ROS机器人云实践案例设计
ROS机器人云实践项目
│
├── src/ # 源代码目录
│ ├── robot_bringup/ # 机器人启动与配置
│ │ ├── CMakeLists.txt
│ │ ├── package.xml
│ │ └── launch/
│ │ └── robot.launch # 机器人启动文件
│ │
│ ├── robot_control/ # 机器人控制
│ │ ├── CMakeLists.txt
│ │ ├── package.xml
│ │ ├── src/
│ │ │ └── robot_control_node.cpp # 机器人控制节点
│ │ └── include/
│ │ └── robot_control/robot_control.h
│ │
│ ├── robot_navigation/ # 机器人导航
│ │ ├── CMakeLists.txt
│ │ ├── package.xml
│ │ ├── src/
│ │ │ ├── global_planner.cpp # 全局路径规划节点
│ │ │ └── local_planner.cpp # 局部路径规划节点
│ │ └── launch/
│ │ └── navigation.launch # 导航启动文件
│ │
│ ├── robot_perception/ # 机器人感知
│ │ ├── CMakeLists.txt
│ │ ├── package.xml
│ │ ├── src/
│ │ │ └── laser_scan_processing.cpp # 激光雷达数据处理节点
│ │ └── include/
│ │ └── robot_perception/laser_scan_processing.h
│ │
│ └── robot_innovation/ # 机器人创新项目
│ ├── CMakeLists.txt
│ ├── package.xml
│ ├── src/
│ │ └── innovation_node.cpp # 创新项目节点
│ └── include/
│ └── robot_innovation/innovation.h
│
├── docs/ # 文档目录
│ ├── project_guide.md # 项目指南
│ └── api_reference.md # API参考文档
│
└── README.md # 项目说明文件- 项目结构图:
- 使用树形图展示项目的整体结构,包括源代码目录(
src/)、文档目录(docs/)以及项目说明文件(README.md)。 - 在源代码目录下,进一步细分各个功能模块,如机器人启动与配置(
robot_bringup/)、机器人控制(robot_control/)、机器人导航(robot_navigation/)、机器人感知(robot_perception/)以及机器人创新项目(robot_innovation/)。
- 使用树形图展示项目的整体结构,包括源代码目录(
robot_control_node.cpp
│
├── #include <ros/ros.h>
├── #include <geometry_msgs/Twist.h>
├──
├── int main(int argc, char** argv) {
│ ├── ros::init(argc, argv, "robot_control_node");
│ ├── ros::NodeHandle nh;
