武大智能与集成导航小组!i2Nav-Robot:用于的室内外机器人导航与建图的大规模多传感器融合数据集
- 作者:Hailiang Tang1,2,3^{1,2,3}1,2,3, Tisheng Zhang1,2,3^{1,2,3}1,2,3, Liqiang Wang1^{1}1, Xin Ding1^{1}1, Man Yuan1^{1}1, Zhiyu Xiang1^{1}1, Jujin Chen1^{1}1, Yuhan Bian1^{1}1, Shuangyan Liu1^{1}1, Yuqing Wang1^{1}1, Guan Wang1^{1}1, Xiaoji Niu1,2,3^{1,2,3}1,2,3
- 单位:1^{1}1武汉大学GNSS研究中心智能与集成导航小组,2^{2}2湖北时空信息与定位导航技术创新中心,3^{3}3湖北珞珈实验室
- 论文标题:i2Nav-Robot: A Large-Scale Indoor-Outdoor Robot Dataset for Multi-Sensor Fusion Navigation and Mapping
- 论文链接:https://arxiv.org/pdf/2508.11485
- 代码链接:https://github.com/i2Nav-WHU/i2Nav-Robot
主要贡献
- 多模态传感器集成:在全向轮式机器人上集成了包括前视固态激光雷达、360度固态激光雷达、4D毫米波雷达、立体相机、全球导航卫星系统(GNSS)接收器、惯性测量单元(IMU)和轮式里程计在内的多种传感器,为精确导航和制图提供了全面的运动感知能力。
