工业级 CAN 与以太网桥梁:串口服务器CAN通讯转换器深度解析(下)
四、进阶配置:解锁更多实用功能
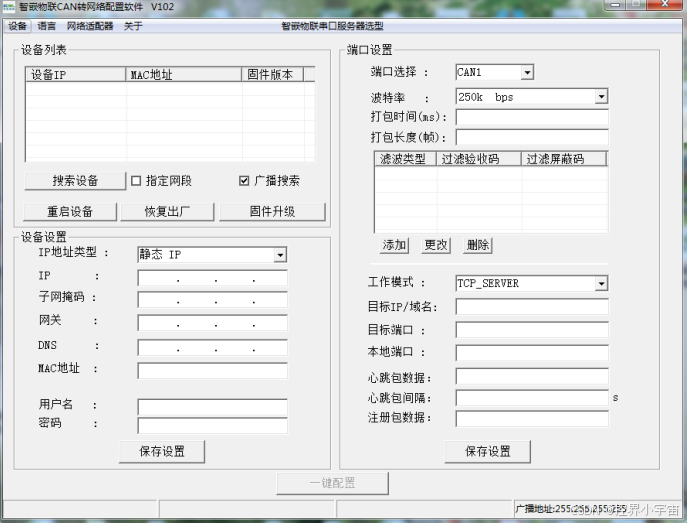
1. 参数配置方式
- 配置软件:通过 "智嵌串口服务器配置软件" 可设置 IP、子网掩码、CAN 波特率等参数,支持固件升级和恢复出厂设置;
- 网页配置:在浏览器输入设备 IP,使用默认用户名 admin 和密码 admin 登录,可图形化配置 IP 地址、CAN 参数、滤波器等。
如果要使用网页进行参数配置,首先要知道模块的 IP,如果不慎忘记,可以通过按住
“CFG”按键,保持 5 秒,模块恢复出厂设置,此时模块的 IP 是:192.168.1.253。在浏览
器中输入:http://192.168.1.253/,回车,则出现配置网页,需要认证用户名和密码(和配置软 件 中 的 一 致 ), 初 始 用 户 名 为 : admin , 初 始 密 码 为 : admin 。
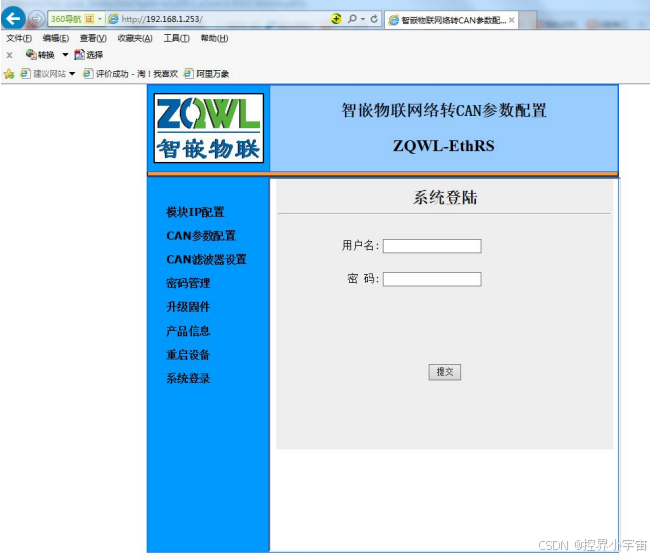
登陆成功后就可以对模块配置了:
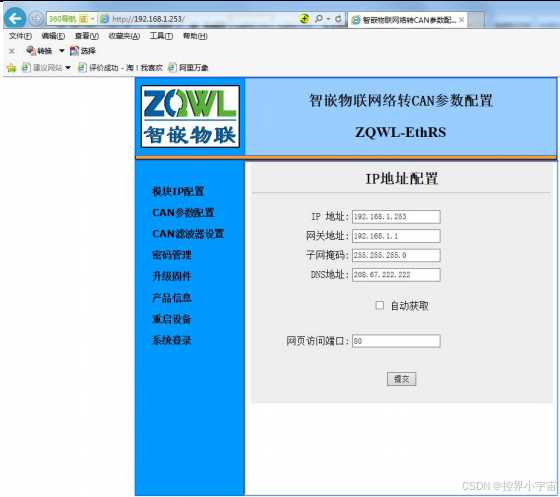
如上图,在“IP 地址配置”页面中,可以配置模块的 IP 信息,以及是否要使用自动获
取 IP。
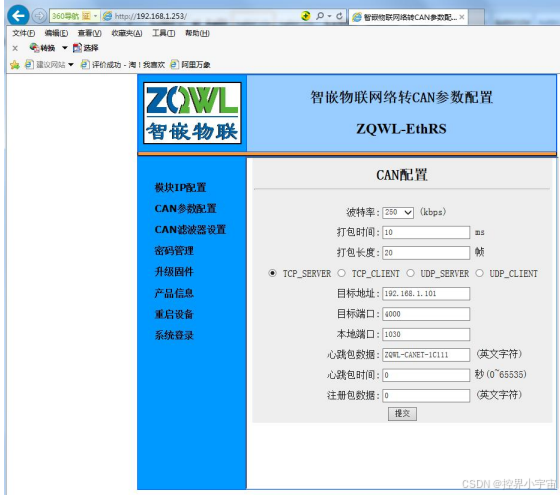
如上图,在“CAN 参数配置”页面中,可以设置所需的 CAN 参数(各项参数含义见下
文)
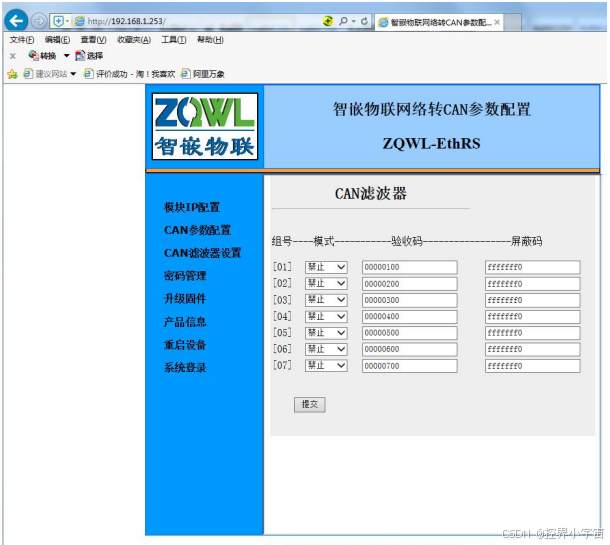
如上图,在“CAN 滤波器设置”页面中,可以设置 CAN 的滤波器(网页版支持 7 组)
如上图,在“密码管理”页面中,可以修改模块的登陆密码。
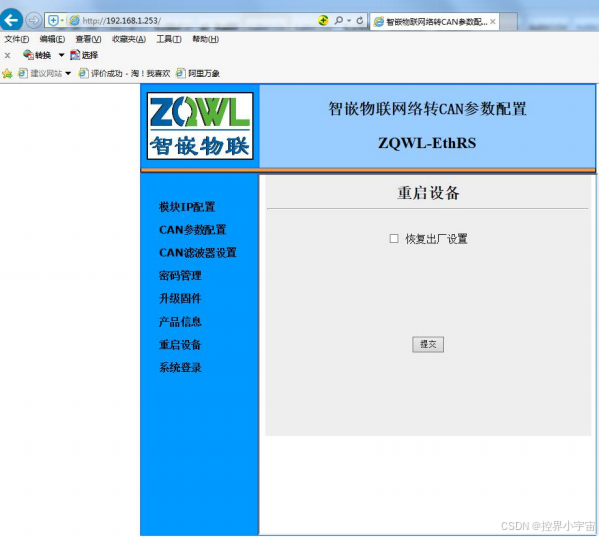
