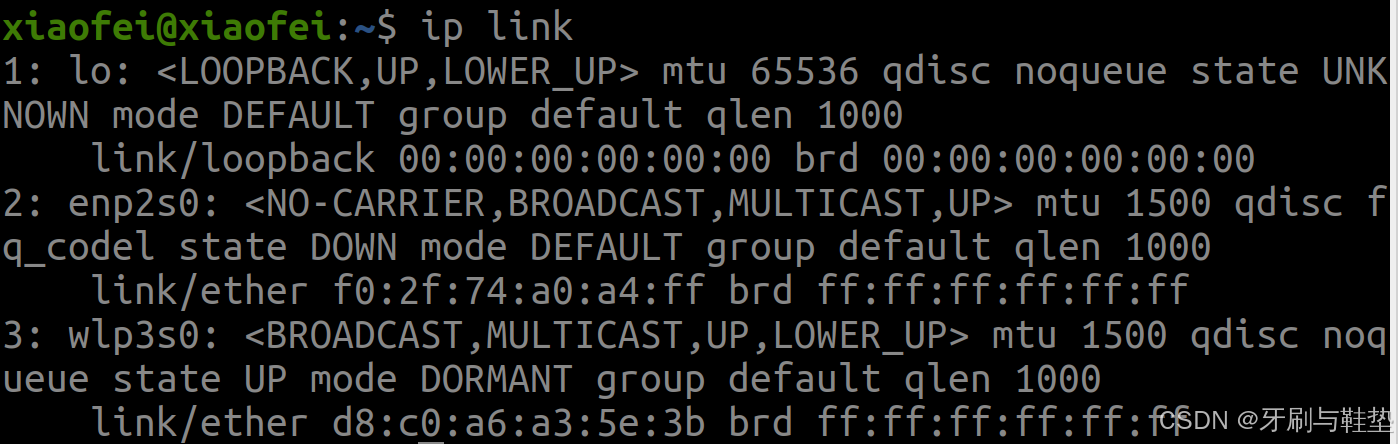 我的接口是wlp3s0
我的接口是wlp3s0
连上wifi扫描当前局域网下ip(wlp3s0)
sudo arp-scan --interface= wlp3s0 --localnet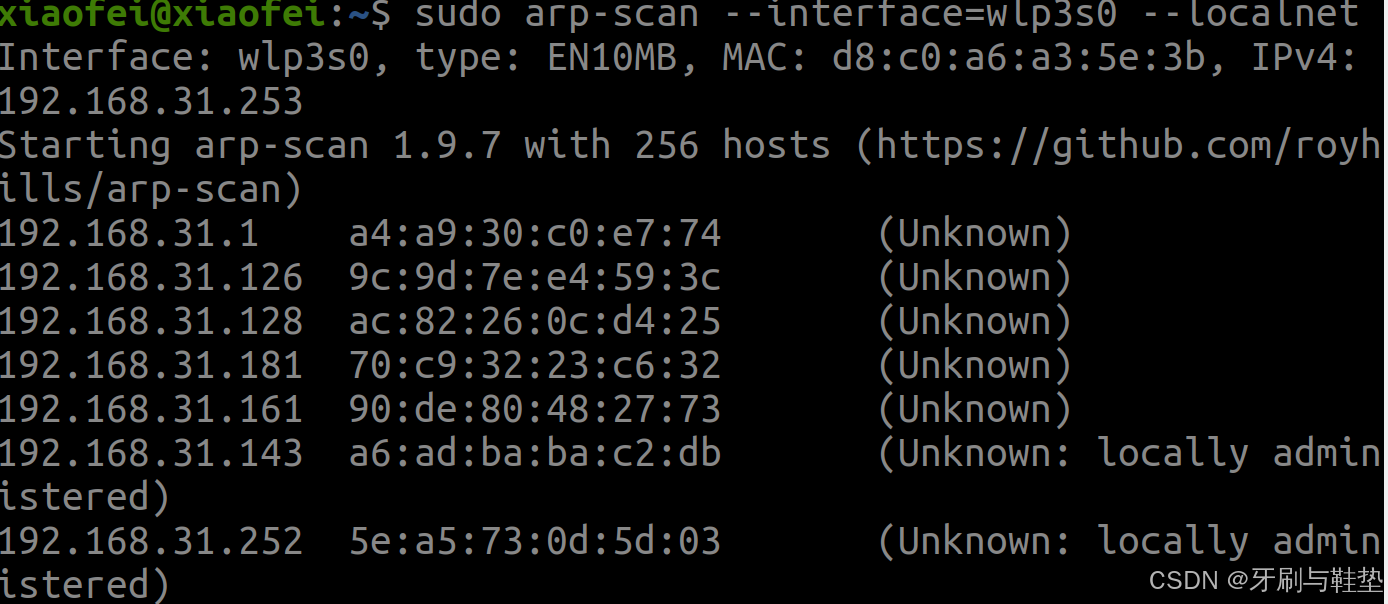
ssh链接小车
ssh wheeltec@192.168.31.161
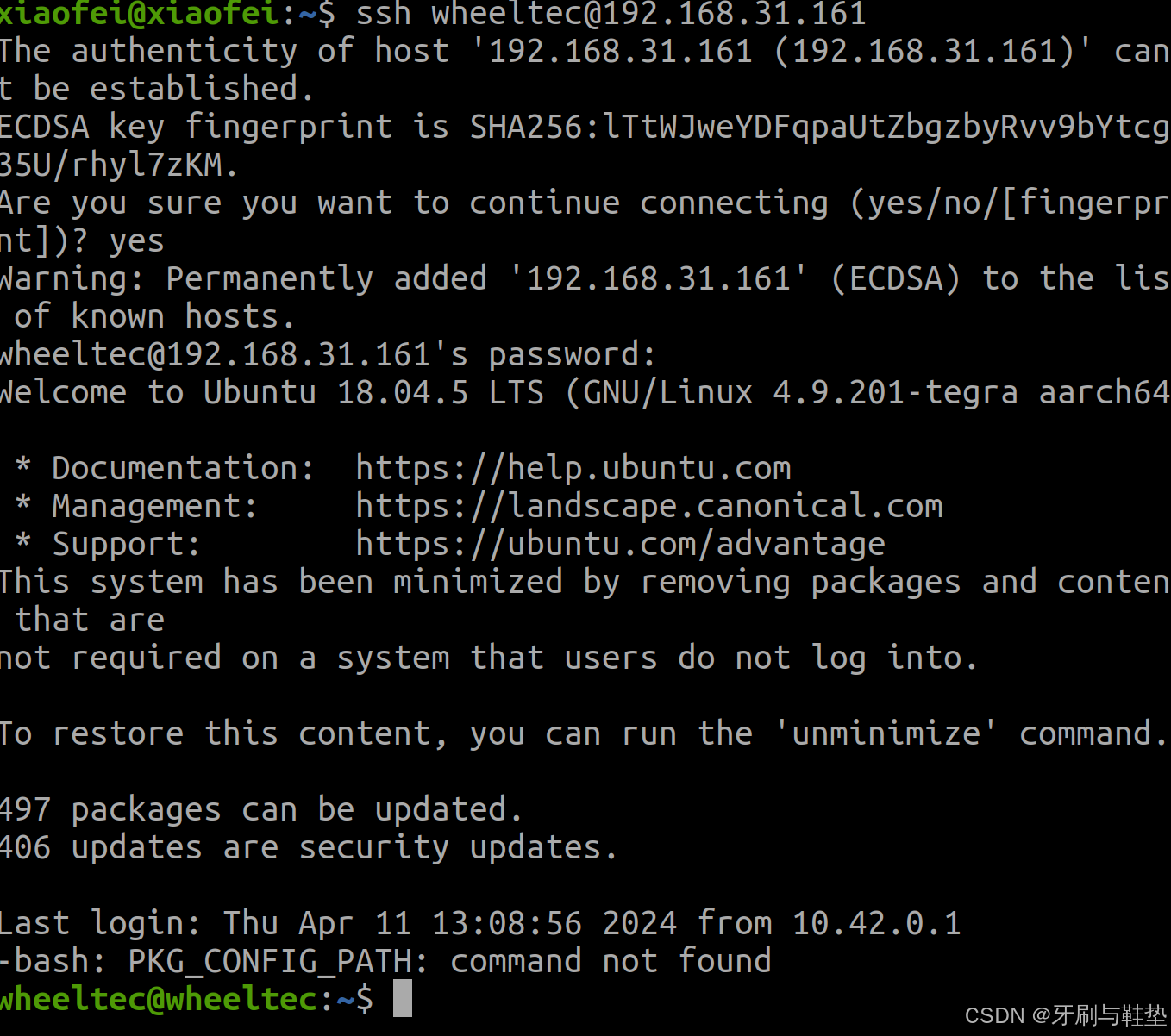
成功ssh链接上终端
查看主机ip
hostname -I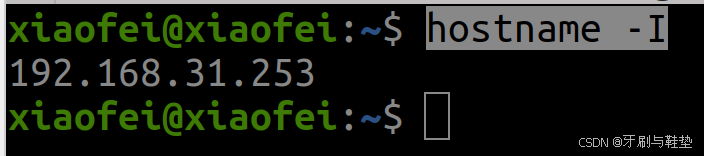
这一行设置了 ROS Master 的 URI(统一资源标识符)。ROS Master 是ROS网络的中心协调点,负责处理节点之间的通信。每个ROS节点都需要知道ROS Master的位置。
ROS Master URI 是ROS Master节点的地址,其他节点通过这个地址与ROS Master进行通信。
所以所有的终端都要输入
export ROS_MASTER_URI=http://192.168.31.253:11311
这一行设置了 ROS节点的主机名。每个ROS节点需要一个唯一的主机名,以便于在ROS网络中识别和通信。
export ROS_HOSTNAME=192.168.31.253 我要把节点放在pc端所以
需要在wheeltec的终端下输入主机的ip(所有的终端都输入)
export ROS_HOSTNAME=192.168.31.161pc终端
export ROS_HOSTNAME=192.168.31.253克隆文件夹到本地
sudo scp -r wheeltec@192.168.31.161:~/wheeltec_robot/src/ /mnt/ros1_7000 对于我来说最难分的就是主机和从机
对于我来说最难分的就是主机和从机
时间同步问题
主机跟从机都要输入
sudo service ntp restart # 重启 NTP 服务从机上的终端也要使用仿真时间
export ROS_USE_SIM_TIME=true
或者navigation.launch文件中加上
<param name="use_sim_time" value="true"/>
查看时间
date工作空间修改记录~/wheeltec_robot/src/turn_on_wheeltec_robot
gedit launch/include/teb_local_planner.launch<launch>
<!-- 迷你机器人,基础参数 -->
<arg name="robot_name" default="wheeltec_01" />
<arg name="scan_topic" default="scan" />
<arg name="odom_topic" default="odom_combined" />
<arg name="cmd_vel_topic" default="cmd_vel" />
<!-- TF坐标变换,基础参数wxf -->
<arg name="laser_frame_id" default="laser" />
<arg name="global_frame_id" default="$(arg robot_name)/map" />
<arg name="base_frame_id" default="base_link" />
<arg name="odom_frame_id" default="$(arg robot_name)/odom_combined" />
<!-- Arguments参数 -->
<arg name="car_mode" default="" />
<!-- 导航路径规划公共参数 -->
<rosparam file="$(find turn_on_wheeltec_robot)/params_nav_common/move_base_params.yaml" command="load" ns="move_base"/>
<rosparam file="$(find turn_on_wheeltec_robot)/params_nav_common/base_global_planner_param.yaml" command="load" ns="move_base"/>
<!-- 导航TEB局部路径规划器参数 -->
<param name="move_base/base_local_planner" type="string" value="teb_local_planner/TebLocalPlannerROS"/>
<rosparam file="$(find turn_on_wheeltec_robot)/params_nav_common/teb_local_planner_params.yaml" command="load" ns="move_base"/>
<!-- 导航代价地图公共参数 -->
<rosparam file="$(find turn_on_wheeltec_robot)/params_costmap_common/costmap_common_params.yaml" command="load" ns="move_base/global_costmap"/>
<rosparam file="$(find turn_on_wheeltec_robot)/params_costmap_common/costmap_common_params.yaml" command="load" ns="move_base/local_costmap"/>
<rosparam file="$(find turn_on_wheeltec_robot)/params_costmap_common/local_costmap_params.yaml" command="load" ns="move_base"/>
<rosparam file="$(find turn_on_wheeltec_robot)/params_costmap_common/global_costmap_params.yaml" command="load" ns="move_base"/>
<!-- 启动导航节点 -->
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<!-- 导航代价地图与路径规划器对应车型参数 -->
<rosparam file="$(find turn_on_wheeltec_robot)/params_costmap_car/param_$(arg car_mode)/teb_local_planner_params.yaml" command="load"/>
<rosparam file="$(find turn_on_wheeltec_robot)/params_costmap_car/param_$(arg car_mode)/costmap_car_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find turn_on_wheeltec_robot)/params_costmap_car/param_$(arg car_mode)/costmap_car_params.yaml" command="load" ns="local_costmap" />