- 精确时间同步:采用基于硬件触发和精确时间协议(PTP)的混合时间同步方法,为几乎所有传感器提供了微秒级精度的时间戳,确保了数据集的高质量。
- 大规模数据序列:收集了十个大规模序列,总长度超过17000米,涵盖了户外街道、室内停车场和室内外建筑等多种环境,这些环境都是商业UGV的潜在应用场景。
- 高精度真值数据:采用高精度IMU提供高频位置、姿态和速度真值数据。通过后处理GNSS/INS集成方法为户外序列提供厘米级真值,通过后处理地图匹配(MM)/INS集成方法为GNSS挑战序列提供真值。
- 数据集验证:使用十个开源的里程计和基于GNSS的系统对数据集进行了验证,结果表明数据集具有卓越的数据质量和良好的传感器同步性,提供的校准参数非常准确。
研究背景
- UGV导航的重要性:UGV在物流、清洁和巡逻等自主应用中被广泛使用,准确可靠的位置和姿态对于UGV的自主应用至关重要。
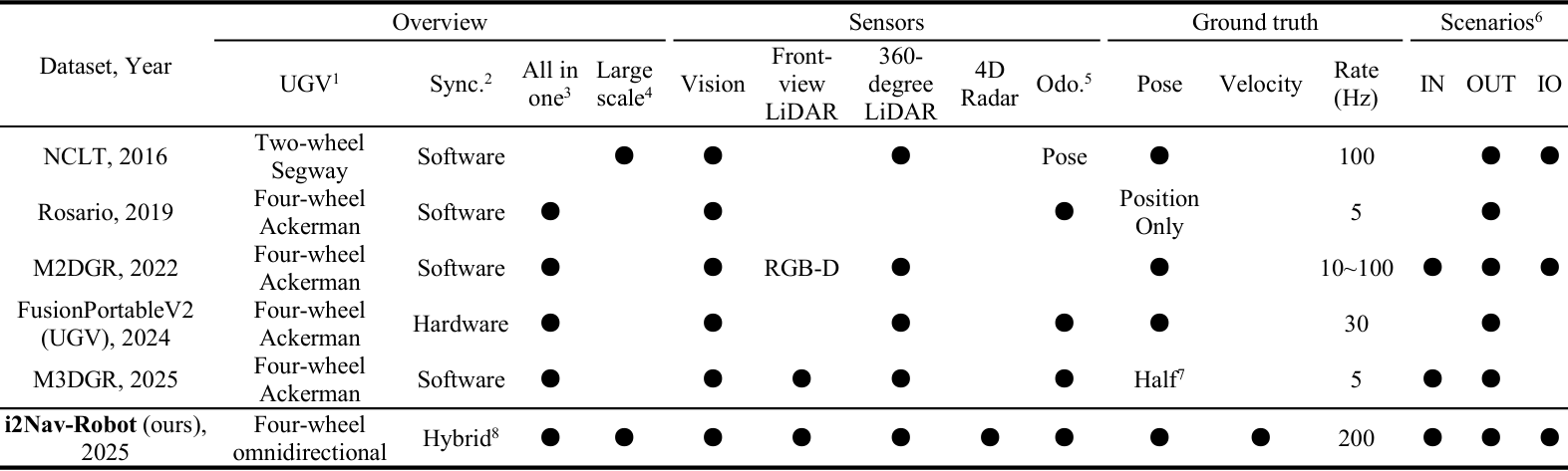
- 现有数据集的局限性:当前的UGV数据集在传感器配置、时间同步、真值数据和场景多样性方面存在不足,无法满足现代导航和制图方法的需求。例如,一些数据集缺少GNSS接收器、固态激光雷达或4D毫米波雷达等传感器,或者时间同步不准确,真值数据精度不够或覆盖范围有限。
系统概述
本节详细介绍了i2Nav-Robot数据集中使用的多传感器机器人系统,包括传感器配置、时间同步和校准方法。
传感器配置
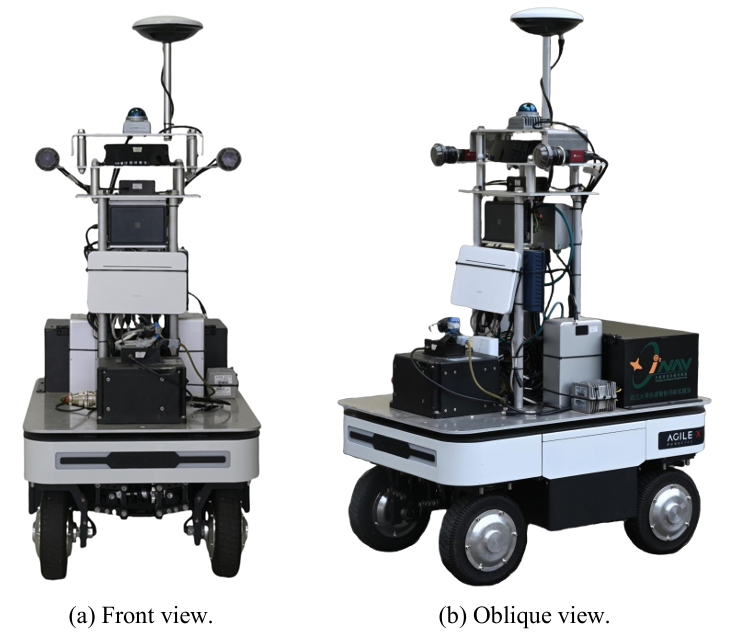
机器人平台
基于四轮全向机器人AgileX Ranger Mini3构建,配备NVIDIA Jetson AGX Orin板用于数据采集,通过ROS(机器人操作系统)进行数据管理。