│ ├── ros::Publisher pub = nh.advertise<geometry_msgs::Twist>("cmd_vel", 10);
│ ├── ros::Rate loop_rate(10);
│ ├──
│ ├── while (ros::ok()) {
│ │ ├── geometry_msgs::Twist msg;
│ │ ├── // 设置线速度与角速度
│ │ ├── msg.linear.x = 0.5;
│ │ ├── msg.angular.z = 0.2;
│ │ ├── pub.publish(msg);
│ │ ├── ros::spinOnce();
│ │ └── loop_rate.sleep();
│ └── }
│
└── return 0;
}ROS机器人云实践设计
一、课程定位与目标
课程网址:ROS机器人云实践课程(示例链接,实际需替换)
面向专业与年级:本课程专为应用型本科院校的机器人工程、自动化、智能制造及相关专业的高年级本科生(如大三、大四)设计。
课程目标:
- 技能掌握:通过云实践平台,使学生深入理解并掌握ROS在移动机器人中的应用,包括自主导航、环境感知与决策等关键技术。
- 实践能力提升:增强学生的机器人编程能力、系统设计与实践能力,培养其独立解决实际问题的能力。
- 创新思维培养:激发学生的创新思维,鼓励其在ROS机器人技术领域进行持续探索与创新。
- 职业素养形成:通过团队协作、项目报告撰写等环节,培养学生的职业素养与综合能力。
二、实验环境与工具配置
硬件环境:
- 提供多样化的机器人平台选择,包括但不限于轮式机器人、人形机器人等,以满足不同实验需求。
- 实验室配备高性能计算机,支持ROS及仿真软件的运行。
软件环境:
- 安装多种ROS发行版(如Ubuntu下的ROS Kinetic),提供详细的安装指南与技术支持。
- 集成Gazebo仿真环境、RViz可视化工具、PCL点云处理库等关键软件,支持机器人建模、仿真与可视化。
云实践系统:
- 利用蓝桥云课等ROS机器人云实践平台,提供远程访问与计算资源,确保学生随时随地开展实验。
- 平台支持个性化定制与第三方开源扩展,满足不同教学需求。
三、核心实验内容设计
1. ROS基础与环境配置
实验目的:使学生熟悉ROS环境,掌握基本操作,为后续实验打下基础。
实验步骤:
- ROS安装与配置:引导学生完成ROS的安装过程,包括核心库、工具及仿真环境的配置。
- 工作空间创建:指导学生创建ROS工作空间(catkin_ws),并配置环境变量。
- 基础命令练习:通过案例分析、互动问答等方式,让学生掌握roscore、rosnode、rostopic、rosservice等基础命令的使用。
实验要点:
- 提供详细的操作指南与视频教程,降低学习门槛。
- 设置在线答疑与讨论区,及时解决学生遇到的问题。
2. 移动机器人建模与仿真
实验目的:让学生理解机器人建模与仿真的基本流程,掌握在ROS和Gazebo中配置和使用机器人模型的方法。
实验内容:
- 模型选择与设计:提供多种预设机器人模型(如F1/10th自动驾驶小车),同时鼓励学生根据实际需求设计并制作机器人模型。
- 传感器配置:为机器人添加激光雷达、摄像头、IMU等传感器,并配置相应的ROS驱动。
- 仿真环境搭建:在Gazebo中创建或导入包含障碍物的室内/室外环境,用于机器人导航测试。
- 机器人控制:编写ROS节点,通过发布速度指令控制机器人在仿真环境中移动。
实验创新:
- 引入3D打印技术,允许学生将设计的机器人模型进行实体化,增强实践操作的趣味性。
- 设置仿真挑战赛,如最短路径规划、避障挑战等,激发学生的竞争意识与创新思维。
