CVPR2025丨遥感领域,全模态与秒超高清遥感建模重大突破,性能提升创新点
关注gongzhonghao【CVPR顶会精选】
刚入门遥感建模时,总好奇别人为什么总能提出新方法?慢慢摸索后才发现,创新点并不是硬憋出来的,而是要从数据特性、传感器差异、地物细节以及环境变化中发现机会。不同波段、不同分辨率、不同时相的数据里,都可能隐藏着提升模型性能的关键。
今天小图就分享3个关于CVPR挖掘遥感建模创新点的思路,让新手也能快速上手,少走弯路,快速找到研究突破口~
论文一:RobSense: A Robust Multi-modal Foundation Model for Remote Sensing with Static, Temporal, and Incomplete Data Adaptability
方法:
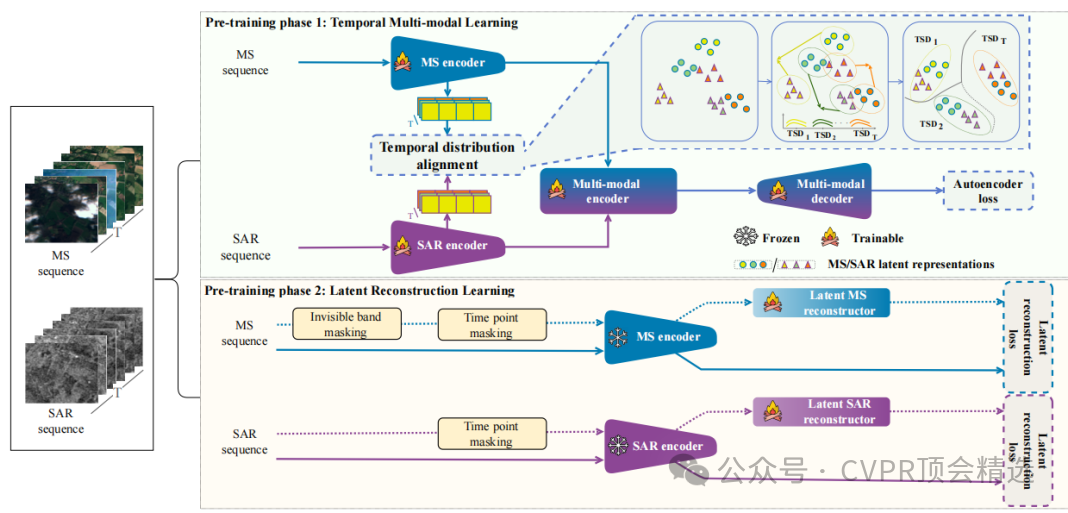
文章首先设计了两个并行的基于Vision Transformer的单模态编码器和一个多模态编码器,以处理多光谱和合成孔径雷达数据。接着,通过时间分布对齐和掩码自编码器策略对模型进行预训练,以增强多模态数据的时间特定表示。最后,通过在大规模数据集上进行预训练,并在多个下游任务上进行微调,验证了模型的性能。
创新点:
提出了RobSense,一个能够支持从静态到时序、从单模态到多模态以及不完整数据的多模态基础模型,极大地提升了模型的适应性。
引入了基于时间分布对齐的时序多模态学习方法,通过多变量Kullback-Leibler散度对齐不同模态的时间序列分布,保留了时间特定的分布信息。
设计了两个单模态潜在重构器,能够从因光谱带变化或时间序列不规则性导致的稀疏表示中恢复丰富的表示,有效应对数据不完整问题。
论文链接:
https://cvpr.thecvf.com/virtual/2025/poster/33916
图灵学术论文辅导
论文二:XLRS-Bench: Could Your Multimodal LLMs Understand Extremely Large Ultra-High-Resolution Remote Sensing Imagery?