如上图,在“重启设备”页面中,可以对设备重启,如果选中“恢复出厂设置”,则模
块参数将恢复到出厂参数。
2. 终端电阻设置
设备配备 2 位拨码开关,用于配置 CAN 总线终端电阻:
- 单拨码 ON:120Ω 电阻
- 双拨码 ON:60Ω 电阻(并联)
- 出厂默认不接入电阻
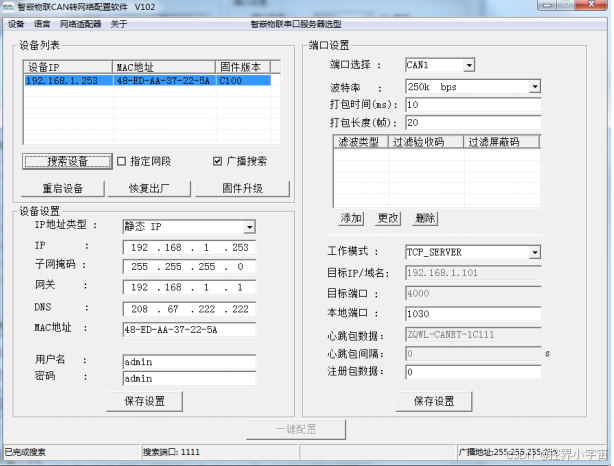
3. 工作模式选择
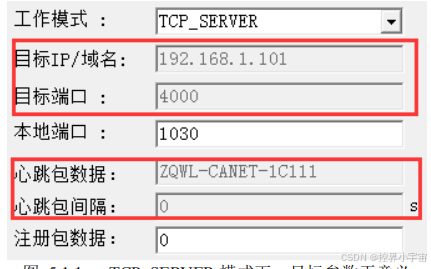
- TCP_SERVER:默认模式,支持 4 个客户端连接,本地端口 1030 为监听端口;
设备默认的工作模式即是 TCP_SERVER 模式,该模式下,“目标 IP/域名”、“目标端口”、
“心跳包数据”和“心跳包间隔”无意义,参数默认即可。
“本地端口”正是 CAN 对应的 TCP 监听端口号,作为 TCP 客户端的设备需要连接这
个端口号(1030)。
该模式下,每个端口最多支持 4 个客户端的连接,每个客户端都可以接收到 CAN 发来
的数据,并且每个客户端都可以向 CAN 发数据。
当有客户端连接成功后,设备自动开启“keep alive”保活机制:如果 TCP 没有数据收
发后,每隔 20 秒向客户端发送一个“keep alive”数据包来探测 TCP 客户端是否还在,如果
客户端不在(没有收到回复),则断开该 TCP 连接,释放资源以待客户端重新连接。
- TCP_CLIENT:主动连接目标服务器,支持心跳包功能,适合外网通讯;
该模式下,设备作为 TCP 客户端,主动向“目标 IP/域名”和“目标端口”所指定的
TCP 服务器发起连接,直到连接成功。
连接成功后,设备自动开启“keep alive”保活机制:如果 TCP 没有数据收发后,每隔
20 秒向服务器发送一个“keep alive”数据包来探测 TCP 服务器是否还在,如果服务器不在