3. 环境感知与地图构建
实验目的:使学生理解环境感知与地图构建的原理,掌握SLAM算法在ROS中的实现与应用。
实验步骤:
- 激光雷达数据采集:编写ROS节点订阅激光雷达话题,获取环境距离信息。
- SLAM算法实现:对比分析GMapping、Hector SLAM、Cartographer等算法的性能差异,结合实际应用场景选择最优算法。
- 地图可视化与评估:将构建的地图在RViz中可视化,结合地面真实数据评估地图质量。
实验要点:
- 引入点云处理库(如PCL),提升学生对激光雷达数据的处理能力。
- 设置算法调优环节,鼓励学生根据实际需求对SLAM算法进行参数调整与优化。
4. 自主导航与路径规划
实验目的:通过实践,让学生掌握自主导航与路径规划的关键技术,提升机器人在复杂环境中的适应能力。
实验内容:
- 全局路径规划:使用A、Dijkstra、RRT等算法,在已知地图上规划从起点到终点的路径。
- 局部路径规划:实现TEB、DWA等局部路径规划算法,以应对动态障碍物。
- 导航测试与优化:在仿真环境中测试机器人的自主导航能力,包括避障、路径跟踪等,并根据测试结果进行算法优化。
实验创新:
- 引入多机器人协同导航实验,通过通信协议实现机器人间的信息共享与任务分配。
- 设置人机共融导航实验,探索机器人与人类的无缝交互与协同作业模式。
5. ROS机器人技术创新项目
实验目的:激发学生的创新思维,鼓励其从实际应用出发,提出具有创新性的解决方案,并通过实验验证其可行性与有效性。
实验流程:
- 问题定义与需求分析:引导学生从实际应用场景出发,定义具有挑战性的问题,并进行详细的需求分析。
- 算法设计与实现:鼓励学生突破传统思维框架,设计并实现具有创新性的算法或改进现有算法。
- 实验验证与性能评估:在仿真环境中对新算法进行全面测试,与现有算法进行对比分析,评估其性能提升与适用范围。
- 报告撰写与成果展示:撰写详细的实验报告,总结创新点、实现方法、实验结果与结论,并通过学术交流会议、机器人竞赛等活动展示其创新成果。
四、教学支持与评估体系
教学支持:
- 提供详细的实验指南、视频教程与在线答疑服务,确保学生能够顺利完成实验任务。
- 设立助教团队,负责实验过程中的技术指导与问题解决。
- 定期组织线上/线下交流会,分享学习心得与实验经验。
评估体系:
- 过程性评价:根据学生的实验参与度、问题解决能力与团队协作能力进行综合评价。
- 成果性评价:根据学生的实验报告、创新项目成果与竞赛获奖情况进行评分。
- 反馈与改进:定期收集学生反馈意见,对课程内容与教学方法进行持续改进与优化。
通过上述案例设计,应用型本科院校的学生能够在ROS机器人云实践课程中深入理解并掌握关键技术,提升实践能力与创新思维,为未来的职业发展奠定坚实基础。
一、课程概览与目标深化
课程网址:ROS机器人云实践课程
面向专业与年级:本课程专为机器人工程、自动化、智能制造等专业的高年级本科生(如大三、大四)设计,旨在通过前沿技术实践,培养未来机器人领域的领军人才。
实验背景与目标升级:
随着机器人技术的迅猛发展,ROS(Robot Operating System)已成为机器人研发领域的标准软件框架,其重要性不言而喻。
本课程不仅旨在让学生深入理解并掌握ROS在移动机器人中的应用,特别是自主导航、环境感知与决策等核心技术,更致力于激发学生的创新思维,培养其独立解决问题的能力。通过云实践平台与定制AI学习助手的融合,学生将在虚拟仿真环境中亲历机器人技术的每一个精彩瞬间,从而全面提升机器人编程能力、系统设计与实践能力,以及技术创新思维。
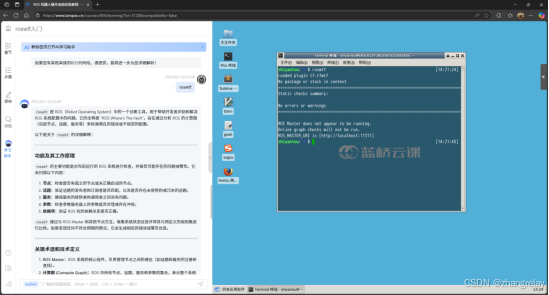