方法:
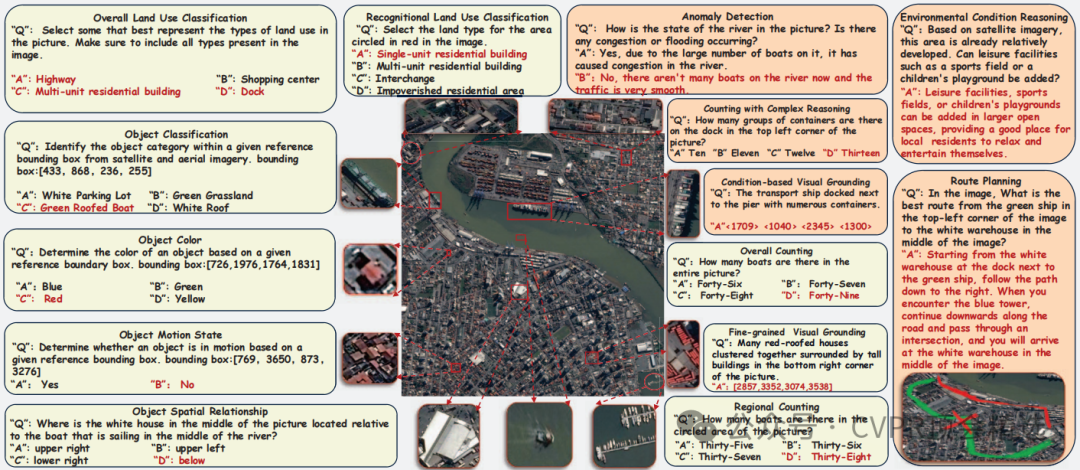
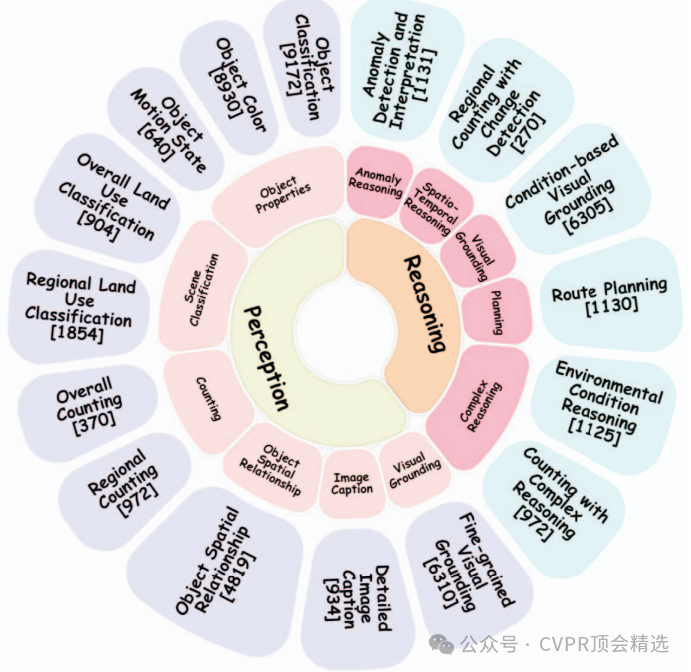
文章首先收集了1400张真实世界的超高分辨率遥感图像,涵盖检测、分割和变化检测等多种下游任务数据。接着,通过45位专家进行手工标注和交叉验证,生成了涵盖10个感知指标和6个推理维度的45942个标注。最后,基于XLRS-Bench对多种通用和遥感领域特定的MLLMs进行了深入评估,揭示了现有模型在超高分辨率遥感影像理解中的局限性,并为未来的研究方向提供了重要参考
创新点:
XLRS-Bench拥有目前的平均图像尺寸,为评估模型在真实世界遥感场景中的长距离空间语义认知能力提供了独特视角。
该基准测试涵盖了16个子任务,促进模型在真实世界决策和时空变化捕捉中的应用。
采用半自动化流程结合人工验证的方式生成高质量标注,确保了标注的准确性和可靠性,极大地提升了基准测试的适用性和实用性。
论文链接:
https://cvpr.thecvf.com/virtual/2025/poster/35068
图灵学术论文辅导
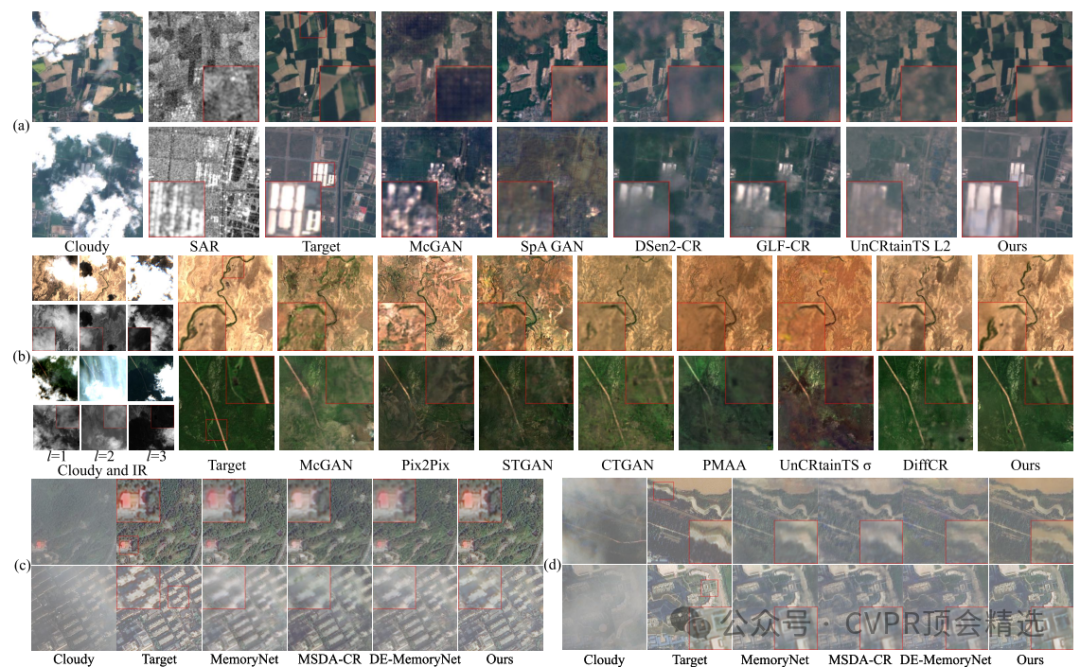
