YOLO---04YOLOv3
-
YOLOV3 论文地址::【https://arxiv.org/pdf/1804.02767】
-
YOLOV3 论文中文翻译地址::【YOLO3论文中文版_yolo v3论文 中文版-CSDN博客】
-
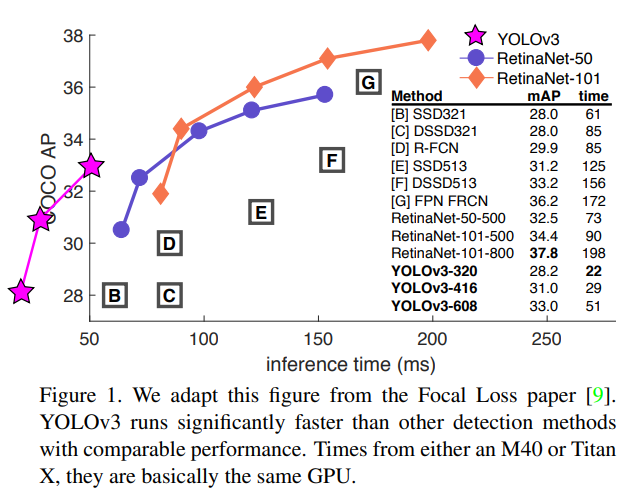
YOLOv3 在实时性和精确性在当时都是做的比较好的,并在工业界得到了广泛应用
-
YOLOv3 改进网络结构,使其更适合小目标检测,改进 softmax,预测多标签任务
-
YOLOv3 最显著的改进就是在 3 个尺度上以相同的方式进行目标的检测,每种 3 个锚框,共 9 个。这使其可以检测到不同规模的目标
1、网络结构
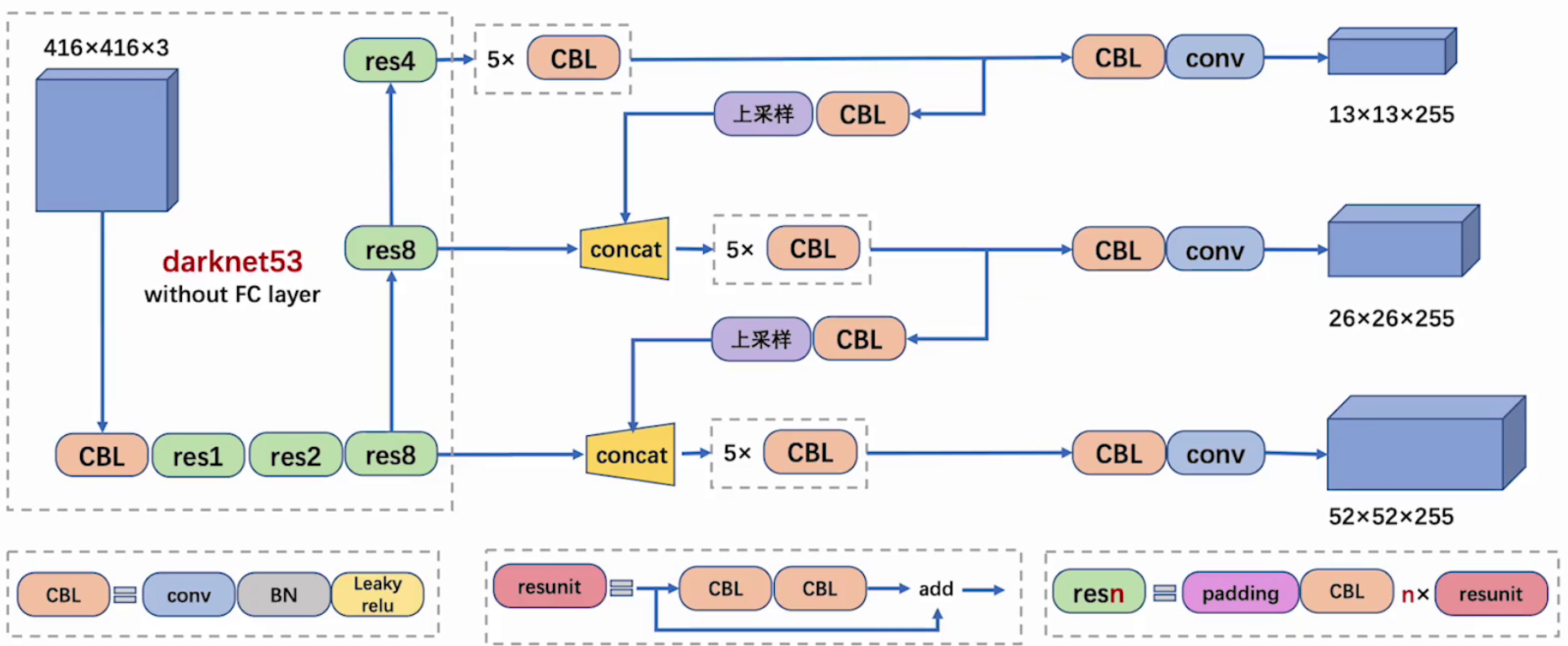
1.1 整体结构
-
CBL:CBL(Convolutional + Batch Normalization + Leaky ReLU)是 Yolov3 网络结构中的最小组件,组成如下:
-
卷积层(Convolutional Layer)
-
批量归一化层(Batch Normalization Layer)
-
激活函数(Leaky ReLU)
-
-
resunit:含有多个 CBL,残差模块中含有一个或多个残差单元。输入通过两个 CBL 后,再与原输入进行 add;这是一种常规的残差单元。残差单元的目的是为了让网络可以提取到更深层的特征,同时避免出现梯度消失或爆炸
-
梯度消失是指在反向传播过程中,梯度值变得非常小,以至于权重更新几乎停滞不前
-
梯度爆炸是指在反向传播过程中,梯度值变得非常大,导致权重更新幅度过大,从而使模型的训练不稳定甚至发散
-
-
resn:resn 是 Yolov3 中的大组件,n 表示这个 Res-block 里含有多少个 Res-unit,组成如下:
-
一个 padding
-
一个 CBL