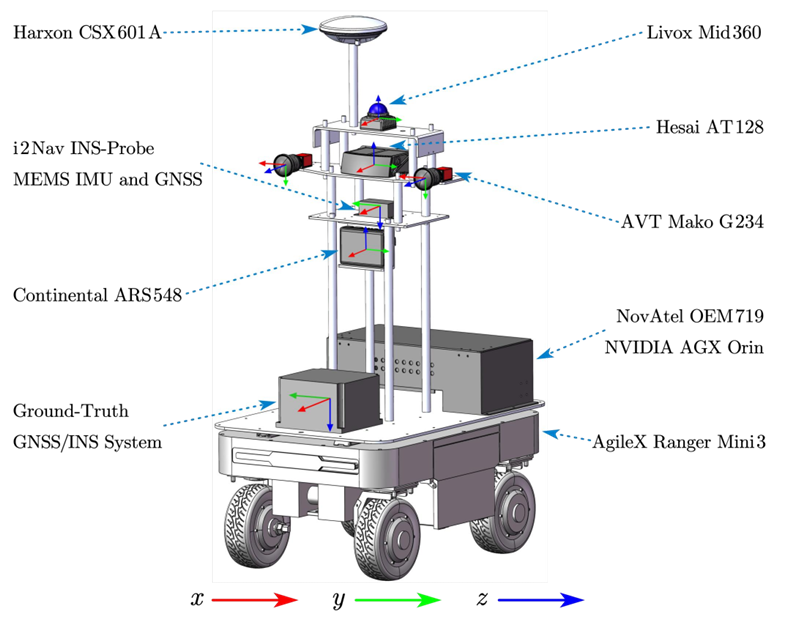
传感器集成
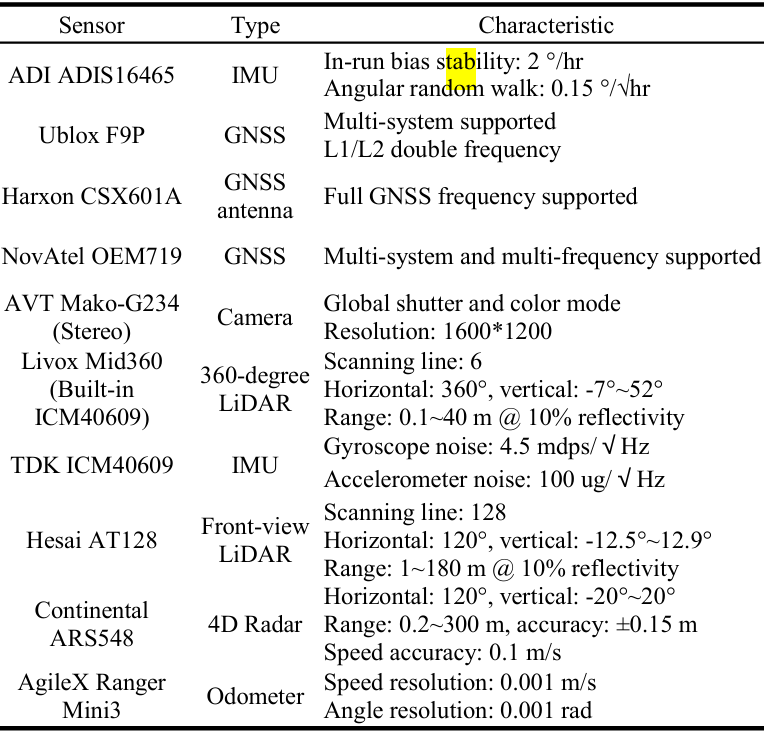
- 里程计(ODO):AgileX Ranger Mini3底盘通过CAN总线提供四个轮子的速度和角度数据。
- GNSS/INS集成系统:INS-Probe(包含ADI ADIS16465 IMU和Ublox F9P GNSS接收器)和NovAtel OEM719接收器用于提供GNSS-RTK定位结果和原始观测数据。
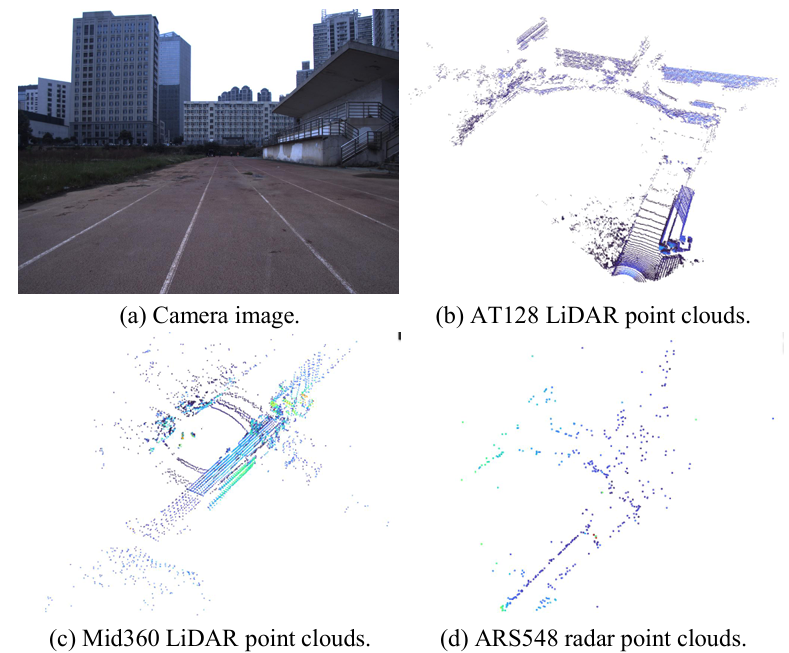
- 多模态感知传感器:
- 立体相机:AVT Mako-G234,具有全局快门和彩色模式,分辨率为1600×1200。
- 前视固态激光雷达:Hesai AT128,水平视场角120°,垂直视场角25°,测量范围1~180米(10%反射率)。
- 360度固态激光雷达:Livox Mid360,水平视场角360°,垂直视场角-7°52°,测量范围0.140米(10%反射率)。
- 4D毫米波雷达:Continental ARS548,水平视场角120°,垂直视场角-20°20°,测量范围0.2300米,精度±0.15米,速度精度0.1米/秒。
时间同步
- 时间同步架构:以GNSS作为时间源,通过硬件触发和PTP(精确时间协议)实现传感器的时间同步。
- 硬件同步:GNSS、INS-Probe和Cool Shark时间同步箱通过硬件触发和PTP同步,确保微秒级精度的时间戳。
