实现FPS武器的瞄准放大效果(UGUI实现反向遮罩,全屏遮挡,局部镂空效果)
目录
基本概念与原理
技术实现方式
主要应用场景
不同类型FPS中的变体
进阶技巧
平衡性考量
硬件支持
最终效果
新增两个材质
配置对应材质
瞄准镜的纹理效果
代码控制瞄准开镜放大效果
效果
基本概念与原理
开镜放大(Aiming Down Sight,简称ADS)是第一人称射击游戏(FPS)中的核心机制之一。当玩家按下特定按键(通常是鼠标右键)时,游戏视角会模拟真实武器瞄准的动作,将武器抬高到瞄准位置,同时放大视野以增强精确度。
技术实现方式
- 视野缩放:通过动态调整FOV(Field of View)实现,典型值从基础FOV 90°缩小到60°左右
- 武器动画:包括上抬武器、调整持枪姿势等视觉反馈
- 物理模拟:真实武器系统的后坐力、晃动等物理特性
- 性能影响:开镜时通常会降低移动速度(约30-50%),增加射击精度
主要应用场景
- 远程精确射击:在50米以上的交火距离中,开镜放大可显著提高命中率
- 定点防守:在掩体后开镜瞄准关键通道
- 狙击作战:专业狙击步枪通常提供2.5-12倍可变放大倍率
