DBSCAN 算法的原理
DBSCAN 是基于密度的聚类方法,它将簇定义为密度相连的点的最大集合,能够把密度足够高 + 连在一起的区域划分为簇,不受簇形状和噪声的影响。
一、DBSCAN 的核心概念:
两个算法参数:
- Eps (Epsilon):邻域半径,表示一个点的邻居范围
- Eps 邻域:以某个点为圆心,以 Eps 为半径的圆(在更高维度中,圆变为超球面),称为这个点的 Eps 邻域
- 密度 (Density):Eps 邻域内点的个数
- MinPts (Min Points):构成一个簇的最小点数,表示一个点要成为核心点所需的最小邻居数,一个人为设定的阈限
- Eps (Epsilon):邻域半径,表示一个点的邻居范围
三种点的类型:
- 核心点 (Core Point):如果某个点邻域半径内点的个数(含自身) >= MinPts,这个点就是核心点
- 边界点 (Border Point):如果某个点邻域半径内点的个数 < MinPts,且这个点本身在另一个核心点的邻域半径内(是一个核心点的邻居),这个点就是边界点
- 噪声点 (Noise Point):如果某个点既不是核心点,也不是边界点,它就是噪声点——也就是说这个点邻域半径内点的个数 < MinPts,且这个点本身不在任何核心点的邻域半径内(不是任何核心点的邻居)
四种点的关系:
- 直接密度可达 (Directly Density Reachable):如果 p 是一个核心点,q 在 p 的 Eps 邻域内(即q 和 p 之间的距离 <= eps),就称 q 是从 p 出发直接密度可达的
- 密度可达 (Density Reachable):如果存在一系列点 p1, p2, …, pn,其中每对相邻点 pi 和 pi+1 都是直接密度可达的,则点 p1 密度可达点 pn,即密度可达可以通过一系列的直接密度可达传递。
- 密度连接 (Density Connected):如果存在两个点 p 和 q,以及一个点 o,其中 o 到 p 密度可达,o 到 q 密度可达,就称 p 和 q 是密度相连的,q 和 p 也是密度相连的(即密度相连是对称的)。
- o 到 p 密度可达:o 是核心点,p 在 o 的邻域内
- o 到 q 密度可达:o 是核心点,q 在 o 的邻域内
- p 和 q 之间不一定是密度可达的
