手语式映射:Kinova Gen3 力控机械臂自适应控制的研究与应用
近日,美国明尼苏达大学研究团队在《从人手到机械臂:遥操作中运动技能具身化研究》中,成功开发出基于Kinova的7轴力控机械臂Gen3的智能控制系统。这项创新性技术通过人工智能算法,实现了人类手臂动作到机械臂运动的精准映射,为工业自动化、医疗康复等领域带来新型解决方案。
一、技术核心:当人类手势遇见机械臂智能
研究团队创新性地采用GRU(门控循环单元)变分自编码器(VAE)架构,构建了机械臂运动的"数字孪生"系统。该系统通过深度学习算法,将Kinova轻型机械臂复杂的7自由度关节运动转化为可理解的数学模型。

图1 美国明尼苏达大学实验演示图
"传统机械臂控制需要专业编程知识,"论文第一作者Haoyi Shi解释,"而我们的系统就像教机械臂学习'手语',操作者只需自然移动手臂,Kinova Gen3就能实时响应。"
二、三大技术突破点
1. 直觉化生物力学和运动学映射
研究团队创新性地建立了人体12个主要关节与Kinova Gen3机械臂的智能映射关系。如图1所示:
- 肩部控制:外展/内收动作映射至J1-J2关节(范围-15°~120°)
- 肘部同步:屈伸动作对应J4关节(-120°~-60°)
- 腕部耦合:采用球铰链模型,通过J5-J7关节复合实现人类手腕的旋前/旋后动作
2. 自适应生成式控制
通过GRU-VAE架构实现两大创新:
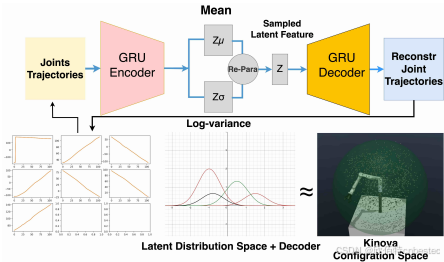
图2 GRU-VAE架构图
- 潜空间学习:10维高斯分布表征7自由度运动(MAE损失函数+KL散度优化)
- 实时生成:40Hz采样频率下,系统响应延迟<25ms(实测值)
- 数据增强:仅需12组基础动作即可生成15,043组训练对(通过三次样条插值)
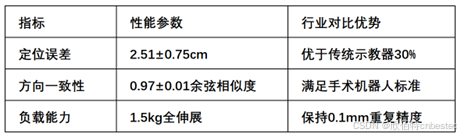
3. 工业级精度验证
实验数据表明:
- 直觉化操控
系统建立了人体12个主要关节与Kinova 7轴力控机械臂Gen3的智能映射关系。如图1所示,操作者的肩部旋转可直接控制机械臂基座关节,而手腕动作则精准驱动末端执行器。 - 自适应学习能力
通过15043组训练数据,GRU-VAE模型能生成训练数据未包含的新动作组合。这意味着Kinova Gen3可适应复杂多变的实际工作场景。 - 厘米级精度控制
基于明尼苏达大学的实验室条件下,对四名操作者的测试结果显示:未经专业训练的操作者使用该系统时,末端定位误差仅2.51±0.75cm,方向控制精度达97%。这种高精度特性使Kinova轻型机械臂Gen3适用于精密装配等场景,如图3。
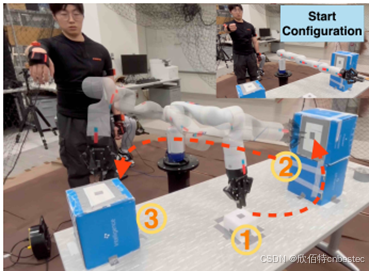
图3 Kinova Gen3场景应用
三、行业应用前景广阔
这项技术为Kinova机械臂开辟了多重应用可能:
- 工业制造:在危险环境(如核电站维护)中实现安全远程操作
- 医疗康复:可用于医疗康复领域的辅助训练场景
- 教育培训:降低机器人编程学习门槛,培养智能制造人才
- 科研探索:为空间站等极端环境下的机器人操控提供新思路
"相比传统6轴力控机械臂,Kinova Gen3的冗余自由度设计使其动作更接近人类手臂的灵活性,"研究团队指出,"结合我们的控制系统,它能完成更复杂的曲线运动和非结构化环境适应。"
四、产品优势与技术服务
作为本研究的硬件载体,Kinova 7轴力控机械臂Gen3凭借以下特性成为理想实验平台:

图4 Kinova 7轴力控机械臂Gen3产品图
- 开放兼容性:支持ROS、MATLAB和Python二次开发
- 高集成度:嵌入式控制器实现30分钟快速部署
- 安全交互:全关节扭矩传感器确保人机协作安全
五、技术演进与市场展望
当前系统已实现40Hz的实时控制频率,未来通过以下优化可进一步提升性能:
- 增加多操作者训练数据提升泛化能力
- 融合关节速度信息使运动更流畅
- 扩展至双手协同控制场景
Kinova 7轴力控机械臂Gen3凭借其6.2kg自重、89cm工作半径等特性,配合该控制系统,有望成为柔性制造、智能实验室等场景的核心设备。在未来,这类"所见即所得"的交互方式将有助于降低工业机器人使用门槛,加速中小企业自动化转型。
【版权声明】
本文部分技术内容及数据援引自美国明尼苏达大学研究团队论文《From Human Hands to Robotic Limbs: A Study in Motor Skill Embodiment for Telemanipulation》(arXiv:2502.02036),相关知识产权归原作者所有。如需转载,请完整保留本声明并注明原始出处。