【图像算法 - 18】慧眼辨良莠:基于深度学习与OpenCV的麦田杂草智能识别检测系统(附完整代码)
摘要: 传统农田杂草识别依赖人工,耗时耗力且效率低下。本文将带您构建一套基于深度学习(以YOLO12为例)与OpenCV的麦田杂草智能识别系统。我们将详细介绍从数据采集、模型训练到推理部署的完整流程,实现对杂草(如稗草、狗尾草、荠菜等)的精准识别与定位,助力智慧农业发展,提升农田管理效率!
关键词: 深度学习, 杂草识别, 麦田管理, YOLO12, OpenCV, 计算机视觉, 智慧农业, 目标检测, Python, 多目标跟踪
【图像算法 - 18】慧眼辨良莠:基于深度学习与OpenCV的麦田杂草智能识别检测系统
1. 引言:AI赋能精准农业,让杂草无处藏身
在现代农业中,杂草是影响作物生长、降低产量的重要因素之一。传统的杂草防治方法主要依赖人工巡查和广谱除草剂喷洒,不仅成本高昂,而且容易造成农药滥用、环境污染和作物损伤。
随着人工智能技术的飞速发展,基于深度学习的图像识别技术为精准农业提供了全新的解决方案。通过训练AI模型自动识别农田中的杂草种类和位置,可以实现精准施药或机械除草,大幅减少农药使用量,保护生态环境,同时降低生产成本。
本文将聚焦于麦田场景,利用先进的YOLO12目标检测模型,结合OpenCV的强大图像处理能力,构建一个高效、准确的麦田杂草智能识别系统。我们的目标是让机器“看懂”农田,精准区分小麦与杂草,为智慧农业提供核心技术支持。
2. 技术选型:深度学习 + OpenCV 的强强联合
- 深度学习模型 (YOLO12):
- 高效实时: YOLO系列以其卓越的实时检测性能著称。YOLO12作为其最新迭代版本,在保持高速推理的同时,进一步提升了检测精度,非常适合无人机航拍或地面机器人巡查的实时场景。
- 高精度识别: 采用更先进的网络架构和训练策略,能够精准识别小麦与多种常见杂草,即使在复杂背景(如土壤、石块)或光照变化下也能保持稳定表现。
- 端到端训练: 简化了模型开发流程,从原始图像直接输出检测框和类别,易于集成与部署。