-
N 个残差组件
-
-
concat:将 Darknet-53 的中间层和后面的某一层的上采样进行张量拼接,达到多尺度特征融合的目的。这与残差层的 add 操作是不一样的,拼接会扩充张量维度,而 add 直接相加不会导致张量维度的改变,例如 104×104×128 和 104×104×128 拼接,结果是 104×104×256
-
add:张量相加,张量直接相加,不会扩充维度,例如 104×104×128 和 104×104×128 相加,结果还是 104×104×128
-
上采样:上采样(Upsampling)是一个关键的技术,用于实现多尺度特征融合,从而提高模型对不同尺度目标的检测能力
-
多尺度特征融合:YOLOv3 在多个尺度上进行目标检测,通过上采样将低分辨率的特征图放大到高分辨率,与更高分辨率的特征图进行融合,从而捕捉到更多的细节信息,有助于模型更好地检测不同尺度的目标,尤其是小目标
-
-
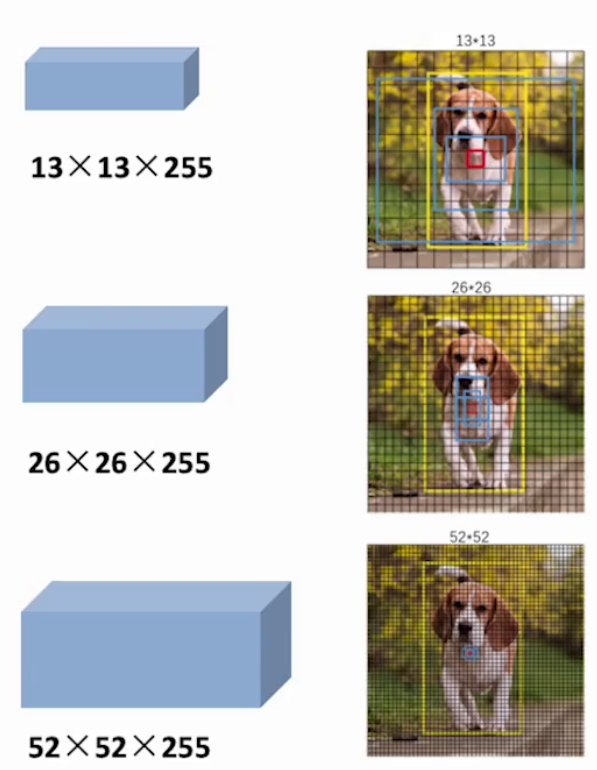
255 = 3 x (4+1+80)
-
最后面的蓝色立方体表示三种尺度的输出
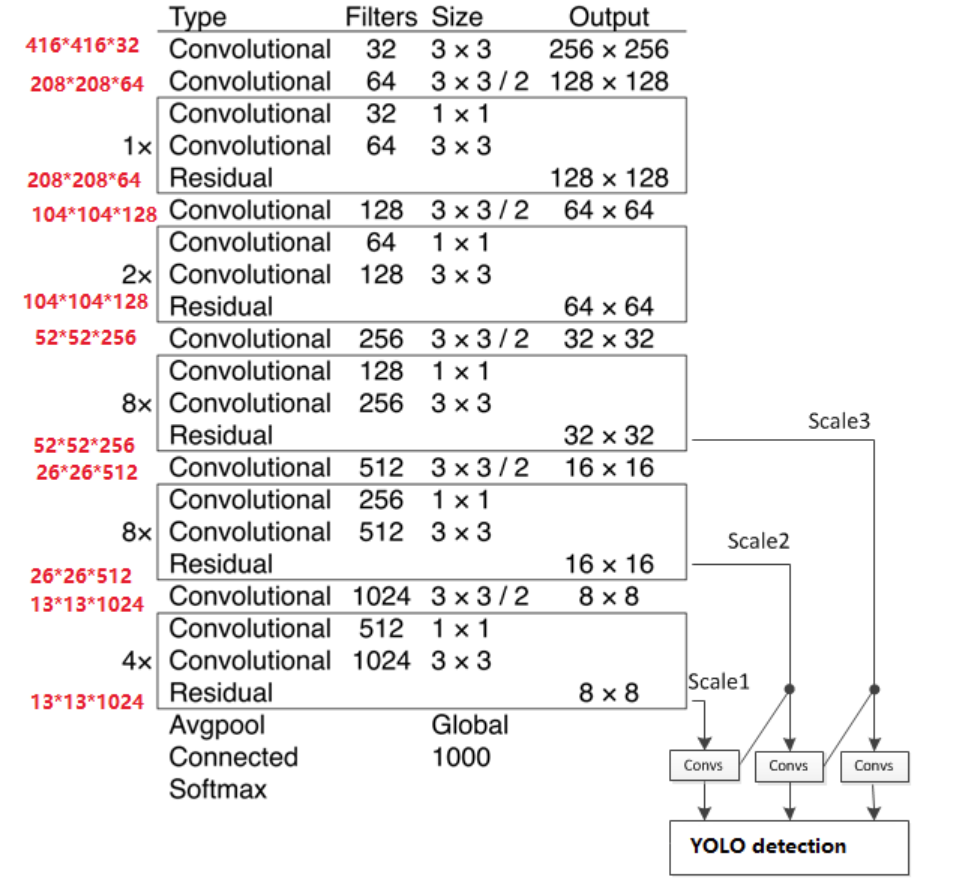
1.2 主干网络
-
YOLOV3 主干结构采用 darknet-53,没有池化和全连接层,尺寸变换是通过 Stride 实现的
-
整个网络主要包括
5组残差块,如下:-
以
256x256输入为例,首先经过一个3x3x32的卷积层输出为256x256x32 -
接着经过一个
3x3x64 stride=2的卷积层输出为128x128x64 -
接着经过一个残差块,输出为
128x128x64 -
再经过一个
3x3x128 stride=2的卷积层输出为64x64x128 -
经过
2个残差块后输出为64x64x128 -
接着经过一个
3x3x256 stride=2的卷积层输出为32x32x256 -