- 非密度相连:密度相连的两个点属于同一个聚类簇,非密度相连的两个点属于不同的聚类簇,或者其中存在噪声点。
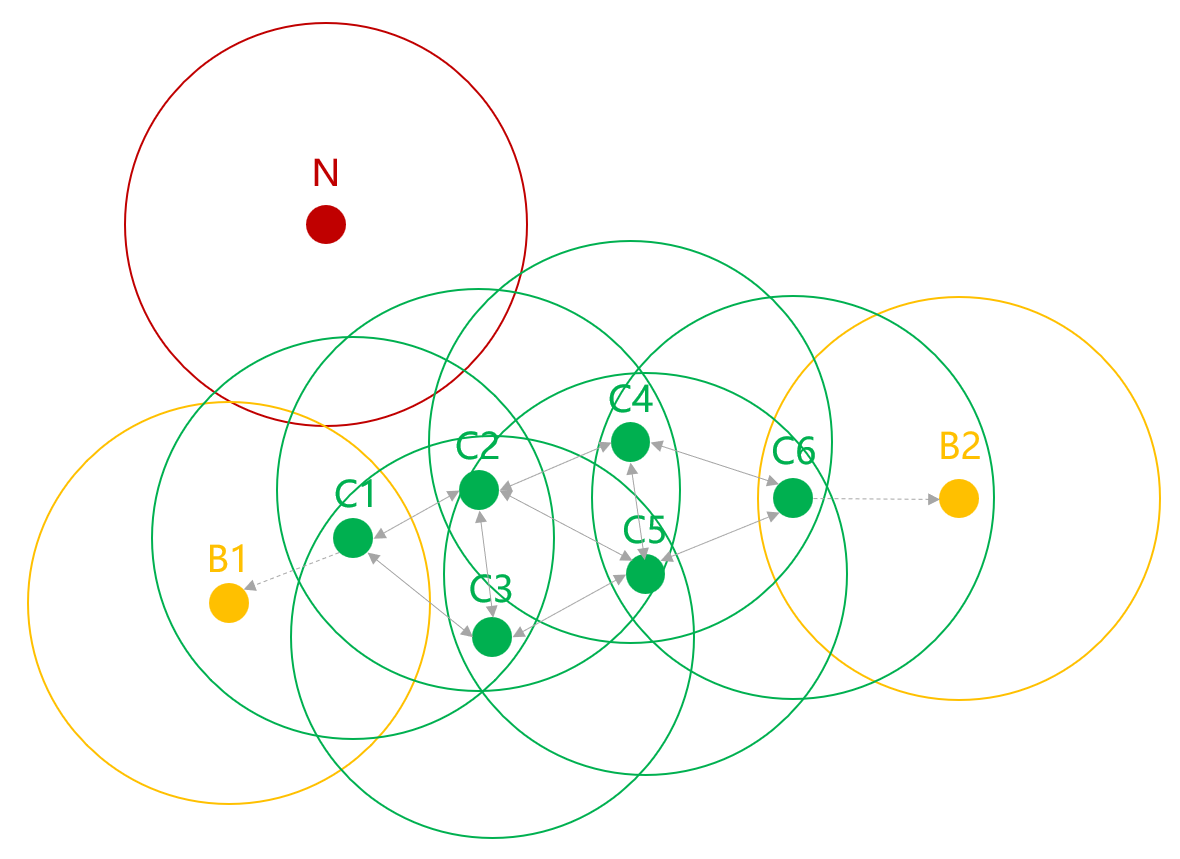
点的类型示例
以下图为例:邻域半径 Eps = 1,MinPts = 4
- C1 - C7 为核心点,以其为圆心,Eps 为半径,圆内分别包含了 4、5、4、4、5、4 个点 >= 4,因此这些点是核心点
- B1 - B2 为边界点,以其为圆心,Eps 为半径,圆内分别包含了 2、2 个点 < 4,同时B1、B2 在核心点的邻域半径内,因此这些点是边界点
- N 为噪声点,以其为圆心,Eps 为半径,圆内包含了 1 个点 < 4,同时这个点在不在任何一个核心点的邻域半径内,因此这个点是噪声点
DBSCAN 算法的目标是找到密度相连对象的最大集合,并将密度相连的最大对象集合作为簇。
二、DBSCAN 聚类算法的步骤:
(1)寻找核心点,形成临时聚类簇
1)扫描全部样本点,找出全部核心点(邻域内点的数量 >= MinPts)
2)将这些点加入核心点列表,并且每个核心点和从它出发密度可达的点形成一个临时聚类簇(也就是核心点和它邻域内的所有点组成一个临时聚类簇)
(2)合并临时聚类簇,得到聚类簇
3)对于每个临时聚类簇,检查其中的点是否是核心点(是否在核心点列表中),如果是,将该核心点对应的临时聚类簇和当前聚类簇合并,得到新的临时聚类簇
4)重复此操作,直到当前临时聚类簇中的所有点,要么是核心点且从它出发密度直达的点都已经在该临时聚类簇内,要么是非核心点(也就是边界点)
5)将该临时聚类簇升级为聚类簇
(3)继续对剩余的临时聚类簇进行相同的合并操作,直到全部临时聚类簇都被处理
所有点,要么在聚类簇中,要么是噪声点
算法步骤示例
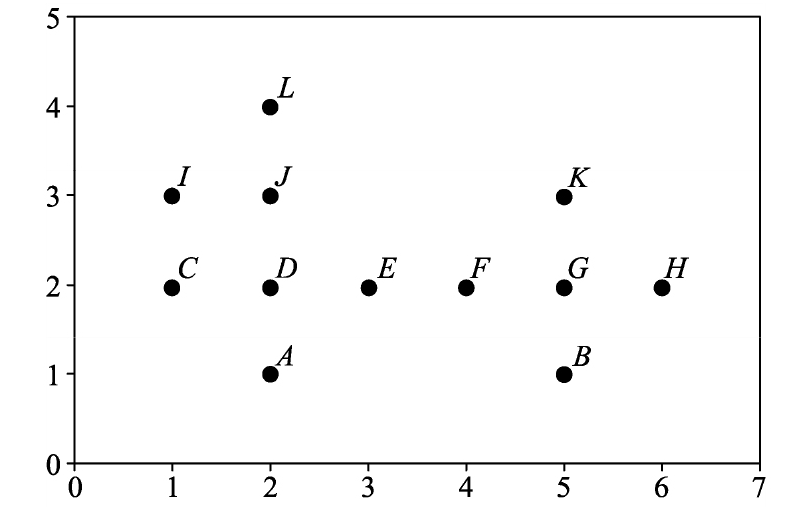
- 有数据集 D,n = 12,数据如下所示,取 eps = 1, MinPts = 4,使用 DBSCAN 算法对其进行聚类。
数据点 | A | B | C | D | E | F | G | H | I | J | K | L |
X1 | 2 | 5 | 1 | 2 | 3 | 4 | 5 | 6 | 1 | 2 | 5 | 2 |
X2 | 1 | 1 | 2 | 2 | 2 | 2 | 2 | 2 | 3 | 3 | 3 | 4 |
- 计算每个点到其他点的距离,使用欧式距离:
A | B | C | D | E | F | G | H | I | J | K | L | |
A | 0.0 | 3.0 | 1.4 | 1.0 | 1.4 | 2.2 | 3.2 | 4.1 | 2.2 | 2.0 | 3.6 | 3.0 |
B | 3.0 | 0.0 | 4.1 | 3.2 | 2.2 | 1.4 | 1.0 | 1.4 | 4.5 | 3.6 | 2.0 | 4.2 |
C | 1.4 | 4.1 | 0.0 | 1.0 | 2.0 | 3.0 | 4.0 | 5.0 | 1.0 | 1.4 | 4.1 | 2.2 |
D | 1.0 | 3.2 | 1.0 | 0.0 | 1.0 | 2.0 | 3.0 | 4.0 | 1.4 | 1.0 | 3.2 | 2.0 |
E | 1.4 | 2.2 | 2.0 | 1.0 | 0.0 | 1.0 | 2.0 | 3.0 | 2.2 | 1.4 | 2.2 | 2.2 |
F | 2.2 | 1.4 | 3.0 | 2.0 | 1.0 | 0.0 | 1.0 | 2.0 | 3.2 | 2.2 | 1.4 | 2.8 |
G | 3.2 | 1.0 | 4.0 | 3.0 | 2.0 | 1.0 | 0.0 | 1.0 | 4.1 | 3.2 | 1.0 | 3.6 |
H | 4.1 | 1.4 | 5.0 | 4.0 | 3.0 | 2.0 | 1.0 | 0.0 | 5.1 | 4.1 | 1.4 | 4.5 |
I | 2.2 | 4.5 | 1.0 | 1.4 | 2.2 | 3.2 | 4.1 | 5.1 | 0.0 | 1.0 | 4.0 | 1.4 |
J | 2.0 | 3.6 | 1.4 | 1.0 | 1.4 | 2.2 | 3.2 | 4.1 | 1.0 | 0.0 | 3.0 | 1.0 |
K | 3.6 | 2.0 | 4.1 | 3.2 | 2.2 | 1.4 | 1.0 | 1.4 | 4.0 | 3.0 | 0.0 | 3.2 |
L | 3.0 | 4.2 | 2.2 | 2.0 | 2.2 | 2.8 | 3.6 | 4.5 | 1.4 | 1.0 | 3.2 | 0.0 |
- 在 eps 范围内,点数量 >= 4 的点有:D, G, J
- 聚类:
(1)扫描核心点,得到核心点列表 [D, G, J]