论文三:Effective Cloud Removal for Remote Sensing Images by an Improved Mean-Reverting Denoising Model with Elucidated Design Space
方法:
文章首先通过重新构建均值回归扩散模型的前向过程和基于常微分方程的后向过程,构建了一个新的扩散过程,将目标图像与云层图像直接联系起来。接着,通过引入预处理技术,使模型能够根据噪声水平自适应地调整输入和输出,从而提高了模型的稳定性和有效性。最后,为了实现多时相云层去除,文章设计了一个新的网络架构,能够并行处理序列图像,并通过时间融合自注意力机制有效地整合时间信息,进一步提升了模型在多时相数据上的表现。
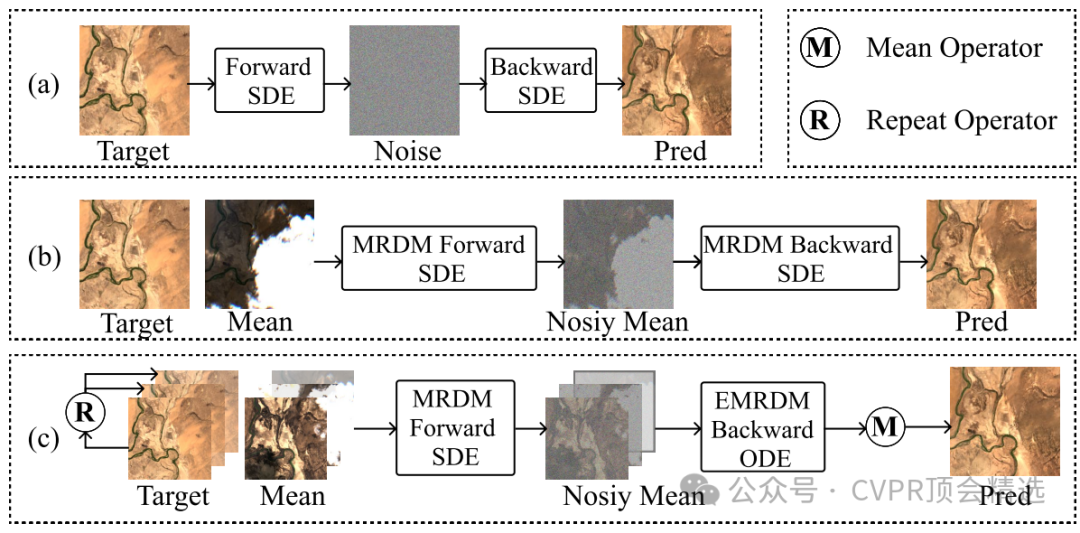
创新点:
EMRDM提供了一个模块化框架,具有可更新的模块和清晰的设计空间,这使得模型能够灵活地适应不同的任务需求。
该模型通过重新设计关键模块,优化训练过程,以及引入确定性和随机采样器来改进采样过程,从而显著提升了云层去除的性能。
文章进一步开发了一个能够同时对序列图像进行去噪的网络,能够更好地利用多时相信息。
论文链接:
https://cvpr.thecvf.com/virtual/2025/poster/33230
本文选自gongzhonghao【CVPR顶会精选】