接着经过
8个残差块,输出为32x32x256 -
再经过一个
3x3x512 stride=2的卷积层输出为16x16x512 -
接着经过
8个残差块后输出为16x16x512 -
接着经过一个
3x3x1024 stride=2的卷积层输出为8x8x1024 -
接着经过
4个残差块后输出为8x8x1024 -
最后经过池化全连接层以及
softmax输出
-
1.3 特征输出
-
特征图尺寸越小,感受野越大,他们分别适配不同大小的目标:
-
52 × 52 感受野小,更适合检测小型目标
-
26 X26 感受野中等,更适合检测中小型目标
-
13 × 13 感受野大,更适合检测大型目标
-
1.4 特征融合
1.4.1 FPN思想
-
在目标检测任务中,不同尺度的目标(如远处的小人和近处的大车)对特征提取的要求不同:
-
大目标:需要高层语义信息(如类别、整体形状)
-
小目标:需要低层细节信息(如边缘、纹理)
-
-
传统的单尺度特征提取网络(如 YOLOv2)往往只使用最后一层特征图进行预测,对小目标检测效果较差
-
FPN(Feature Pyramid Network),就是特征金字塔网络,目标是:融合多尺度特征,使每个尺度的特征图都具备丰富的语义信息,从而提升对不同尺度目标的检测能力,尤其是小目标
-
FPN 的主要思想如下:
-
特征提取:使用骨干网络(如 ResNet、Darknet-53 等)提取不同尺度的特征图。这些特征图通常有不同的分辨率,例如 13x13、26x26 和 52x52
-
自顶向下路径:从最高层的特征图开始,逐层进行上采样,并与下一层的特征图进行拼接,通过 CBL 模块对拼接后的特征图进行进一步处理,作用是将高层语义信息“传递”到低层,增强低层特征的语义表达能力
-
横向连接:在每个尺度上,将自顶向下路径的特征图与同尺度的骨干网络输出特征图进行通道拼接(Concatenate),作用是融合低层的细节信息 + 高层的语义信息,提升多尺度检测能力