(没有收到回复),则断开该 TCP 连接,并向服务器重连。
“目标 IP/域名”一栏中,既可以填 IP 也可以填域名,设备会自动解析。如果“本地端
口”填 0,则本地端口有系统随机分配。
现在以电脑 IP 为 192.168.1.100 来做测试。
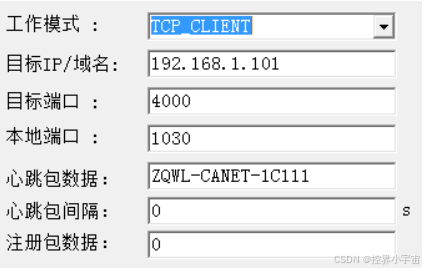
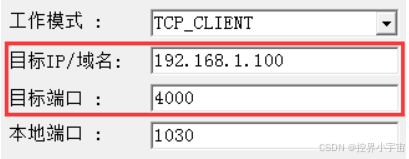
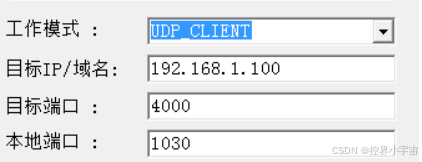
首先将 CAN 的工作模式选“TCP_CLIENT”模式,“目标 IP/域名”一栏填:192.168.1.100
(即电脑的 IP);“目标端口”一栏中填 4000(此端口对应网络助手里的“本地端口号”)
设置好后,点“保存参数”,然后重启设备。
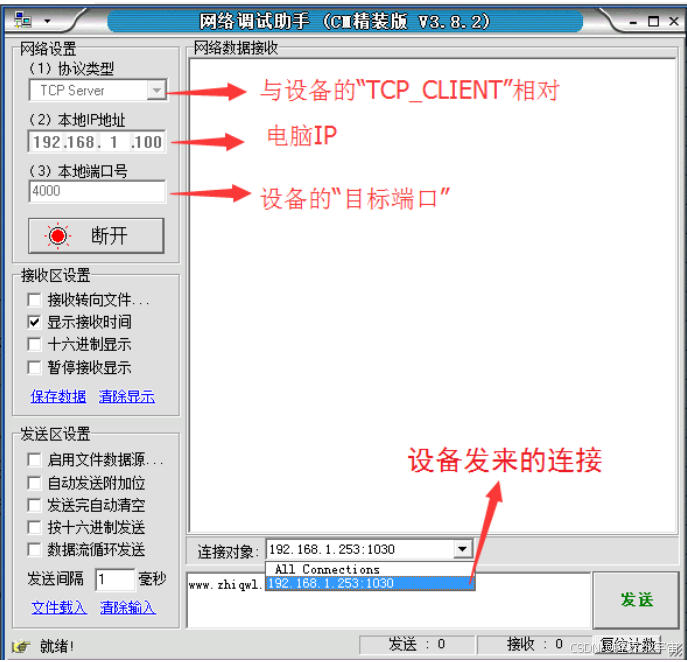
打开网络调试助手和 CAN 调试软件,在网络助手里,“协议类型”选“TCP Server”(与
CAN 的工作模式相对应);“本地 IP 地址”即为电脑的 IP 地址: 192.168.1.100;“本地端口”
即为 CAN 的“目标端口”:4000。设置好后,点网络调试助手的“连接”,进入监听状态。
稍等片刻后,我们就可以在“连接对象”的下拉表中看到 CAN(1030)连上来了:
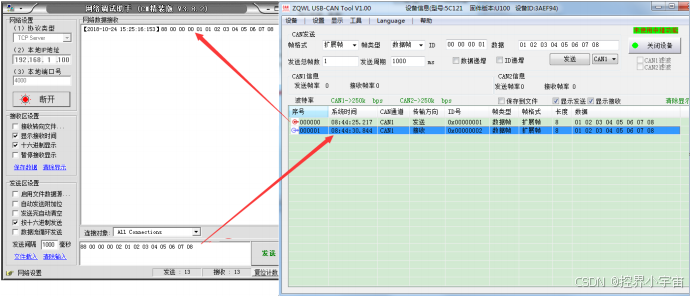
这时就可以和 CAN 做数据透传了:
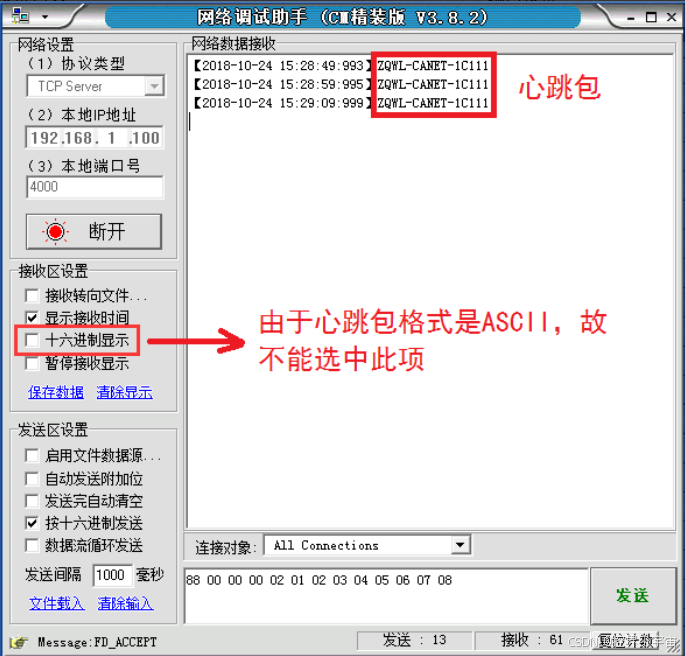
该模式下,可以设置“心跳包数据”和“心跳包间隔”,其含义是:当“心跳包间隔”
不为 0 时,在没有数据透传的情况下,则每隔“心跳包间隔”就会向 TCP 服务器发送“心