<!--wxf-->
<param name="base_global_planner" value="TC_planner/TCPlannerROS" />
<!-- reset frame_id parameters using user input data -->
<param name="global_costmap/global_frame" value="$(arg global_frame_id)" />
<param name="global_costmap/robot_base_frame" value="$(arg base_frame_id)" />
<param name="local_costmap/global_frame" value="$(arg odom_frame_id)" />
<param name="local_costmap/robot_base_frame" value="$(arg base_frame_id)" />
<!-- 我多点规划的参数设置 -->
<!-- <param name="mark" value="1" /> -->
<!-- 设置base_global_planner,注意这里是/不是:: -->
<!-- <param name="base_global_planner" value="AC_planner/ACPlannerROS" />-->
<!-- <param name="DWAPlannerROS/global_frame_id" value="$(arg odom_frame_id)" /> -->
<!-- <remap from="cmd_vel" to="$(arg cmd_vel_topic)" /> -->
<!-- <remap from="odom" to="$(arg odom_topic)" /> -->
<!-- <remap from="scan" to="$(arg scan_topic)" /> -->
</node>
</launch>
gedit launch/robot_model_visualization.launch 相关工具代码
<launch>
<!--wxf-->
<arg name="robot_name" default="wheeltec_01" />
<!-- Arguments参数 -->
<arg name="car_mode" default="" />
<arg name="if_voice" default="false"/>
<!-- 用于robot_state_publisher节点-->
<node pkg="tf" type="static_transform_publisher" name="base_to_link" args="0 0 0 0 0 0 $(arg robot_name)/base_footprint base_link 100" />
<!--坐标变换,需要实测 -->
<!--阿克曼系列 -->
<!-- car_mode and tf mini_akm-->
<group if="$(eval car_mode == 'mini_akm')">
<!-- 用于雷达节点,后面同理不再赘述-->
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.125 0.00 0.15 3.14 0 0 base_footprint laser 100" />
<!-- 用于摄像头相关节点,如3d建图导航,后面同理不再赘述-->
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="0.185 0.00 0.1 0 0 0 base_footprint camera_link 100" />
<!-- 用于robot_pose_ekf节点,后面同理不再赘述-->
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" />
</group>
<!-- car_mode and tf senior_akm-->
<group if="$(eval car_mode == 'senior_akm')">
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.26 0.00 0.228 3.14 0 0 base_footprint laser 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="0.34 0.00 0.178 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" />
</group>
<!-- car_mode and tf top_akm_bs-->
<group if="$(eval car_mode == 'top_akm_bs')">
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.53 0.00 0.278 3.14 0 0 base_footprint laser 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="0.59 0.00 0.228 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" />
</group>
<!-- car_mode and tf top_akm_dl-->
<group if="$(eval car_mode == 'top_akm_dl')">
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.52 0.00 0.350 3.14 0 0 base_footprint laser 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="0.58 0.00 0.30 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" />
</group>
<!--麦轮系列 wxf 加了$(arg robot_name)/-->
<!-- car_mode and tf mini_mec-->
<group if="$(eval car_mode == 'mini_mec')">
<!-- 用于雷达节点,后面同理不再赘述-->
<!-- <node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.06 0.00 0.20 3.14 0 0 base_footprint laser 100" /> -->
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.06 0.00 0.20 3.14 0 0 $(arg robot_name)/base_footprint laser 100" />
<!-- 用于摄像头相关节点,如3d建图导航,后面同理不再赘述-->