-
特征融合:在每个尺度的横向连接后,使用一个 CBL 模块(Conv + BN + Leaky ReLU) 或普通卷积层,对拼接后的特征图进行进一步处理,通常使用 3×3 卷积进行特征融合,作用是增强特征表达能力,减少信息冗余
-
-
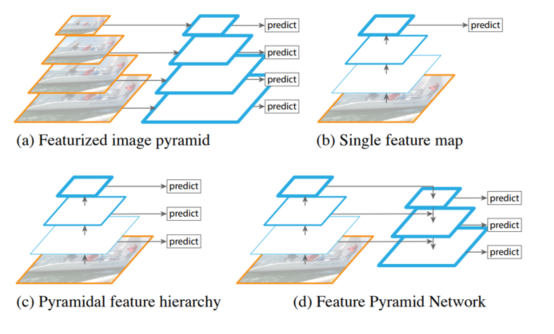
观察下面四张图:
-
图 a:特征化图像金字塔
-
当我们要检测不同的尺度目标时,需要把图像送入不同的尺度
-
需要根据不同的尺度图片一次进行预测
-
需要多少个不同尺度就需要预测多少次,效率较低
-
-
图 b:单特征映射
-
得到一个特征图并进行预测
-
特征丢失,对于小目标效果不好
-
-
图 c:金字塔特征层次结构
-
把图像传给 backbone,在传播的过程中分别进行预测
-
相互之间独立,特征没有得到充分利用
-
-
图 d:特征金字塔网络
-
不是简单的在不同特征图上进行预测
-
会对不同的特征图进行融合后再进行预测
-
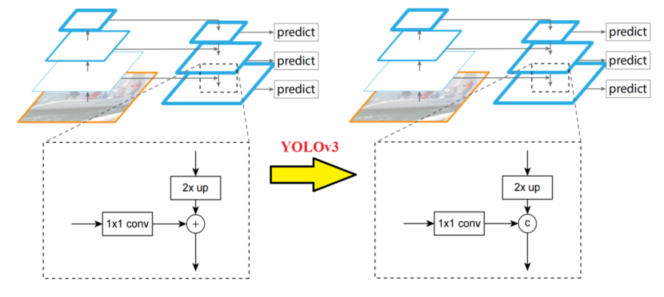
1.4.2 FPN融合
-
和前面描述的一样,为了进一步降低模型的复杂度进而提升速度,YOLOv3 选择了重用主干网络所提取的不同尺寸的特征图,主要是 8 倍、16 倍以及 32 倍下采样的特征图,同时采用了 FPN 的设计思想,分别对 16 倍、32 倍以及各自上采样后的结果进行了融合,但是也对其进行了一定的改进,在传统的 FPN 中,特征图通常是通过 加法(Add) 来进行融合的。但在 YOLOv3 中,作者选择使用 通道拼接(Concatenate) 来代替加法操作,这是为了:
-
增加特征图的通道数:使得模型能够捕捉到更多的信息
-
避免信息丢失:加法操作可能会导致某些重要信息被掩盖,而拼接则保留了所有原始信息
-
-
1×1 卷积完成通道的一致性
-