- 战术侦察:通过高倍镜观察远处敌情
不同类型FPS中的变体
- 竞技类FPS(如CS:GO):固定放大倍率,强调快速开镜反应
- 战术军事类(如彩虹六号):多种倍率可选,包含镜内弹道计算
- 生存类(如PUBG):可拾取不同倍率瞄准镜(红点、4倍、8倍等)
- 未来科幻类(如守望先锋):包含特殊开镜效果(热能成像、穿墙透视等)
进阶技巧
- 快速开镜射击(Quick Scope):在极短时间内完成开镜-射击-关镜的连贯动作
- 预开镜(Pre-aiming):在转角前提前开镜瞄准预计出现敌人的位置
- 镜内追踪(Tracking):保持开镜状态跟随移动目标
- 呼吸控制:模拟真实射击中的屏息机制(通常有2-5秒稳定期)
平衡性考量
游戏开发者需要权衡:
- 开镜速度与精确度的平衡
- 不同武器类别的开镜特性差异
- 放大倍率与视野受限的取舍
- 开镜状态下的移动惩罚程度
硬件支持
- 高刷新率显示器:144Hz以上可提供更流畅的开镜体验
- 鼠标宏:可编程键位设置快速开镜组合键
- 触觉反馈:部分高端手柄提供开镜时的震动反馈
最终效果
我们这里就以最简单的效果举例:
新增两个材质
镂空材质