- OpenCV (Open Source Computer Vision Library):
- 图像预处理专家: 负责图像的读取、缩放、色彩空间转换(如BGR转RGB)、去噪、增强等,为深度学习模型提供高质量的输入。
- 结果可视化大师: 将模型输出的检测框、类别标签和置信度,以直观的彩色矩形框和文字形式叠加回原图,便于结果展示与分析。
- 后处理引擎: 可用于实现更复杂的逻辑,如计算杂草密度、生成喷药路径、控制除草机器人等。
- 跨平台集成枢纽: 作为连接AI模型与无人机、农业机器人或用户界面的桥梁。
YOLO系列介绍
【图像算法 - 03】YOLO11/YOLO12/YOLOv10/YOLOv8 完全指南:从理论到代码实战,新手入门必看教程(文末有视频介绍)
OpenCV介绍
【图像算法 - 12】OpenCV-Python 入门指南:图像视频处理与可视化(代码实战 + 视频教程 + 人脸识别项目讲解)
边缘端部署参考:
【图像算法 - 05】RK3588 部署实战:YOLO11/YOLOv8(det/seg/pose/obb) 毫秒级推理入门(理论精讲 + 代码落地,新手零门槛上手)
【图像算法 - 04】Jetson 部署必看:YOLOv8/YOLOv10/YOLO11/YOLO12 毫秒级推理全指南(理论 + 代码实战,新手入门零门槛教程)
3. 数据准备:构建高质量的麦田图像数据集
“Garbage in, garbage out.” 模型的性能很大程度上取决于训练数据的质量。我们构建了一个专门用于麦田杂草识别的数据集。

3.1 数据采集
-
来源: 使用无人机或手持相机在不同生长阶段(苗期、拔节期、抽穗期)的麦田中采集图像。
-
多样性: 包含不同天气条件(晴天、阴天)、不同光照(上午、中午、下午)、不同土壤类型和不同杂草密度的场景。
-
目标类别:
- 杂草 (Weeds): 定义具体种类,如