2×up(上采样)完成尺寸的一致性
1.4.3 上采样融合
-
特征融合更有利于检测各种尺寸的物体,下图是特征融合架构图:
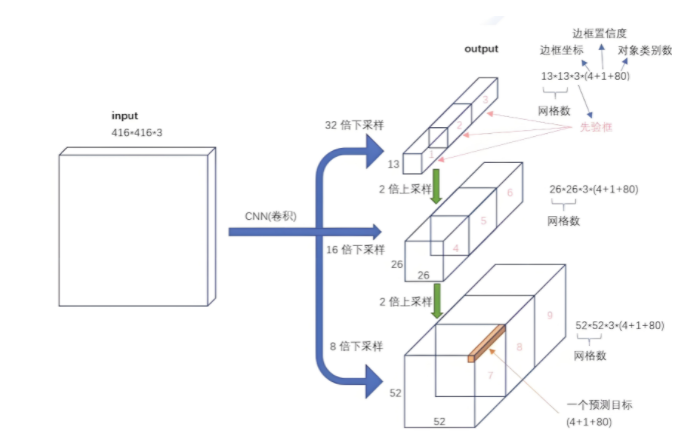
2、多尺度预测
-
如果输入的是 416×416x3 的图像,YOLOv3 会产生 3 个尺度的特征图,分别为:13×13、26×26、52×52,也对应着网格个数,即总共产生 13×13+26×26+52×52 个网格。对于每个网格,对应 3 个锚框,于是,最终产生了(13×13+26×26+52×52)×3=10647 个预测框,利用阈值过滤掉置信度低于阈值的预选框,每个网格同样最终只预测一个结果,取置信度最大的
-
在 COCO 数据集上,YOLOv3 使用了 9 种不同形状的 Anchor Box,这 9 个 Anchor Box 被分配到三个不同的尺度中,每个尺度使用其中的 3 个来匹配适合该尺度的目标大小。具体来说:
-
13×13 特征图:适用于较大的目标,因为这个尺度的特征图感受野较大,能够捕捉到更全局的信息
-
26×26 特征图:适用于中等大小的目标
-
52×52 特征图:适用于较小的目标,因为这个尺度的特征图分辨率更高,能捕捉到更多细节
-

-
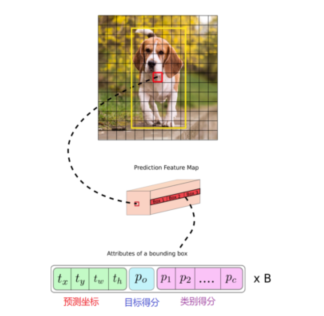
对于每个网格,其都对应一个 85 维度的 Tensor(80 + 5)
-
5=4+1:中心点坐标、宽、高,置信度
-
80:80 个类别的类别概率(COCO数据集的类别是80个)
-
3、类别预测
-
在有的数据集中,一个目标可能同时具有多个标签(如“女性”和“人”)。使用 softmax 会隐式地假设每个边界框只属于一个类别,而现实中这种情况并不总是成立。因此,多标签分类的方式更符合实际数据分布,能够更好地建模多类别共存的场景
-