<!-- <node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="0.12 0 0.15 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" /> -->
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="0.12 0 0.15 0 0 0 $(arg robot_name)/base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 $(arg robot_name)/base_footprint gyro_link 100" />
</group>
<!-- car_mode and tf mini_mec_moveit-->
<group if="$(eval car_mode == 'mini_mec_moveit_four')">
<!-- 用于雷达节点,后面同理不再赘述-->
<!--node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.048 0.00 0.18 3.925 0 0 base_footprint laser 100" /--> <!--A2 laser-->
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.048 0.00 0.18 3.14 0 0 base_footprint laser 100" /> <!--A1 laser-->
<!-- 用于摄像头相关节点,如3d建图导航,后面同理不再赘述-->
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="-0.118 0 0.50 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" />
</group>
<group if="$(eval car_mode == 'mini_mec_moveit_six')">
<!-- 用于雷达节点,后面同理不再赘述-->
<!--node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.048 0.00 0.18 3.925 0 0 base_footprint laser 100" /--> <!--A2 laser-->
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.048 0.00 0.11 3.14 0 0 base_footprint laser 100" /> <!--A1 laser-->
<!-- 用于摄像头相关节点,如3d建图导航,后面同理不再赘述-->
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="-0.118 0 0.55 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" />
</group>
<!-- car_mode and tf senior_mec_bs-->
<group if="$(eval car_mode == 'senior_mec_bs')">
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.12 0.00 0.165 3.14 0 0 base_footprint laser 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="0.18 0 0.115 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" />
</group>
<!-- car_mode and tf senior_mec_dl-->
<group if="$(eval car_mode == 'senior_mec_dl')">
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.18 0.00 0.32 3.14 0 0 base_footprint laser 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="0.240 0 0.27 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" />
</group>
<!-- car_mode and tf top_mec_bs-->
<group if="$(eval car_mode == 'top_mec_bs')">
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.18 0.00 0.32 3.14 0 0 base_footprint laser 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="0.240 0 0.27 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" />
</group>
<!-- car_mode and tf top_mec_dl-->
<group if="$(eval car_mode == 'top_mec_dl')">
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.18 0.00 0.32 3.14 0 0 base_footprint laser 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="0.240 0 0.27 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" />
</group>
<!-- car_mode and tf senior_mec_EightDrive-->
<group if="$(eval car_mode == 'senior_mec_EightDrive')">
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.26 0.00 0.23 3.14 0 0 base_footprint laser 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="0.320 0 0.18 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" />
</group>
<!-- car_mode and tf top_mec_EightDrive-->
<group if="$(eval car_mode == 'top_mec_EightDrive')">