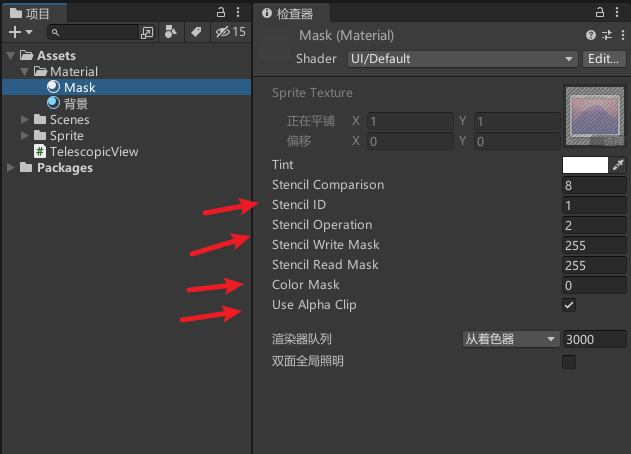
全屏遮挡材质
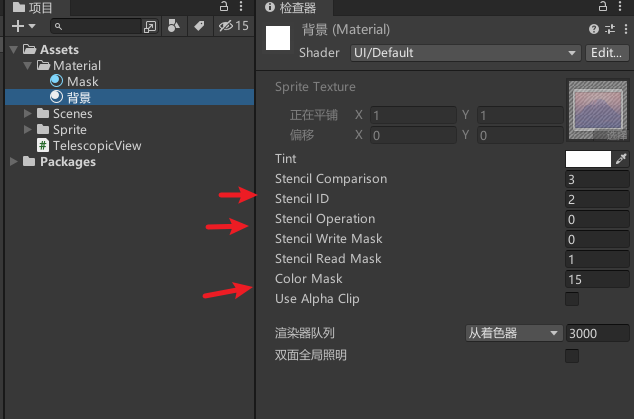
配置对应材质
这里镂空使用一个圆形图片
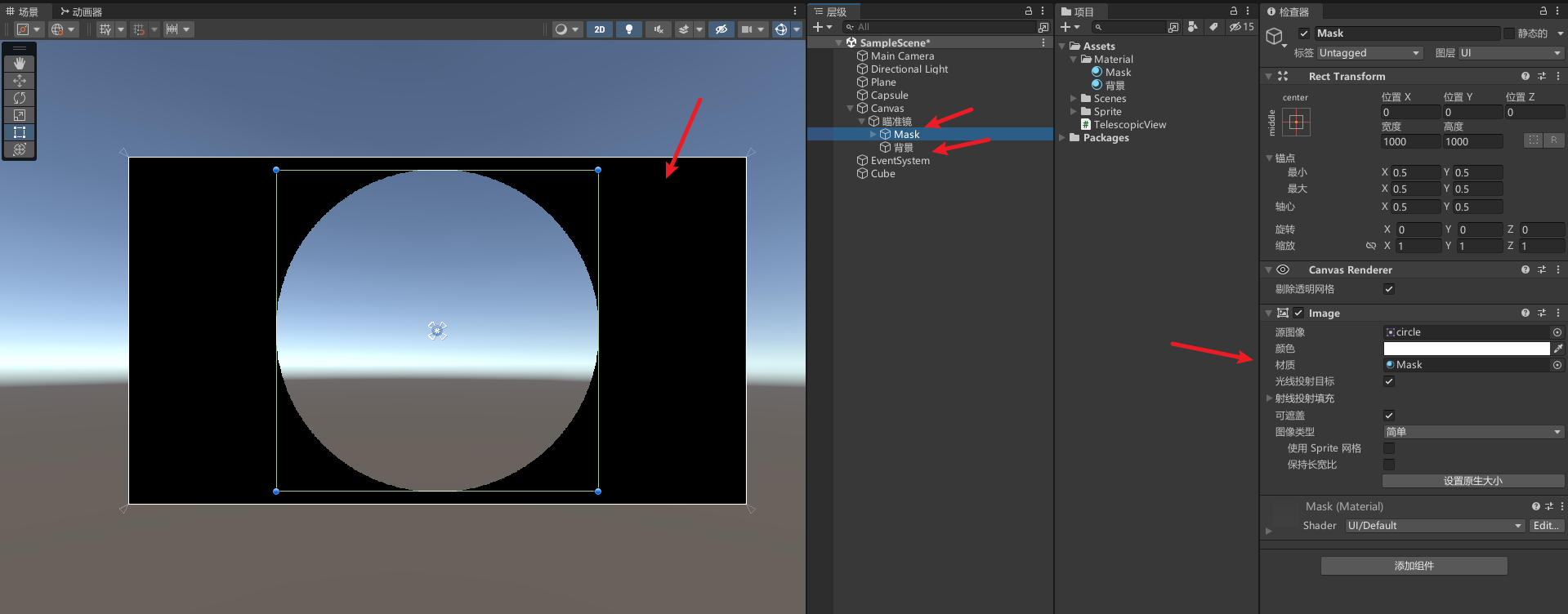
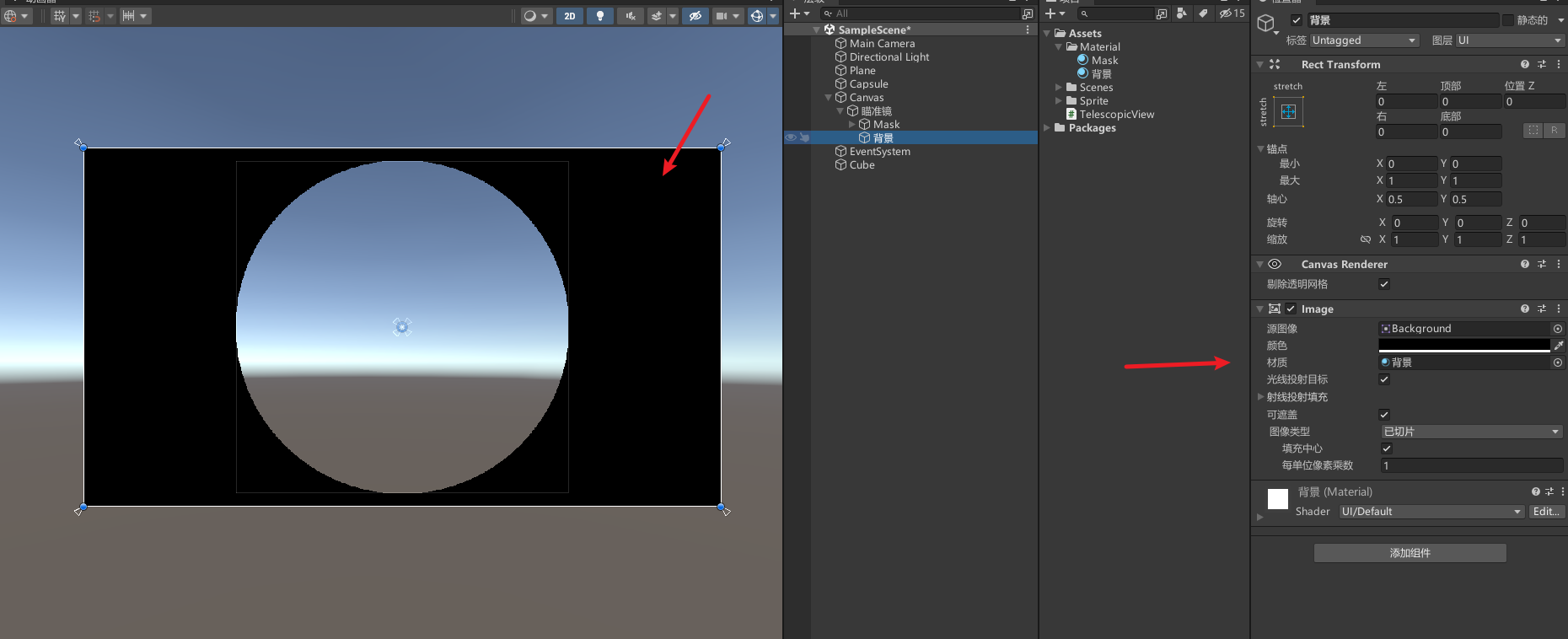
ps:注意位置Mask和背景位置不可以调换
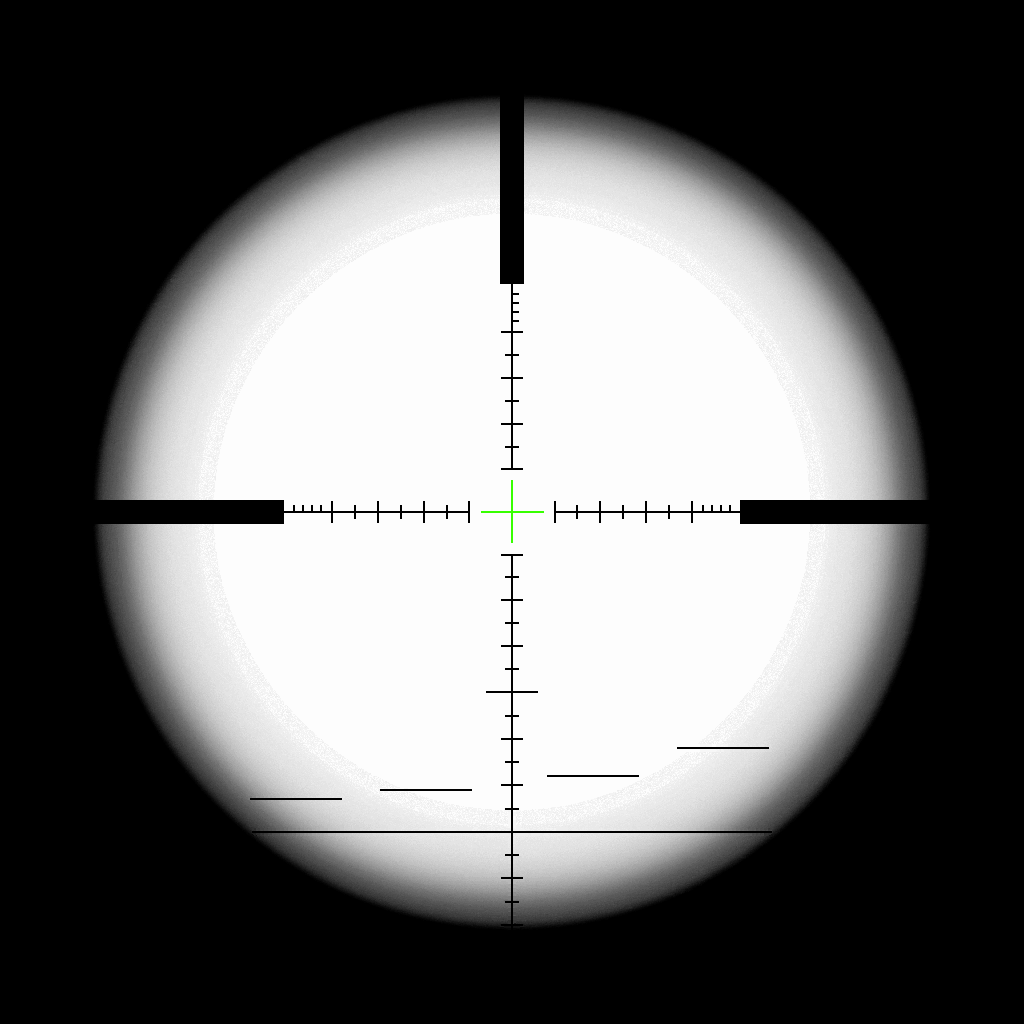
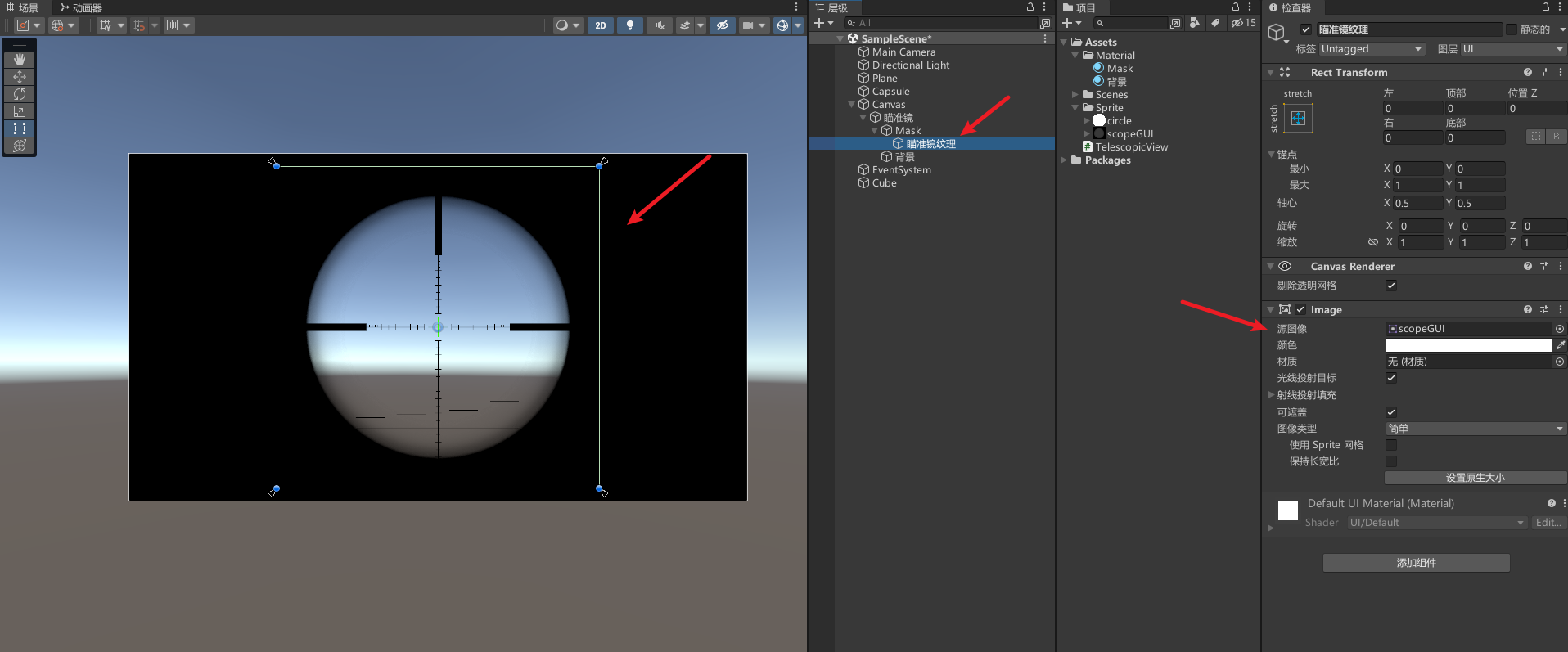
瞄准镜的纹理效果
代码控制瞄准开镜放大效果
public class TelescopicView : MonoBehaviour
{public float zoomLevel = 2.0f; // 缩放倍数public float zoomSpeed = 10f; // 缩放速度private float initialFieldOfView; // 初始视野范围private bool isAim;//是否瞄准public