【01】大恒相机SDK C++开发 —— 初始化相机,采集第一帧图像、回调采集、关闭相机
文章目录
- 1 初始化相机,采集第一帧图像
- 2 回调方式采集图像
- 3 视频教程
1 初始化相机,采集第一帧图像
#include <iostream>
#include <GalaxyIncludes.h>
using namespace std;int main()
{//首先,对相机资源进行初始化IGXFactory::GetInstance().Init();//第二部,枚举相机//先定义一个设备列表,用来存放枚举到的设备GxIAPICPP::gxdeviceinfo_vector cam_list;//枚举同一网段下的相机 无ALLIGXFactory::GetInstance().UpdateDeviceList(1000,cam_list);//枚举同一网络下所有相机 有ALL//IGXFactory::GetInstance().UpdateAllDeviceList(1000, cam_list);//打印设备的SN码、设备名称、制造商//枚举到相机后,就可以获取到相机的一些设备信息int cam_num = cam_list.size();GxIAPICPP::gxstring sn = cam_list[0].GetSN();GxIAPICPP::gxstring id = cam_list[0].GetDeviceID();GxIAPICPP::gxstring cmpy = cam_list[0].GetVendorName();std::cout << "检测到 " << cam_num << " 台相机 \r\n";std::cout << "SN码: " << sn << "\r\n";std::cout << "相机ID: " << id << "\r\n";std::cout << "制造商: " << cmpy << "\r\n";//打开相机,可以通过IP、SN、MAC、ID等唯一标识符打开相机//这里通过SN打开相机,打开相机的方式有三种: 只读、控制、独占CGXDevicePointer cam = IGXFactory::GetInstance().OpenDeviceBySN(sn,GX_ACCESS_MODE::GX_ACCESS_CONTROL);//控制方式打开//打开相机后,准备开始采集图像//首先打开流通道CGXStreamPointer cam_stream = cam->OpenStream(0);//默认打开第一个流通道//获取远端属性控制器CGXFeatureControlPointer cam_remote_control = cam->GetRemoteFeatureControl();//流通道开始采集cam_stream->StartGrab();//发送开采命令cam_remote_control->GetCommandFeature("AcquisitionStart")->Execute();//采集一帧图像CImageDataPointer img = cam_stream->GetImage(1000);//采集超时时间ms//获取并打印图像宽高uint16_t height = img->GetHeight();uint16_t width = img->GetWidth();std::cout << "图像高: " << height << "\t宽:"<<width<<"\r\n";return 0;}
2 回调方式采集图像
#include <iostream>
#include <GalaxyIncludes.h>
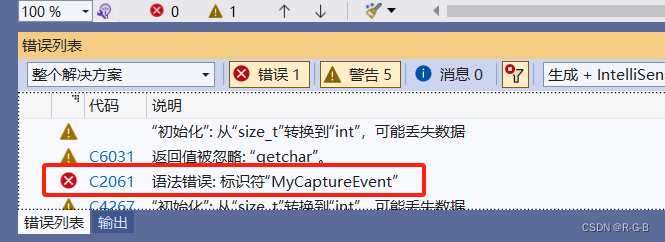
using namespace std;//注意:回调函数要放在main函数之前,否则报错//首先创建一个回调函数
//创建一个类,集成回调事件类int main()
{//对回调函数进行注册//声明采集回调事件的对象指针,并且创建指针对象ICaptureEventHandler* pCaptureHandler = NULL;pCaptureHandler = new MyCaptureEvent();//对相机资源进行初始化IGXFactory::GetInstance().Init();//第二部,枚举相机//先定义一个设备列表,用来存放枚举到的设备GxIAPICPP::gxdeviceinfo_vector cam_list;//枚举同一网段下的相机 无ALLIGXFactory::GetInstance().UpdateDeviceList(1000,cam_list);//枚举同一网络下所有相机 有ALL//IGXFactory::GetInstance().UpdateAllDeviceList(1000, cam_list);//打印设备的SN码、设备名称、制造商//枚举到相机后,就可以获取到相机的一些设备信息int cam_num = cam_list.size();GxIAPICPP::gxstring sn = cam_list[0].GetSN();GxIAPICPP::gxstring id = cam_list[0].GetDeviceID();GxIAPICPP::gxstring cmpy = cam_list[0].GetVendorName();std::cout << "检测到 " << cam_num << " 台相机 \r\n";std::cout << "SN码: " << sn << "\r\n";std::cout << "相机ID: " << id << "\r\n";std::cout << "制造商: " << cmpy << "\r\n";//打开相机,可以通过IP、SN、MAC、ID等唯一标识符打开相机//这里通过SN打开相机,打开相机的方式有三种: 只读、控制、独占CGXDevicePointer cam = IGXFactory::GetInstance().OpenDeviceBySN(sn,GX_ACCESS_MODE::GX_ACCESS_CONTROL);//控制方式打开//打开相机后,准备开始采集图像//首先打开流通道CGXStreamPointer cam_stream = cam->OpenStream(0);//默认打开第一个流通道//获取远端属性控制器CGXFeatureControlPointer cam_remote_control = cam->GetRemoteFeatureControl();//注册回调函数cam_stream->RegisterCaptureCallback(pCaptureHandler,NULL);//流通道开始采集cam_stream->StartGrab();//发送开采命令cam_remote_control->GetCommandFeature("AcquisitionStart")->Execute();//采集一帧图像//CImageDataPointer img = cam_stream->GetImage(1000);//采集超时时间ms//当还在采集主函数就执行完毕了,会报错,加一个阻塞getchar();//采集完毕,停止采集,关闭相机//远端属性控制器发送停止命令cam_remote_control->GetCommandFeature("AcqisitionStop")->Execute();//流通道停止采集cam_stream->StopGrab();//流通道关闭cam_stream->Close();//相机关闭cam->Close();//然后释放我们所有的相机资源IGXFactory::GetInstance().Uninit();return 0;}class MyCaptureEvent : public ICaptureEventHandler
{
public:void DoOnImageCaptured(CImageDataPointer& img, void* userparam){//获取并打印图像宽高uint16_t height = img->GetHeight();uint16_t width = img->GetWidth();std::cout << "图像高: " << height << "\t宽:" << width << "\r\n";}};
//注意:回调函数要放在main函数之前,否则报错
3 视频教程
【大恒工业相机SDK开发C++版】初始化相机,采集第一帧图像