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.26 0.00 0.23 3.14 0 0 base_footprint laser 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="0.320 0 0.18 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" />
</group>
<!-- car_mode and tf flagship_mec_dl-->
<group if="$(eval car_mode == 'flagship_mec_dl')">
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.20 0.00 0.34 3.14 0 0 base_footprint laser 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="0.240 0 0.27 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" />
</group>
<!-- car_mode and tf flagship_mec_bs-->
<group if="$(eval car_mode == 'flagship_mec_bs')">
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.20 0.00 0.34 3.14 0 0 base_footprint laser 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="0.240 0 0.27 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" />
</group>
<!--全向轮系列 -->
<!-- car_mode and tf mini_omni-->
<group if="$(eval car_mode == 'mini_omni')">
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.015 0.00 0.17 3.14 0 0 base_footprint laser 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="0.075 0.00 0.12 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" />
</group>
<!-- car_mode and tf senior_omni-->
<group if="$(eval car_mode == 'senior_omni')">
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.09 0.00 0.25 3.14 0 0 base_footprint laser 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="0.15 0.00 0.20 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" />
</group>
<!-- car_mode and tf top_omni-->
<group if="$(eval car_mode == 'top_omni')">
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.18 0.00 0.28 3.14 0 0 base_footprint laser 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="0.24 0.00 0.23 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" />
</group>
<!--四驱系列 -->
<!-- car_mode and tf mini_4wd-->
<group if="$(eval car_mode == 'mini_4wd')">
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.06 0.00 0.20 3.14 0 0 base_footprint laser 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="0.12 0 0.15 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" />
</group>
<!-- car_mode and tf mini_4wd_moveit_four-->
<group if="$(eval car_mode == 'mini_4wd_moveit_four')">
<!-- 用于雷达节点,后面同理不再赘述-->
<!--node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.048 0.00 0.18 3.925 0 0 base_footprint laser 100" /--> <!--A2 laser-->
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.048 0.00 0.18 3.14 0 0 base_footprint laser 100" /> <!--A1 laser-->
<!-- 用于摄像头相关节点,如3d建图导航,后面同理不再赘述-->
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="-0.118 0 0.50 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" />
</group>
<!-- car_mode and tf mini_4wd_moveit_six-->
<group if="$(eval car_mode == 'mini_4wd_moveit_six')">
<!-- 用于雷达节点,后面同理不再赘述-->
<!--node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.048 0.00 0.18 3.925 0 0 base_footprint laser 100" /--> <!--A2 laser-->
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.048 0.00 0.18 3.14 0 0 base_footprint laser 100" /> <!--A1 laser-->
<!-- 用于摄像头相关节点,如3d建图导航,后面同理不再赘述-->
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="-0.118 0 0.50 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" />
</group>