- 软件同步:4D雷达和里程计通过软件同步,接收数据时的时间戳由Orin系统时间提供。通过离线校准固定时间偏移,补偿软件同步的不准确性。
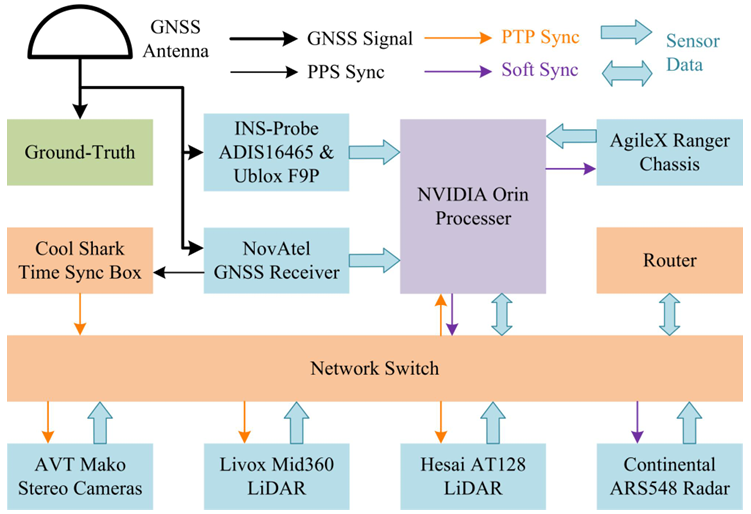
- 时间同步精度:通过硬件同步的传感器(如相机、激光雷达)可实现微秒级时间同步精度。软件同步的雷达和里程计经过校准后,时间同步精度可达1ms。
校准
- 内参和外参校准:
- 立体相机:使用MATLAB和AprilTag校准板对立体相机进行内参和外参校准,采用针孔相机和径向切向畸变模型。
- 传感器外参:其他传感器的外参通过3D模型直接获得,未校准旋转部分的外参,但提供了通过开源算法FF-LINS和LE-VINS估计的激光雷达-IMU和相机-IMU外参。
- 时间偏移校准:
- 速度估计:通过计算轮速和雷达速度的时间序列,并与真值速度序列进行互相关分析,估计时间偏移。
- 校准结果:里程计的时间偏移约为-10ms,雷达的时间偏移约为-100ms。校准后,雷达和里程计的速度与真值速度同步,时间同步精度优于1ms。
真值系统
本节介绍了i2Nav-Robot数据集中用于生成高精度真值数据的系统和方法,主要包括GNSS/INS集成和MM/INS集成两种方式。
GNSS/INS集成
- 数据来源:使用NovAtel OEM719接收器收集的GNSS原始观测数据(包括伪距、载波相位和多普勒)以及来自地面真值系统的IMU数据。
- 处理软件:采用NovAtel的商业软件Inertial Explorer (IE)进行后处理,生成高精度的地面真值位置、姿态和速度。
- 精度:通过IE软件的组合解算,得到平滑且高精度的真值数据,适用于GNSS信号良好的场景。