跳包数据”。当“心跳包间隔”为 0 时,禁止此功能(出厂参数)。
举例说明,如果“心跳包间隔”设置为 10,则当没有数据透传的情况下,每隔 10 秒向
TCP 服务器发送一包“心跳包数据”,这在连外网(例如域名)时非常有用,因为此种情况
下就不能利用该设备的“本地端口”来区分是哪个设备发来的数据了(本地端口已被路由器
取代)。
将“心跳包间隔”设置为 10,配置好后,重启设备,则在没有数据透传的情况下,TCP
服务器会每隔 10 秒收到一包注册数据:
- UDP_SERVER:需先接收数据才能记录目标 IP,适合多对象通讯;
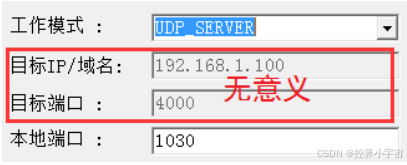
UDP_SERVER 模式下,CAN 数据总是发往最后一个与设备通讯的 UDP 对象(IP 和端
口),并且必须先有对方向设备发数据后,设备才能记录这个 IP 和端口号。
该模式的特点是,CAN 数据可以和不通的 UDP 对象(IP 和端口)通讯。
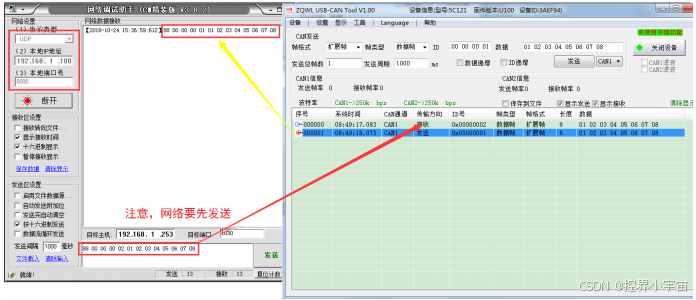
将 CAN 的工作模式配成 UDP_SERVER 模式,保存,重启。
打开网络助手和 CAN 调试软件,在网络助手里,将“协议类型”选择为“UDP”;“本
地 IP 地址”为电脑的 IP(如 192.168.1.100);“本地端口”任意设置(如 8000)。设置好后,
点“连接”,下方则会出现“目标主机”和“目标端口”,分别填上设备的 IP(192.168.1.253)
和 CAN 的“本地端口”:1030。
这时,需要网络助手先发一包数据到 CAN,然后 CAN 发的数据才能传到网络。
- UDP_CLIENT:数据固定发往预设目标,支持广播发送。
该模式下 CAN 数据总是发往预先设置的“目标 IP/域名”和“目标端口”,并且多个 UDP