图1.1 云实践平台接入定制AI学习助手
二、实验环境与工具的全面升级
硬件环境:学生可根据实验需求自由选择实验室内的各类机器人平台,从轮式机器人到人形机器人,满足不同场景下的实践需求。
软件环境:提供多种ROS发行版及开发工具链,支持Ubuntu、ROS Kinetic等多版本切换,确保学生能够掌握不同环境下的开发技巧。
云实践系统:利用蓝桥云课ROS机器人云实践平台,学生不仅能够随时随地通过互联网访问远程实验资源,还能享受平台提供的强大计算能力,支持复杂算法的快速验证与迭代。
平台的开放性与灵活性,为学生创造了无限的创新空间。

图2.1 蓝桥云课ROS机器人网页界面
三、主要实验内容的深度拓展与创新
1. ROS环境搭建与基础操作进阶
实验目的:不仅要求学生熟悉ROS环境,掌握基本操作,更强调对ROS核心机制的理解,如节点间通信、消息传递等,为后续复杂实验打下坚实基础。
实验步骤细化:
- ROS安装复习:通过视频教程、在线文档等多种形式,帮助学生巩固ROS安装过程,包括核心库、工具及仿真环境的配置。
- 工作空间配置:详细讲解catkin工作空间的创建与管理,包括环境变量配置、编译系统使用等,确保学生能够独立完成项目搭建。
- 基础命令实践:通过案例分析、互动问答等方式,引导学生深入理解roscore、rosnode、rostopic、rosservice等命令的使用场景与原理。
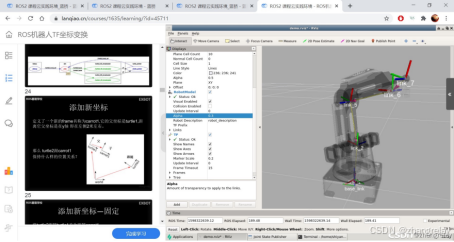
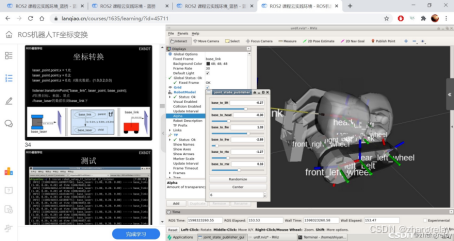
图3.1 ROS机器人云实践平台实践演示,左侧教程,右侧实操
2. 移动机器人建模与仿真创新
实验目的升级:在理解机器人建模与仿真基本流程的基础上,鼓励学生探索新型传感器融合技术,提升机器人环境感知能力。
实验内容拓展:
- 机器人模型选择与设计:引入3D打印技术,允许学生根据实际需求设计并制作机器人模型,增强实践操作的趣味性。
- 传感器配置与优化:除了激光雷达、摄像头外,增加IMU(惯性测量单元)、超声波传感器等,实现多源数据融合,提高环境感知精度。
- 仿真环境构建:利用Gazebo的插件系统,模拟真实世界中的光照、材质等物理特性,为机器人导航提供更加逼真的测试环境。
- 机器人控制算法创新:引入深度强化学习算法,如DDPG(Deep Deterministic Policy Gradient),实现机器人在复杂环境中的自主决策与控制。
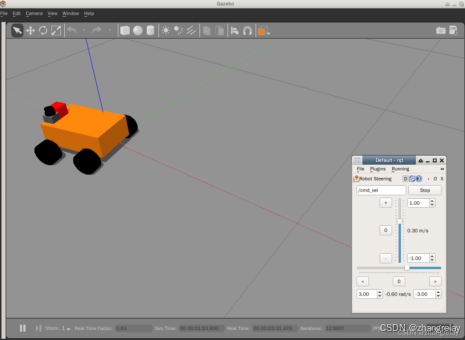
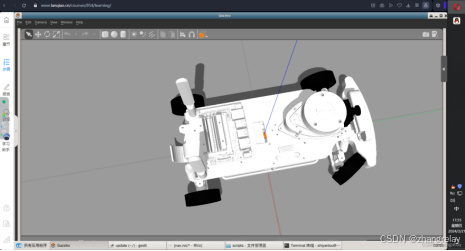
图3.2 云实践移动机器人建模与仿真效果,从简单到复杂
3. 环境感知与地图构建技术前沿
实验目的深化:不仅要求学生掌握SLAM算法在ROS中的实现与应用,更鼓励其探索SLAM技术在动态环境中的适应性问题,提出创新性解决方案。
实验步骤创新:
- 激光雷达数据采集与处理:引入点云处理库如PCL(Point Cloud Library),实现激光雷达数据的实时滤波、聚类等预处理操作。
- SLAM算法选择与优化:对比分析GMapping、Hector SLAM、Cartographer等多种SLAM算法的性能差异,结合实际应用场景选择最优算法。同时,探索基于深度学习的SLAM方法,如Loam-Livox,提升在复杂环境中的建图精度与鲁棒性。
- 地图可视化与评估:利用RViz进行地图可视化,结合地面真实数据评估地图质量,提出改进措施。同时,探索三维地图构建技术,为机器人提供更加丰富的环境信息。