MM/INS集成
- 适用场景:在GNSS信号受限的环境中,如城市峡谷或室内停车场,GNSS/INS集成可能不可靠,因此采用基于地图匹配(MM)的方法来生成高精度真值。
- 地图构建:使用商业激光雷达SLAM系统(如GoSLAM的RS100i-MT)在建筑物和停车场场景中构建大规模点云地图,并通过几个RTK控制点将地图对齐到大地坐标系。
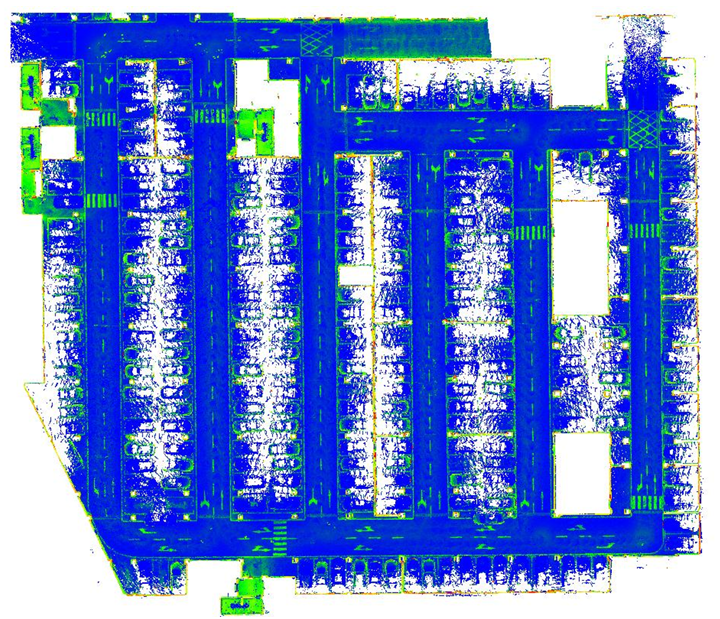
- 真值生成:
- 首先,利用多传感器融合方法结合AT128激光雷达的MM约束条件,获得粗略的位置结果和无畸变的点云。
- 然后,通过优化方法利用AT128激光雷达的点云和预构建的点云地图,生成独立的MM结果。
- 最后,将MM位置与导航级IMU数据通过自开发的后处理软件进行集成,即使在GNSS受限的场景中,也能获得厘米级精度的地面真值位置。
数据集描述
序列特征
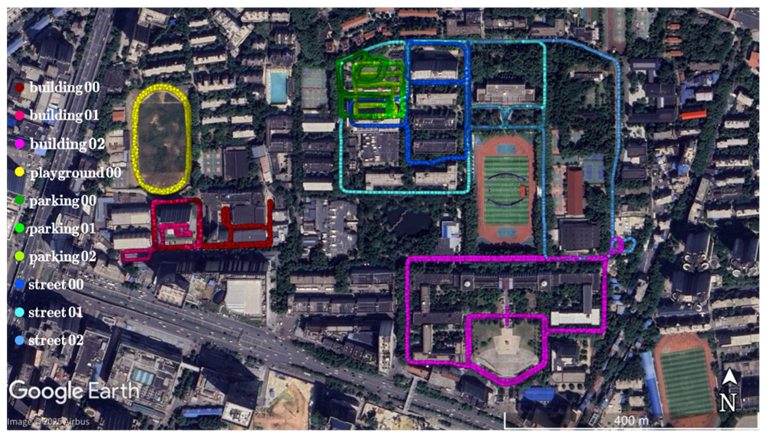
- 数据收集环境:数据在武汉大学校园内收集,涵盖了商业物流和清洁UGV的典型应用场景,包括建筑物、操场、停车场和街道。
- 序列数量和长度:共收集了十个序列,总时长为14204秒,总长度为17060米。
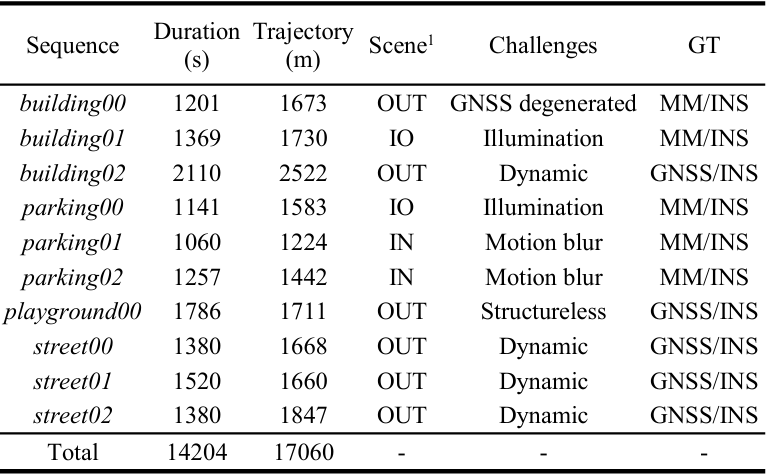
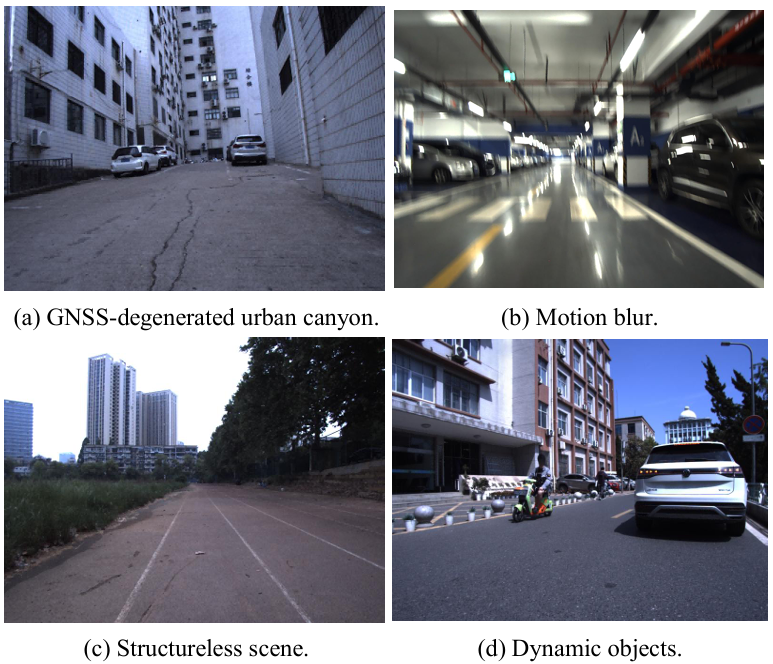
- 场景多样性:序列包括室内、室外和室内外混合场景,提供了对多传感器融合导航方法的挑战。
- 真值生成方法:对于GNSS信号良好的序列,采用GNSS/INS集成生成真值;对于GNSS受限的序列,采用MM/INS集成生成真值。