对象(IP 和端口)都可以将数据发到该设备的 IP 和“本地端口”上,从而转发到该 CAN
口上。
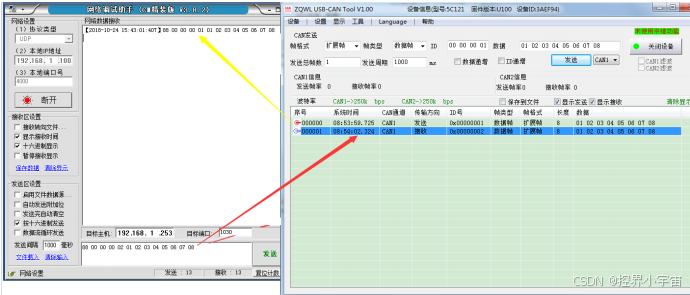
将 CAN 的工作模式配成 UDP_CLIENT 模式,“目标 IP/域名”填上电脑的 IP(如
192.168.1.100),保存,重启。
打开网络助手和 CAN 调试软件,在网络助手里,将“协议类型”选择为“UDP”;“本
地 IP 地址”为电脑的 IP(如 192.168.1.100);“本地端口号”与 CAN 的“目标端口”一致
(4000)。设置好后,点“连接”,下方则会出现“目标主机”和“目标端口”,分别填上设
备的 IP(192.168.1.253)和 CAN 的“本地端口”:1030。
这时,UDP 就可以和 CAN 透传数据了(此种模式不需要 UDP 先发数据,区别于
“UDP_SERVER”模式):
另外,该模式下,支持“目标 IP/域名”为“255.255.255.255”的广播发送。
五、常见问题排查指南
- 搜索不到设备:
- 检查电源指示灯是否常亮,RUN 灯是否 1Hz 频率闪烁
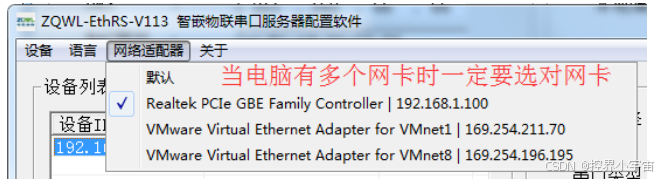
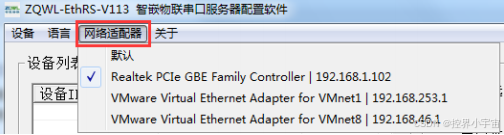
- 确认网线连接正常,配置软件选择正确的网络适配器
2.通讯失败:
- 确保设备与电脑 IP 在同一网段
- 验证 CAN 波特率与连接设备一致
- 检查工作模式配置是否匹配
- 参数修改后需重启设备生效
结语
ZQWL-CANET-1C112 以其工业级的可靠性、灵活的配置方式和丰富的功能特性,为 CAN 总线与以太网的互联提供了高效解决方案。无论是自动化生产线、智能楼宇还是远程监控系统,这款转换器都能成为连接 "过去" 与 "现在" 的关键桥梁,助力工业设备实现智能化升级。