<!-- car_mode and tf senior_4wd_bs-->
<group if="$(eval car_mode == 'senior_4wd_bs')">
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.12 0.00 0.228 3.14 0 0 base_footprint laser 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="0.18 0 0.178 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" />
</group>
<!-- car_mode and tf senior_4wd_dl-->
<group if="$(eval car_mode == 'senior_4wd_dl')">
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.18 0.00 0.36 3.14 0 0 base_footprint laser 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="0.240 0 0.31 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" />
</group>
<!-- car_mode and tf top_4wd_bs-->
<group if="$(eval car_mode == 'top_4wd_bs')">
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.18 0.00 0.36 3.14 0 0 base_footprint laser 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="0.240 0 0.31 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" />
</group>
<!-- car_mode and tf top_4wd_dl-->
<group if="$(eval car_mode == 'top_4wd_dl')">
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.18 0.00 0.37 3.14 0 0 base_footprint laser 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="0.240 0 0.32 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" />
</group>
<!-- car_mode and tf flagship_4wd_bs-->
<group if="$(eval car_mode == 'flagship_4wd_bs')">
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="-0.05 0.00 0.364 3.14 0 0 base_footprint laser 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="0.01 0.00 0.324 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" />
</group>
<!-- car_mode and tf flagship_4wd_dl-->
<group if="$(eval car_mode == 'flagship_4wd_dl')">
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="-0.05 0.00 0.364 3.14 0 0 base_footprint laser 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="0.01 0.00 0.324 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" />
</group>
<!--差速系列 -->
<!-- car_mode and tf mini_tank-->
<group if="$(eval car_mode == 'mini_tank')">
<!-- 用于雷达节点,后面同理不再赘述-->
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.04 0.00 0.21 3.14 0 0 base_footprint laser 100" />
<!-- 用于摄像头相关节点,如3d建图导航,后面同理不再赘述-->
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="0.1 0.00 0.16 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" />
</group>
<!-- car_mode and tf mini_tank_moveit-->
<group if="$(eval car_mode == 'mini_tank_moveit_four')">
<!-- 用于雷达节点,后面同理不再赘述-->
<!--node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.048 0.00 0.18 3.925 0 0 base_footprint laser 100" /--> <!--A2 laser-->
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.048 0.00 0.18 3.14 0 0 base_footprint laser 100" /> <!--A1 laser-->
<!-- 用于摄像头相关节点,如3d建图导航,后面同理不再赘述-->
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="-0.118 0 0.50 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" />
</group>
<!-- car_mode and tf mini_diff-->
<group if="$(eval car_mode == 'mini_diff')">
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.125 0.00 0.16 3.14 0 0 base_footprint laser 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="0.185 0.00 0.11 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" />
</group>
<!-- car_mode and tf senior_diff-->