GameObject uiWindow; // UI窗口对象void Start(){// 获取摄像机的初始视野范围,默认值为60initialFieldOfView = Camera.main.fieldOfView;}void Update(){if (Input.GetMouseButton(1)){isAim = true;uiWindow.SetActive(true); // 激活UI窗口}if (Input.GetMouseButtonUp(1)){isAim = false;uiWindow.SetActive(false); // 失活UI窗口}if (isAim){ZoomIn();}else{ZoomOut();}}//视野平滑放大void ZoomIn(){float targetFieldOfView = initialFieldOfView / zoomLevel; // 计算目标视野范围Camera.main.fieldOfView = Mathf.Lerp(Camera.main.fieldOfView, targetFieldOfView, Time.deltaTime * zoomSpeed); // 平滑过渡到目标视野范围// 当接近目标视野范围时,直接设定为目标视野范围if (Mathf.Approximately(Camera.main.fieldOfView, targetFieldOfView)){Camera.main.fieldOfView = targetFieldOfView;}}//视野平滑缩小void ZoomOut(){Camera.main.fieldOfView = Mathf.Lerp(Camera.main.fieldOfView, initialFieldOfView, Time.deltaTime * zoomSpeed); // 平滑过渡回初始视野范围// 当接近初始视野范围时,直接设定为初始视野范围if (Mathf.Approximately(Camera.main.fieldOfView, initialFieldOfView)){Camera.main.fieldOfView = initialFieldOfView;}}
}
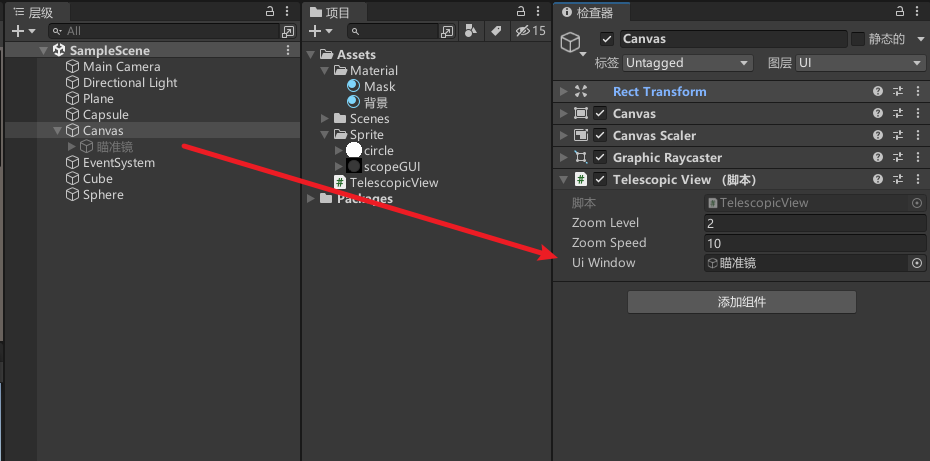
配置参数
效果