数据格式
- ROS Bag文件:所有序列均提供完整的ROS Bag文件,包含传感器数据和真值数据,方便用户直接使用。
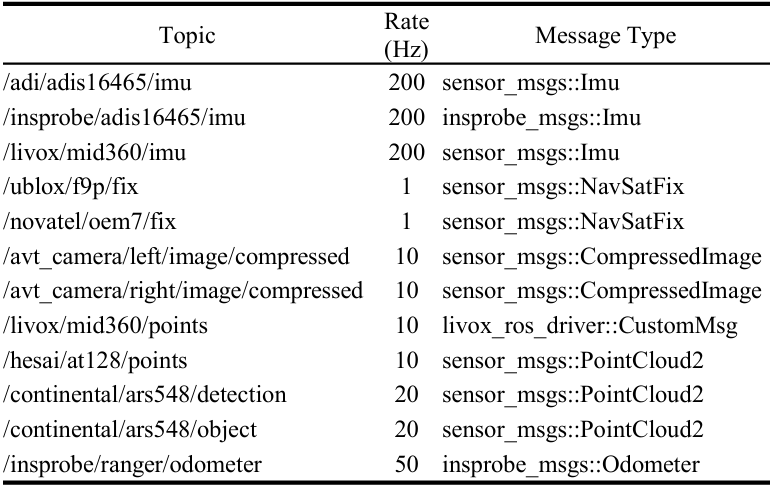
- 主题信息:表IV列出了ROS Bag文件中的主题信息,包括主题名称、帧率和消息类型。例如,IMU数据的频率为200Hz,GNSS数据的频率为1Hz,立体相机图像的频率为10Hz等。
- 原始数据文件:还提供了IMU、GNSS和里程计数据的原始文本文件,适用于GNSS/INS集成等应用。
- 真值文件:包含两种类型的真值文件,一种是高频率的位置、姿态和速度数据(*.nav文件),另一种是位置和姿态四元数数据(*.trajectory.csv文件)。
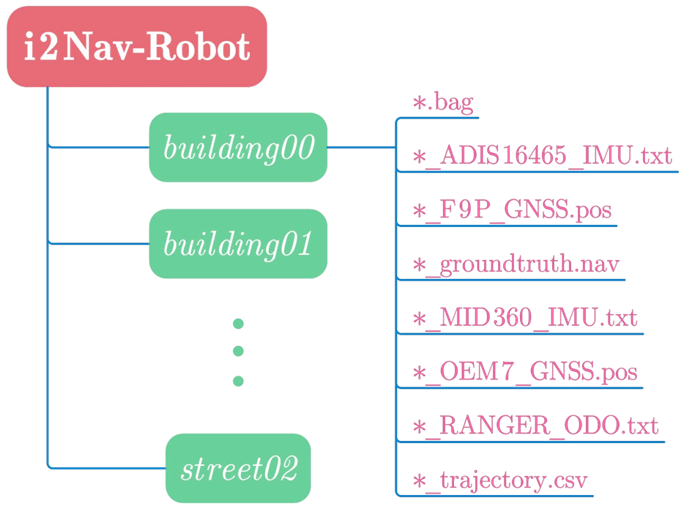
- 数据组织:每个序列的目录包含六个或八个文件,文件名以序列名称开头,如*.bag、*.nav和*.csv等。室内序列不包含GNSS文件。
实验
里程计系统评估
- 实验目的:评估在GNSS受限环境中UGV导航精度的关键因素——里程计系统的性能。
- 传感器选择:使用左相机、ADIS16465 IMU和AT128激光雷达进行实验。
- 评估方法:
- 评估系统:包括三种视觉惯性里程计(VIO)系统(VINS-Mono、OpenVINS、DM-VIO),三种激光雷达惯性里程计(LIO)系统(DLIO、FF-LINS、FAST-LIO2),以及三种激光雷达视觉惯性里程计(LVIO)系统(FAST-LIVO2、LE-VINS、R3LIVE)。