<group if="$(eval car_mode == 'senior_diff')">
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.23 0.00 0.20 3.14 0 0 base_footprint laser 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="0.29 0.00 0.15 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" />
</group>
<!-- car_mode and tf four_wheel_diff_bs-->
<group if="$(eval car_mode == 'four_wheel_diff_bs')">
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="-0.05 0.00 0.36 3.14 0 0 base_footprint laser 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="0.01 0.00 0.31 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" />
</group>
<!-- car_mode and tf four_wheel_diff_dl-->
<group if="$(eval car_mode == 'four_wheel_diff_dl')">
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="-0.05 0.00 0.36 3.14 0 0 base_footprint laser 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="0.01 0.00 0.31 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" />
</group>
<!-- car_mode and tf flagship_four_wheel_diff_dl-->
<group if="$(eval car_mode == 'flagship_four_wheel_diff_dl')">
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="-0.05 0.00 0.36 3.14 0 0 base_footprint laser 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="0.01 0.00 0.31 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" />
</group>
<!-- car_mode and tf flagship_four_wheel_diff_bs-->
<group if="$(eval car_mode == 'flagship_four_wheel_diff_bs')">
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="-0.05 0.00 0.36 3.14 0 0 base_footprint laser 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="0.01 0.00 0.31 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="0 0 0 0 0 0 base_footprint gyro_link 100" />
</group>
<!-- car_mode and tf brushless_senior_diff-->
<group if="$(eval car_mode == 'brushless_senior_diff')">
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.036 0.00 0.26 3.14 0 0 base_footprint laser 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_camera" args="0.073 0.00 0.34 0 0 0 base_footprint camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_gyro" args="-0.194 -0.092 0.22 0 0 0 base_footprint gyro_link 100" />
</group>
<!-- URDF 标准化机器人描述格式 -->
<!--阿克曼系列 -->
<group if="$(eval car_mode == 'mini_akm')">
<param name = "robot_description" textfile = "$(find turn_on_wheeltec_robot)/urdf/mini_akm_robot.urdf"/>
</group>
<group if="$(eval car_mode == 'senior_akm')">
<param name = "robot_description" textfile = "$(find turn_on_wheeltec_robot)/urdf/senior_akm_robot.urdf"/>
</group>
<group if="$(eval car_mode == 'top_akm_bs')">
<param name = "robot_description" textfile = "$(find turn_on_wheeltec_robot)/urdf/top_akm_bs_robot.urdf"/>
</group>
<group if="$(eval car_mode == 'top_akm_dl')">
<param name = "robot_description" textfile = "$(find turn_on_wheeltec_robot)/urdf/top_akm_dl_robot.urdf"/>
</group>
<!--麦轮系列 wxf-->
<group if="$(eval car_mode == 'mini_mec')">
<param name="robot_description" textfile="$(find turn_on_wheeltec_robot)/urdf/mini_mec_robot.urdf"/>
<!-- <param name="robot_name" value="$(arg robot_name)"/> -->
</group>
<group if="$(eval car_mode == 'mini_mec_moveit_four')">
<param name = "robot_description" textfile = "$(find turn_on_wheeltec_robot)/urdf/mini_mec_moveit_four.urdf"/>