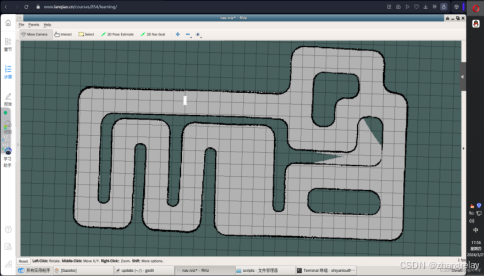
图3.3 云实践移动机器人SLAM地图rviz可视化效果图
4. 自主导航与路径规划技术突破
实验目的升级:在掌握全局与局部路径规划算法的基础上,鼓励学生探索多机器人协同导航、人机共融等前沿课题,提升机器人在复杂环境中的适应能力与交互能力。
实验内容创新:
- 全局路径规划算法优化:引入A、Dijkstra、RRT等高级路径规划算法,结合实际应用场景进行算法调优,提高路径规划效率与质量。
- 局部路径规划算法创新:实现TEB(Timed Elastic Band)、DWA(Dynamic Window Approach)等局部路径规划算法,并探索其与深度强化学习的结合路径,提升机器人在动态障碍物环境中的避障能力。
- 多机器人协同导航:设计并实现多机器人协同导航系统,通过通信协议实现机器人间的信息共享与任务分配,提高整体作业效率。
- 人机共融导航:探索人机共融环境下的机器人导航技术,实现机器人与人类的无缝交互与协同作业,为未来智能制造、智慧医疗等领域提供技术支持。
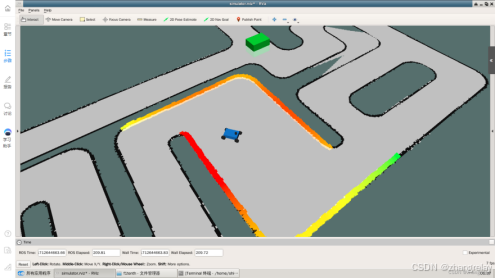
图3.4 云实践自主导航中的移动机器人截图
5. ROS机器人技术创新与实践探索
实验目的深化:激发学生的创新思维,鼓励其从实际应用出发,提出具有创新性的解决方案,并通过实验验证其可行性与有效性。
实验思考拓展:
- 问题定义与需求分析:引导学生从实际应用场景出发,定义具有挑战性的问题,如提高导航效率、增强避障能力、优化能耗等,并进行详细的需求分析。
- 算法设计与实现创新:鼓励学生突破传统思维框架,设计并实现具有创新性的算法或改进现有算法,如基于深度学习的路径规划算法、多传感器融合的环境感知算法等。
- 实验验证与性能评估:在仿真环境中对新算法进行全面测试,与现有算法进行对比分析,评估其性能提升与适用范围。同时,探索算法在实际机器人平台上的部署与优化路径。
- 报告撰写与成果展示:撰写详细的实验报告,总结创新点、实现方法、实验结果与结论。同时,鼓励学生参加学术交流会议、机器人竞赛等活动,展示其创新成果与实践能力。
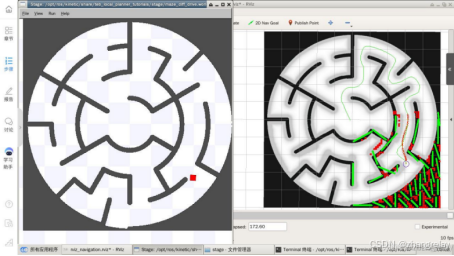
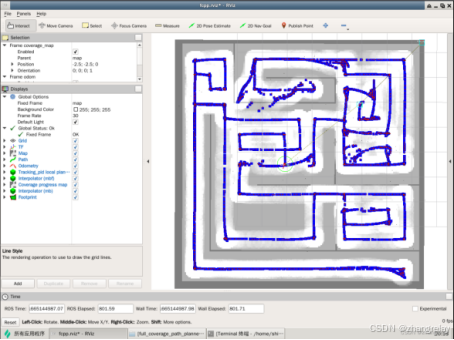
图3.5 云实践中迷宫和区域清扫创新案例截图
四、实验总结与未来展望
通过此类深度实践课程的学习与实践,学生不仅掌握了ROS机器人编程、移动机器人设计与实践、机器人技术创新与实践等核心技能,还显著提升了问题解决能力、团队协作能力与技术创新思维。
未来,随着机器人技术的不断发展与ROS生态系统的日益完善,ROS将在更多领域发挥重要作用。因此,持续学习与实践ROS机器人技术对于培养学生的创新能力和适应未来职业发展具有重要意义。同时,我们也期待更多创新性的实践课程与教学平台的出现,共同推动机器人教育事业的蓬勃发展。
本文介绍了ROS机器人云实践课程的项目结构与教学内容。项目采用模块化设计,包含机器人启动、控制、导航、感知和创新5个核心模块,通过CMake和launch文件实现系统集成。课程面向高年级本科生,结合云平台和AI助手,提供从基础配置到创新项目的阶梯式实验:1)ROS环境搭建与核心命令;2)Gazebo仿真与机器人建模;3)SLAM算法实现与地图构建;4)全局/局部路径规划技术;5)创新项目开发。教学采用"理论-仿真-实践"三阶段模式,通过3D打印、多机协同等创新实验激发学生兴趣,配套评估体系覆盖过程表现与项目成果,旨在培养具备ROS开发能力和创新思维的机器人工程师。