- 评估指标:使用evo工具计算绝对旋转误差(ARE)和绝对平移误差(ATE)。
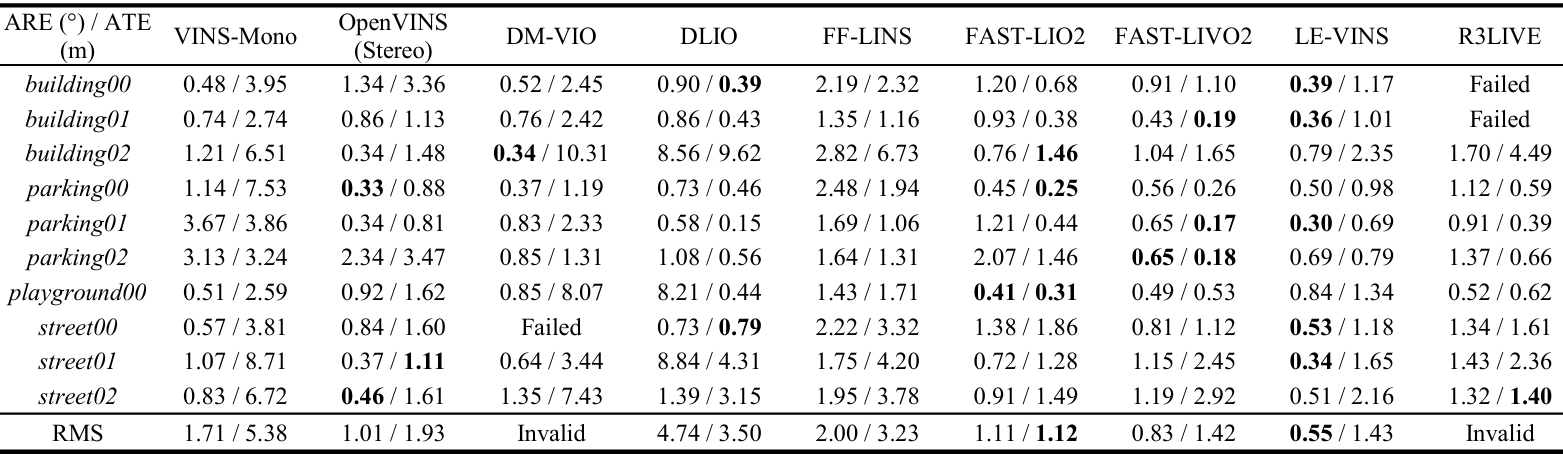
- 实验结果:
- 结果展示:FAST-LIO2在均方根误差(RMS)方面表现最佳,表明其在数据集上的配置正确且性能优秀。
- 系统表现:OpenVINS、FAST-LIO2和FAST-LIVO2在不同序列上表现最佳,而DM-VIO和R3LIVE在某些序列上未能运行,进一步证明了数据集的高质量和挑战性。
基于GNSS的系统评估
- 实验目的:评估GNSS在大规模环境中实现准确导航和制图的关键作用。
- 评估系统:包括KF-GINS、OB-GINS、VINS-Fusion和IC-GVINS四种系统。
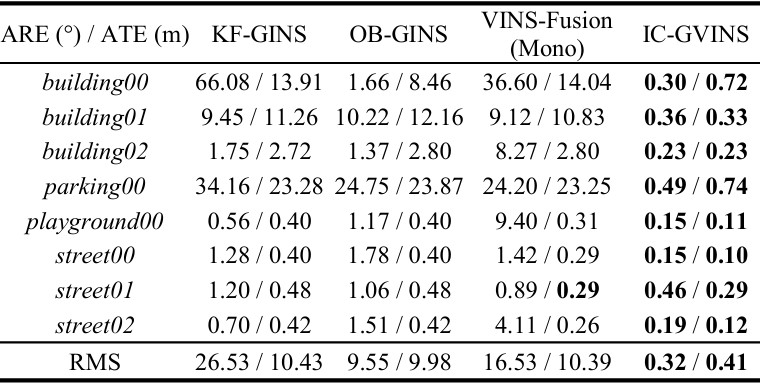
- 实验结果:
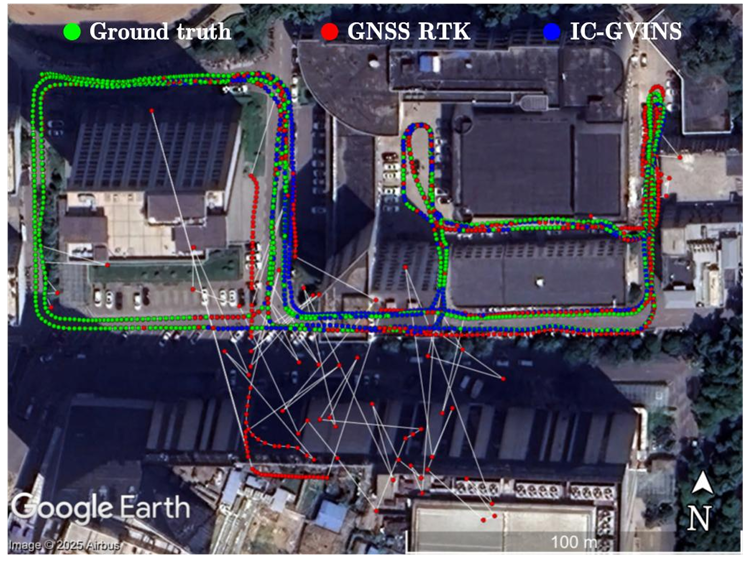
- GNSS退化序列:在building00序列中,实时RTK结果出现错误固定位置的情况,但IC-GVINS仍能实现亚米级定位精度,因为其采用了有效的RTK异常值剔除方法。
- 精度表现:IC-GVINS在playground00、street00和street02序列中表现出色,ATE约为0.1米,表明数据集的真值精度较高。
- 实时RTK与后处理真值:实验中使用OEM719接收器的实时RTK结果,而数据集的真值是通过后处理的紧密耦合GNSS/INS集成方法生成的,精度远高于实时RTK结果。
同步评估
- 实验目的:验证多传感器融合导航或制图系统中传感器之间的空间时间同步精度。
- 评估方法:
- 相机-IMU同步:使用LE-VINS在线估计的外参和时间延迟参数来评估相机-IMU同步。
- 激光雷达-IMU同步:使用FF-LINS估计的外参和时间延迟参数来评估激光雷达-IMU同步。
- 相机-IMU同步:
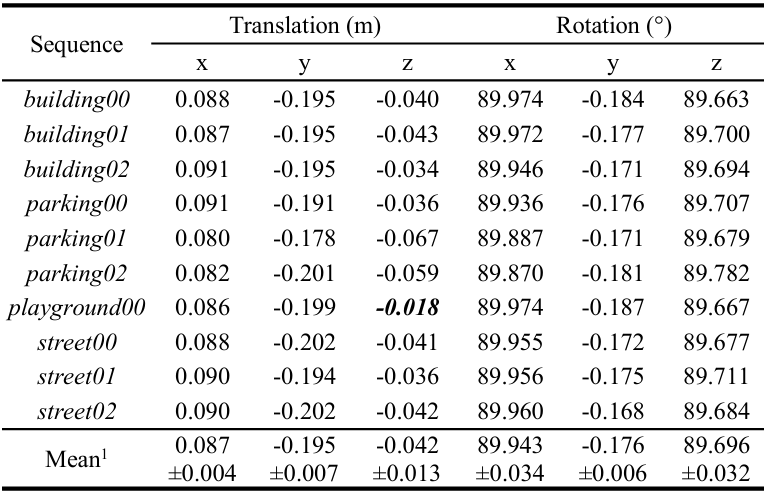
- 外参估计:估计的外参与机械结构测量值接近,平均值为(0.087, -0.195, -0.042),精度优于2厘米。
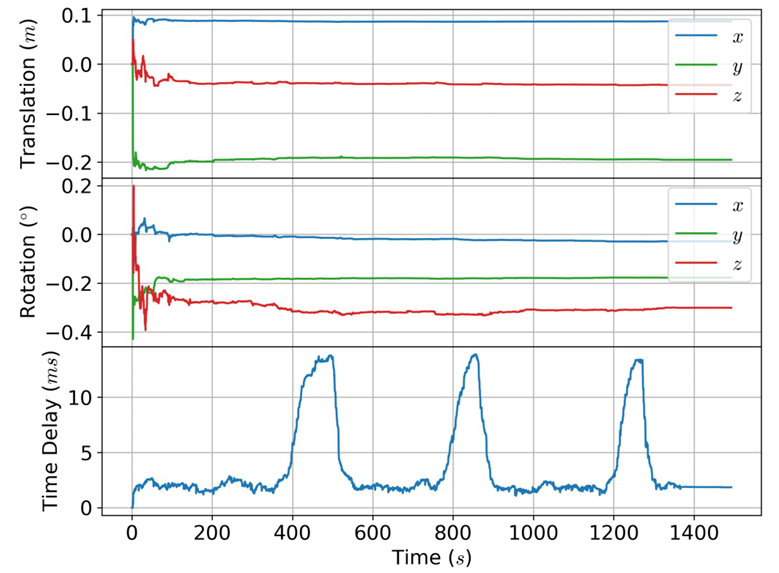
- 时间延迟估计:图12展示了在室内外序列building01上LE-VINS估计的相机-IMU时间延迟参数。在室内环境中,估计的时间延迟约为15ms(相机曝光时间的一半),在室外环境中约为2ms,表明相机和IMU的时间同步精度优于1ms。
- 激光雷达-IMU同步:
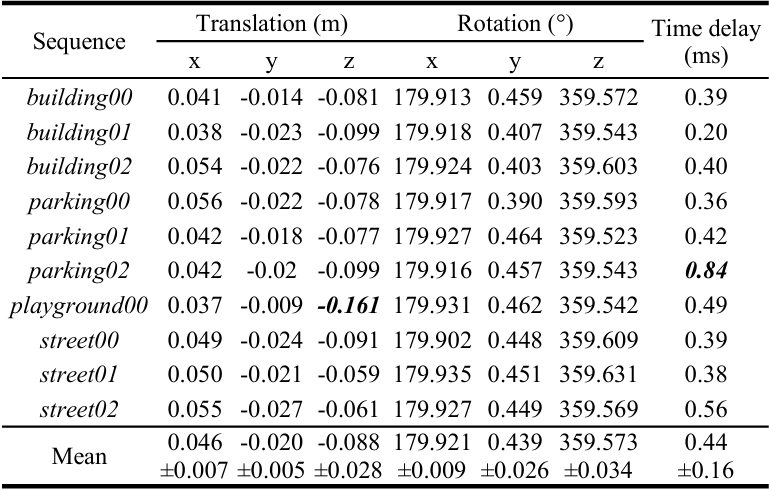
- 外参估计:估计的外参精度高,时间延迟参数平均值约为0.44ms,表明激光雷达和IMU的时间同步精度约为1ms。
- 异常值分析:在parking02序列上,由于晶体振荡器漂移,时间延迟参数出现较大偏差,但总体上激光雷达-IMU同步精度仍然很高。
结论与未来工作
- 结论:
- i2Nav-Robot数据集是一个大规模的室内外UGV数据集,涵盖了多种传感器和场景,提供了高精度的真值数据和良好的传感器同步性,适用于UGV的自主导航、SLAM和多传感器融合导航等应用。
- 未来工作:
- 进一步探索i2Nav-Robot数据集在大规模制图中的潜力,因为构建实用的高精度地图已成为商业UGV的基本能力之一。