</group>
<group if="$(eval car_mode == 'mini_mec_moveit_six')">
<param name = "robot_description" textfile = "$(find turn_on_wheeltec_robot)/urdf/mini_mec_moveit_six.urdf"/>
</group>
<group if="$(eval car_mode == 'senior_mec_bs')">
<param name = "robot_description" textfile = "$(find turn_on_wheeltec_robot)/urdf/senior_mec_robot.urdf"/>
</group>
<group if="$(eval car_mode == 'senior_mec_dl')">
<param name = "robot_description" textfile = "$(find turn_on_wheeltec_robot)/urdf/senior_mec_dl_robot.urdf"/>
</group>
<group if="$(eval car_mode == 'top_mec_bs')">
<param name = "robot_description" textfile = "$(find turn_on_wheeltec_robot)/urdf/top_mec_bs_robot.urdf"/>
</group>
<group if="$(eval car_mode == 'top_mec_dl')">
<param name = "robot_description" textfile = "$(find turn_on_wheeltec_robot)/urdf/top_mec_dl_robot.urdf"/>
</group>
<group if="$(eval car_mode == 'senior_mec_EightDrive' or car_mode == 'top_mec_EightDrive')">
<param name = "robot_description" textfile = "$(find turn_on_wheeltec_robot)/urdf/mec_EightDrive_robot.urdf"/>
</group>
<group if="$(eval car_mode == 'flagship_mec_dl')">
<param name = "robot_description" textfile = "$(find turn_on_wheeltec_robot)/urdf/flagship_mec_dl_robot.urdf"/>
</group>
<group if="$(eval car_mode == 'flagship_mec_bs')">
<param name = "robot_description" textfile = "$(find turn_on_wheeltec_robot)/urdf/flagship_mec_bs_robot.urdf"/>
</group>
<!--全向轮系列 -->
<group if="$(eval car_mode == 'mini_omni')">
<param name = "robot_description" textfile = "$(find turn_on_wheeltec_robot)/urdf/mini_omni_robot.urdf"/>
</group>
<group if="$(eval car_mode == 'senior_omni')">
<param name = "robot_description" textfile = "$(find turn_on_wheeltec_robot)/urdf/senior_omni_robot.urdf"/>
</group>
<group if="$(eval car_mode == 'top_omni')">
<param name = "robot_description" textfile = "$(find turn_on_wheeltec_robot)/urdf/top_omni_robot.urdf"/>
</group>
<!--四驱系列 -->
<group if="$(eval car_mode == 'mini_4wd')">
<param name = "robot_description" textfile = "$(find turn_on_wheeltec_robot)/urdf/mini_4wd_robot.urdf"/>
</group>
<group if="$(eval car_mode == 'mini_4wd_moveit_four')">
<param name = "robot_description" textfile = "$(find turn_on_wheeltec_robot)/urdf/mini_4wd_moveit_four.urdf"/>
</group>
<group if="$(eval car_mode == 'mini_4wd_moveit_six')">
<param name = "robot_description" textfile = "$(find turn_on_wheeltec_robot)/urdf/mini_4wd_moveit_six.urdf"/>
</group>
<group if="$(eval car_mode == 'senior_4wd_bs')">
<param name = "robot_description" textfile = "$(find turn_on_wheeltec_robot)/urdf/senior_4wd_bs_robot.urdf"/>
</group>
<group if="$(eval car_mode == 'senior_4wd_dl')">
<param name = "robot_description" textfile = "$(find turn_on_wheeltec_robot)/urdf/senior_4wd_dl_robot.urdf"/>
</group>
<group if="$(eval car_mode == 'top_4wd_bs')">
<param name = "robot_description" textfile = "$(find turn_on_wheeltec_robot)/urdf/top_4wd_bs_robot.urdf"/>
</group>
<group if="$(eval car_mode == 'top_4wd_dl')">
<param name = "robot_description" textfile = "$(find turn_on_wheeltec_robot)/urdf/top_4wd_dl_robot.urdf"/>
</group>
<group if="$(eval car_mode == 'flagship_4wd_bs')">