(2)每个核心点和从它出发密度可达的点形成一个临时聚类簇
- 从核心点 D 出发,可以得到临时聚类簇 [A, C, D, E, J]
- 从核心点 G 出发,可以得到临时聚类簇 [B, F, G, H, K]
- 从核心点 J 出发,可以得到临时聚类簇 [D, I, J, L]
(3)合并临时聚类簇
- 核心点 D 的临时聚类簇 [A, C, D, E, J] 中,包含另一个核心点 J
- 将 J 对应的临时聚类簇 [D, I, J, L] 和 D 对应的临时聚类簇合并,得到新的临时聚类簇 [A, C, D, E, I, J, L]
- 新的临时聚类簇,只包含:①核心点,且从它出发密度直达的点都已经在该临时聚类簇内 ②非核心点
- 临时聚类簇升级为聚类簇 [A, C, D, E, I, J, L]
(4)继续合并其他临时聚类簇
- 核心点 G 的临时聚类簇 [B, F, G, H, K] 中,不包含其他核心点
- 升级为聚类簇 [B, F, G, H, K]
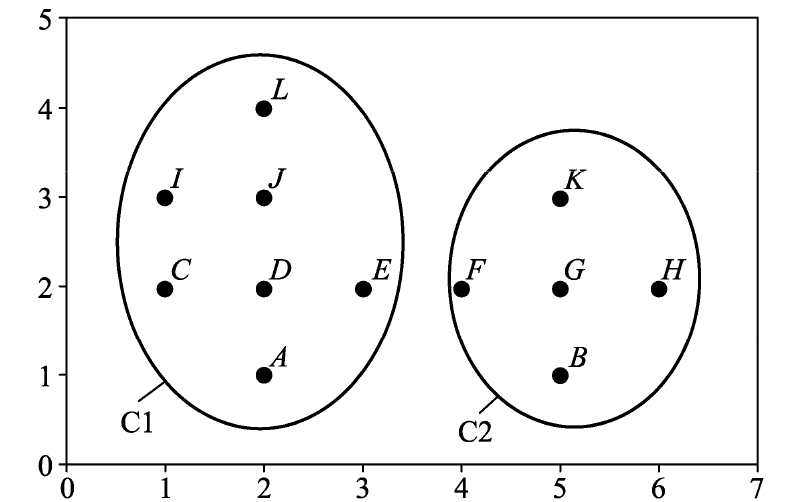
(5)所有点均在聚类簇中,聚类完成
- 两个聚类簇:[A, C, D, E, I, J, L]、[B, F, G, H, K]
三、Eps 和 MinPts 值的确定
Eps 可以通过绘制 K-距离曲线(K-Distance Graph)来确定
K-距离:对于给定的 K ,对每个点,计算其对应的第 K 个最近邻点和它的距离,得到 K 距离值,并将所有点对应的 K 距离值按照降序排序,得到 K-距离曲线,曲线中第一个谷点位置对应的 K 距离值,是较好的 Eps 值选择。
K-距离曲线对 K 值的大小不敏感,一般可以将 K 值设置为4。
MinPts 的设置原则:(1)MinPts 不能为 1,因为 MinPts = 1 意味着每个点都是一个簇,没有意义;(2)MinPts 为2时,和层次距离最近邻域结果相同;(3)MinPts 应该选择 >= 3 的值;(4)MinPts 应该 >= dim + 1,dim 是待聚类数据的维度;MinPts 最好是维度数的 2 倍。
四、DBSCAN 算法的优缺点
优点:
不易受噪声影响——可以过滤低密度区域,发现稠密样本区域
能够发现任意形状的簇
不需要预先指定要聚类的簇数
缺点:
参数选取困难
不适合多密度数据和变化密度数据
数据集大时,收敛时间长
不适合高维数据