COLMAP 和 SFM的关系是什么?
COLMAP 和 SFM(Structure-from-Motion)是计算机视觉中用于三维重建的核心技术,二者既有紧密关联,又在功能和应用上存在显著差异。以下是详细对比:
SFM 是一种 计算机视觉技术,旨在从多视角2D图像中恢复场景的3D结构(点云)和相机运动参数(位姿)。其核心思想是通过分析图像间的几何关系,重建三维空间信息。
COLMAP 是一款 开源软件工具,实现了完整的SFM流程,并扩展了多视图立体匹配(MVS)功能,支持从图像到稠密3D模型的全流程重建。
1. 定义与核心功能
对比维度 | COLMAP | SFM(Structure-from-Motion) |
|---|---|---|
本质 | 一款开源的 三维重建软件,实现了完整的SFM和MVS(多视图立体)流程。 | 一种 计算机视觉技术,指从多视角图像中恢复三维结构和相机运动的方法论。 |
功能范围 | 包含SFM的全部功能,并扩展了稠密重建(MVS)、纹理映射、自动化流程等高级模块。 | 仅涵盖稀疏重建(相机位姿+稀疏点云),不涉及稠密重建或纹理生成。 |
实现形式 | 具体工具(C++库+GUI/CLI),提供可执行的算法实现和用户接口。 | 抽象算法框架(如增量式、全局式),需通过代码或工具(如COLMAP、Bundler)实现。 |
2. 技术流程对比
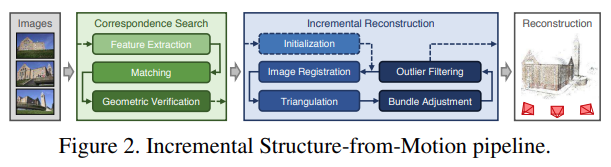
(1) SFM通用流程
SFM作为技术理论,通常包含以下步骤:
特征提取:检测图像中的关键点(如SIFT、ORB)。
特征匹配:跨图像匹配相同场景点。
相机姿态估计:通过对极几何计算相对位姿。
三角测量:生成稀疏3D点云。
光束法平差(BA):优化相机参数和3D点位置。
(2) COLMAP的扩展流程
在SFM基础上,COLMAP增加了:
稠密重建(MVS):通过多视图立体匹配生成稠密点云。
表面重建:将点云转换为网格模型(如泊松重建)。
纹理映射:将图像颜色投影到3D模型表面。
自动化流水线:支持一键式从图像到完整3D模型的全流程处理。
3. 关键区别
特性 | COLMAP | SFM(通用技术) |
|---|---|---|
输出类型 | 稀疏点云 + 稠密点云 + 网格模型 + 纹理 | 仅稀疏点云和相机位姿 |
算法实现 | 集成增量式/全局式SFM,支持GPU加速 | 需自行选择算法(如增量式Theia、全局式OpenMVG) |
适用场景 | 复杂场景(如城市建模)、高精度需求(文化遗产) | 基础研究或简单场景(如实验室物体重建) |
易用性 | 提供GUI和命令行工具,适合非编程用户 | 需编程实现或依赖其他工具链 |
性能优化 | 内置多线程、哈希编码等加速技术 | 性能依赖具体实现(如是否使用BA优化) |
4. 典型应用场景
COLMAP:
影视特效(《曼达洛人》虚拟场景重建)
考古数字化(高精度文物扫描)
自动驾驶(高精地图生成)
SFM(通用):
机器人SLAM(实时定位与建图)
无人机航拍地图(OpenDroneMap)
学术算法研究(新SFM方法验证)
5. 总结
COLMAP是SFM技术的集大成者:它将SFM理论工程化为高效工具,并扩展了稠密重建和纹理生成等实用功能。
SFM是COLMAP的核心:COLMAP的稀疏重建部分完全基于SFM原理,但通过优化(如Ceressolver)提升了精度和速度。