<param name = "robot_description" textfile = "$(find turn_on_wheeltec_robot)/urdf/flagship_4wd_bs_robot.urdf"/>
</group>
<group if="$(eval car_mode == 'flagship_4wd_dl')">
<param name = "robot_description" textfile = "$(find turn_on_wheeltec_robot)/urdf/flagship_4wd_dl_robot.urdf"/>
</group>
<!--差速系列 -->
<group if="$(eval car_mode == 'mini_tank')">
<param name = "robot_description" textfile = "$(find turn_on_wheeltec_robot)/urdf/mini_4wd_robot.urdf"/>
</group>
<group if="$(eval car_mode == 'mini_tank_moveit_four')">
<param name = "robot_description" textfile = "$(find turn_on_wheeltec_robot)/urdf/mini_tank_moveit_four.urdf"/>
</group>
<group if="$(eval car_mode == 'mini_diff')">
<param name = "robot_description" textfile = "$(find turn_on_wheeltec_robot)/urdf/mini_diff_robot.urdf"/>
</group>
<group if="$(eval car_mode == 'senior_diff')">
<param name = "robot_description" textfile = "$(find turn_on_wheeltec_robot)/urdf/senior_diff_robot.urdf"/>
</group>
<group if="$(eval car_mode == 'four_wheel_diff_bs')">
<param name = "robot_description" textfile = "$(find turn_on_wheeltec_robot)/urdf/four_wheel_diff_bs_robot.urdf"/>
</group>
<group if="$(eval car_mode == 'four_wheel_diff_dl')">
<param name = "robot_description" textfile = "$(find turn_on_wheeltec_robot)/urdf/four_wheel_diff_dl_robot.urdf"/>
</group>
<group if="$(eval car_mode == 'flagship_four_wheel_diff_dl')">
<param name = "robot_description" textfile = "$(find turn_on_wheeltec_robot)/urdf/flagship_four_wheel_diff_dl_robot.urdf"/>
</group>
<group if="$(eval car_mode == 'flagship_four_wheel_diff_bs')">
<param name = "robot_description" textfile = "$(find turn_on_wheeltec_robot)/urdf/flagship_four_wheel_diff_bs_robot.urdf"/>
</group>
<group if="$(eval car_mode == 'brushless_senior_diff')">
<param name = "robot_description" textfile = "$(find turn_on_wheeltec_robot)/urdf/brushless_senior_diff.urdf"/>
</group>
<!-- 读取urdf信息(robot_description) 发布话题:/joint_states-->
<node unless="$(eval (car_mode=='mini_mec_moveit_six' or car_mode=='mini_4wd_moveit_six') and if_voice==true)" name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<!-- 订阅话题:/joint_states,发布小车TF信息-->
<node unless="$(eval (car_mode=='mini_mec_moveit_six' or car_mode=='mini_4wd_moveit_six') and if_voice==true)" name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
</launch>
gedit launch/include/robot_pose_ekf.launch<launch>
<arg name="robot_name" default="wheeltec_01" />
<!--选择cartogapher算法时不开启滤波节点-->
<arg name="is_cartographer" default="false"/>
<!-- Robot pose ekf 拓展卡尔曼滤波-->
<node pkg="robot_pose_ekf" type="robot_pose_ekf" name="robot_pose_ekf" output="screen" unless="$(arg is_cartographer)">
<!-- <param name="output_frame" value="odom_combined"/>
<param name="base_footprint_frame" value="base_footprint"/>-->
<!-- wxf s -->
<param name="output_frame" value="$(arg robot_name)/odom_combined"/>
<param name="base_footprint_frame" value="base_footprint"/>
<!-- wxf e -->
<param name="freq" value="30.0"/>
<param name="sensor_timeout" value="2.0"/>
<param name="odom_used" value="true"/>
<param name="imu_used" value="true"/>
<param name="vo_used" value="false"/>
<remap from="imu_data" to="imu" />
</node>
</launch>
rosrun rqt_tf_tree rqt_tf_tree