Barnyard_grass(稗草),Green_foxtail(狗尾草),Shepherd's_purse(荠菜) 等。初期可将所有杂草合并为一个Weed类。
- 杂草 (Weeds): 定义具体种类,如
-
数量: 收集了2486张高质量航拍或地面图像,确保各类样本充足(其中,训练集:1661,测试集:245,验证集:580)。
3.2 数据标注
labelme数据标注保姆级教程:从安装到格式转换全流程,附常见问题避坑指南(含视频讲解)
-
工具: 使用 Labelme、CVAT 或 Roboflow 等开源标注工具。
-
方法: 采用 矩形框 (Bounding Box) 标注。为图像中的每株小麦植株或杂草植株绘制边界框。
-
类别定义:
names:1: grass -
格式: 保存为 YOLO 格式的
.txt文件(每行:class_id center_x center_y width height,坐标已归一化)。
3.3 数据集划分
-
按 7:2:1 的比例划分为 训练集 (train)、验证集 (val) 和 测试集 (test)。
-
创建数据配置文件
# weeds.yaml path: /path/to/wheat/weed/dataset train: images/train val: images/val test: images/testnames:0: grass
4. 模型训练:用深度学习“学习”辨识杂草
利用Ultralytics YOLO的API,训练过程变得异常简单。
4.1 环境准备
【图像算法 - 01】保姆级深度学习环境搭建入门指南:硬件选型 + CUDA/cuDNN/Miniconda/PyTorch/Pycharm 安装全流程(附版本匹配秘籍+文末有视频讲解)
4.2 开始训练
使用命令行启动训练:
yolo train \model=yolo12n.pt \ # 选择YOLO12n模型data=weeds.yaml \ # 指向数据配置文件epochs=120 \ # 训练轮数imgsz=640 \ # 输入图像尺寸batch=16 \ # 批次大小device=0 \ # 使用GPUname=wheat_weed_yolo12m_v1 \ # 训练任务名称patience=20 \ # 早停轮数lr0=0.01 \ # 初始学习率optimizer=AdamW \ # 优化器cos_lr=True # 余弦退火学习率
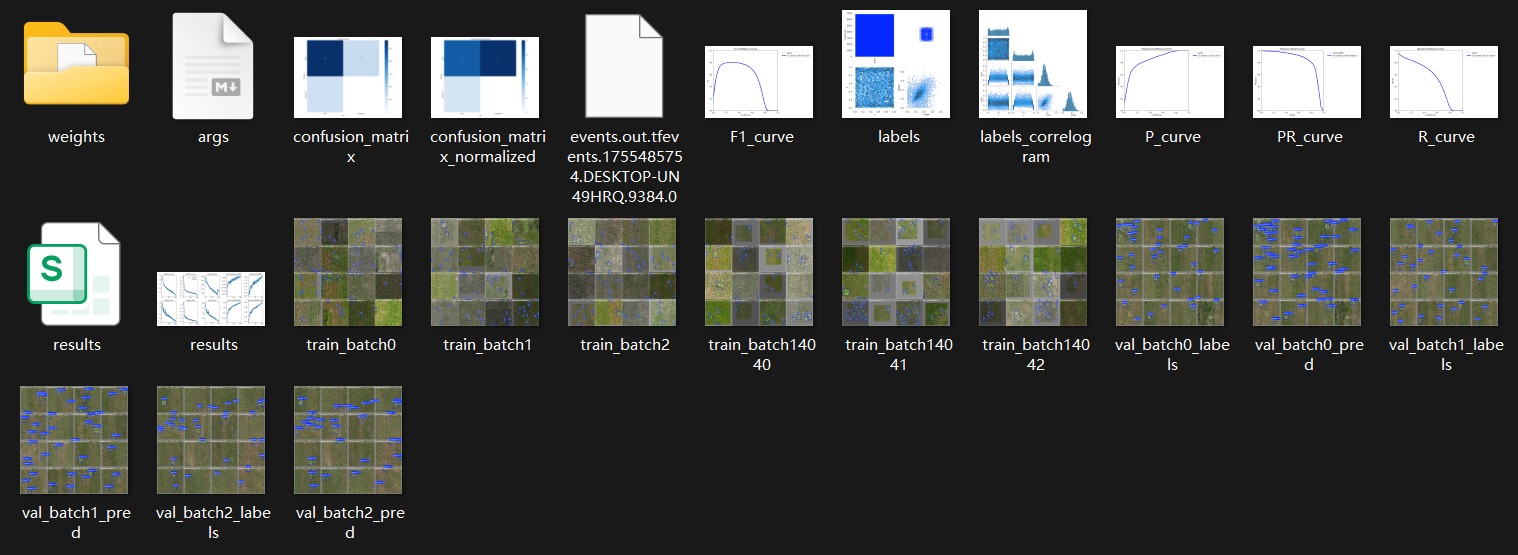
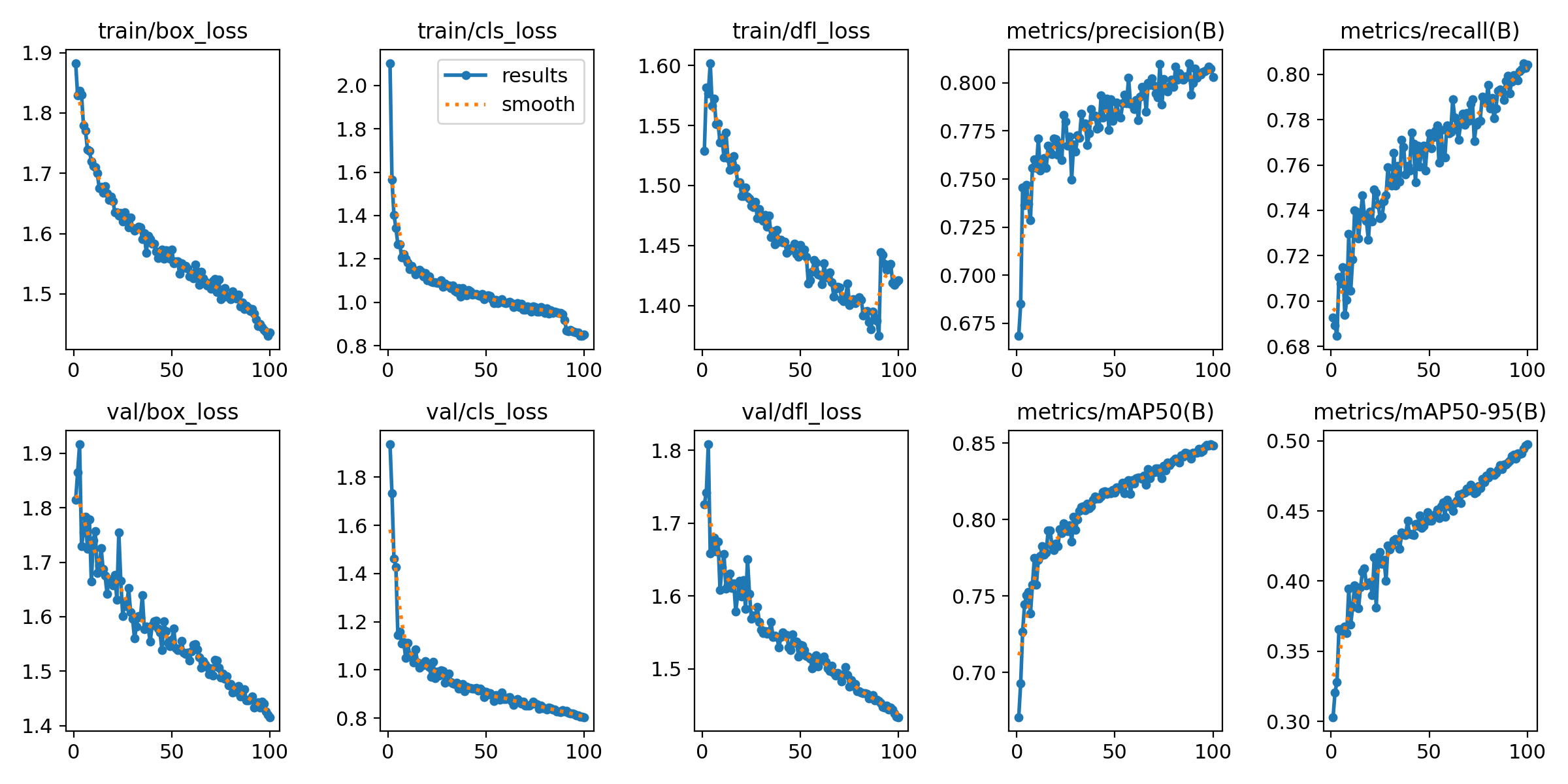
4.3 监控与评估
-
训练过程中,Ultralytics会自动生成训练指标和可视化结果。
-
训练结束后,使用测试集评估最终性能:
-
评估结果将给出 mAP@0.5 等关键指标。
5. 推理与可视化:OpenCV展现AI慧眼
训练好的模型 (best.pt) 可用于实际检测。
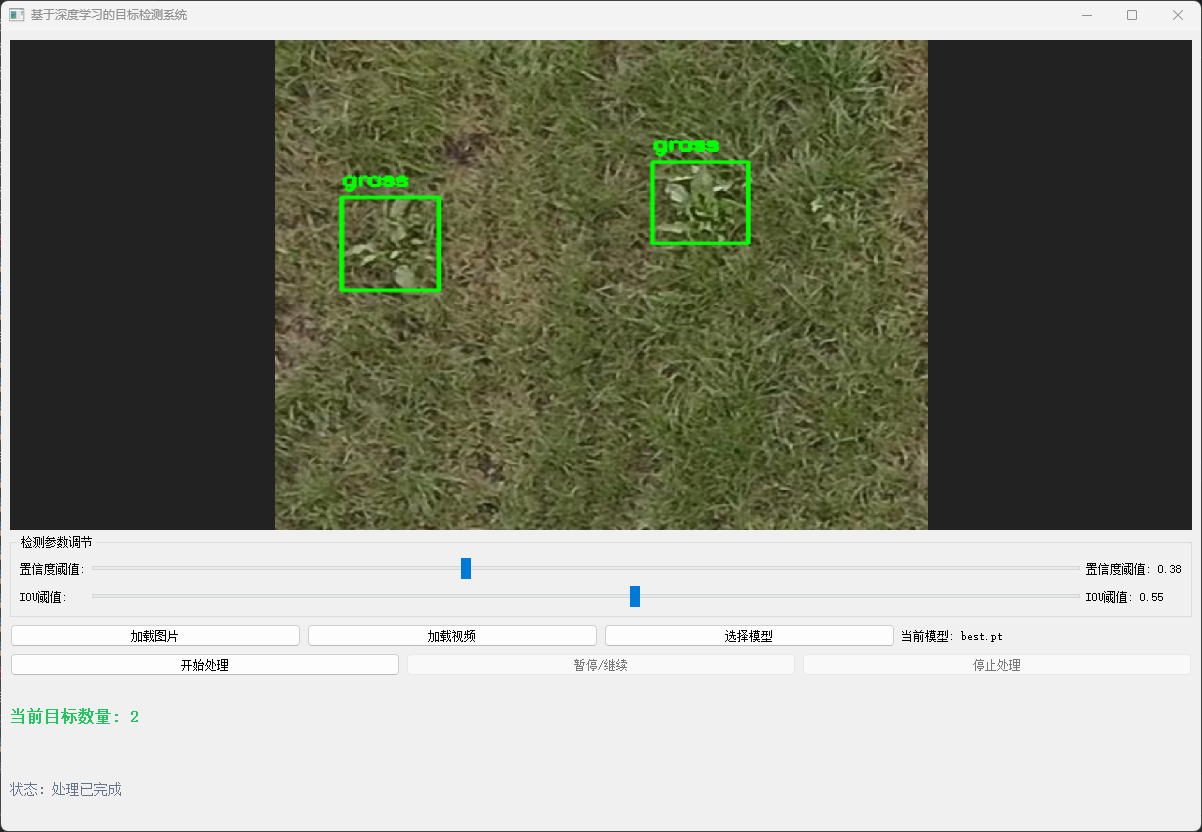
6. 代码详解
- 模型加载与预测: 与苹果检测类似,核心是加载训练好的YOLO12模型并进行预测。
- 类别与颜色: 根据麦田场景定义了小麦和多种杂草的类别,并赋予不同颜色以便区分。
- 结果分析: 可统计不同种类杂草的数量和分布,为农田管理决策提供数据支持。
7. 应用场景与展望
- 无人机巡查: 无人机航拍麦田,AI自动识别杂草分布,生成热力图。
- 精准施药: 根据识别结果,控制喷药设备只在杂草区域精准喷洒除草剂,节约成本,减少污染。
- 智能除草机器人: 部署地面机器人,结合识别结果进行机械除草,实现无化学农药耕作。
- 农田健康监测: 长期跟踪杂草变化,评估防治效果,优化种植策略。
- 未来方向: 结合多光谱或高光谱成像技术,提升识别精度;利用实例分割(YOLO12-seg)精确描绘植株轮廓;部署到边缘计算设备实现田间实时处理。
感谢阅读! 如果您对智慧农业或AI视觉应用感兴趣,希望本文能为您提供有价值的参考。请点赞、收藏、分享,并关注我的CSDN博客,共同探索科技如何改变传统农业!