YOLOv3 使用独立的逻辑回归分类器代替 softmax,采用多标签分类方式处理类别预测,这种设计更适合现实场景中目标类别重叠的情况,提升了模型对复杂任务的适应能力
4、损失函数
-
YOLOv3 的损失函数由三个主要部分组成:定位损失(Localization Loss)、置信度损失(Confidence Loss)和分类损失(Classification Loss)
-
定位误差损失:对于每一个与真实边界框(ground truth)匹配的先验框(anchor box),YOLOv3 会计算其在位置(x, y)和尺寸(w, h)上的预测误差。该部分损失采用均方误差(Mean Squared Error, MSE)进行计算。需要注意的是,YOLOv3 仅对负责预测目标的 anchor box 计算定位损失,其余框不参与该部分损失的计算
-
置信度误差损失:YOLOv3 使用二元交叉熵损失(Binary Cross Entropy, BCE)来计算置信度损失。该损失分为两个部分:
-
对于负责预测目标的 anchor box,置信度的目标值为预测框与真实框之间的 IOU
-
对于不负责预测的 anchor box,目标值为 0。 这种设计有助于模型学习区分包含目标与不包含目标的边界框
-
-
分类误差损失:与早期版本不同,YOLOv3 放弃了使用 softmax 的多类分类方式,转而采用独立的二元分类器,并对每个类别使用二元交叉熵损失(Binary Cross-Entropy Loss)。这种多标签分类的设计允许一个边界框同时属于多个类别(如“女性”和“人”),从而更好地建模现实世界中复杂的标签重叠情况
-
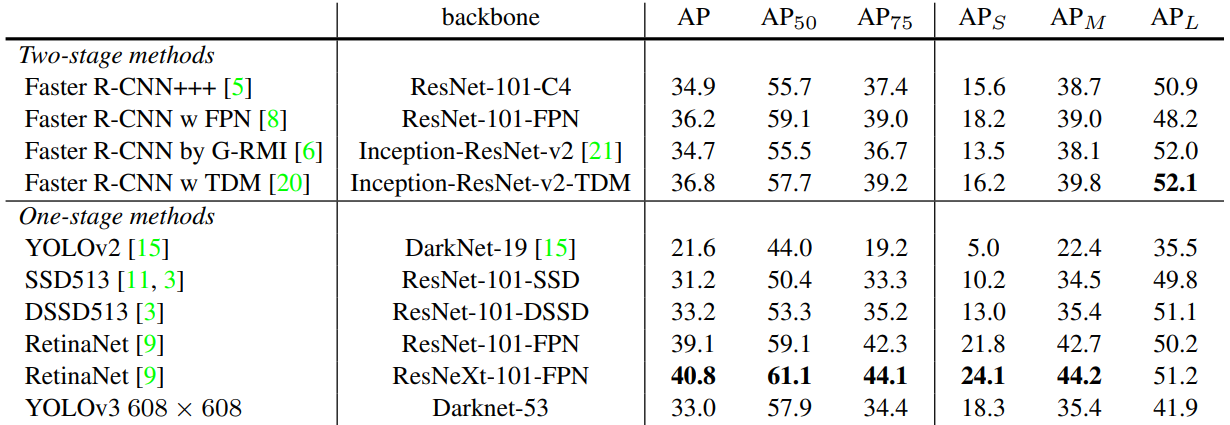
5、性能对比
-
AP50:IoU 阈值为 0.5 时的 AP 测量值
-
AP75:IoU 阈值为 0.75 时的 AP 测量值
-
APs:对于小目标的 AP 值
-
APm:对于中等目标的 AP 值
-
APL:对于大目标的 AP 值