商场导航软件:3D+AI 基于Deepseek 模型的意图识别技术解析
本文面向室内导航工程师、商场导航系统优化师及LBS 应用开发的技术员,解析商场室内导航系统 3D+AI 三大核心技术模块,并提供可直接复用的工程解决方案。
如需获取商场导航系统技术方案可前往文章最下方获取,如有项目合作及技术交流欢迎私信作者。
一、技术背景:商场导航的技术挑战
商场作为典型的复杂室内场景,导航面临三大技术难题:
- 空间认知障碍:多层立体结构导致 2D 地图难以理解,用户难以建立空间关联
- 语义理解鸿沟:用户自然语言搜索词语与现有POI数据难以匹配
- 定位场景割裂:室内外信号环境差异大,室内外导航信号切换易断联
以下从技术层面对 3D+AI 融合方案进行拆解:
二、3D 地图空间构建
3D 地图核心在于空间数据数字化重建,技术流程包括:
- 数据采集:通过激光雷达(LiDAR)扫描商场空间,获取点云数据。
- 模型构建:基于 Three.js 引擎实现轻量化3D建模,保留商铺、电梯、通道等关键空间要素,实现物理空间坐标与虚拟空间坐标的精准映射。
- 数据优化:根据设备性能动态调整模型精度,实现1:1复刻。

相关核心代码示例:
// 3D地图初始化核心代码(伪代码)
const mapScene = new THREE.Scene();
const loader = new GLTFLoader();
// 加载轻量化模型(glTF格式)
loader.load('mall_3d_model.glb', (gltf) => {scene.add(gltf.scene);// 绑定交互事件(如点击商铺显示详情)gltf.scene.traverse(child => {if (child.isMesh && child.name.includes('shop')) {child.addEventListener('click', showShopInfo);}});
});三、AI 语义导航分析
3.1自然语言处理流程
高度集成 Deepseek 大模型构建语义理解数据库:
- 意图识别:通过AI微调模型识别用户核心需求(如 “购物”“找设施”“餐饮”)
- 实体链接:将模糊搜索意图与商场POI数据库中的具体品牌店关联
- 上下文建模:支持多轮对话,集成推荐目的地。

3.2技术亮点
- 实时路线规划:结合Dijkstra算法,匹配店铺后动态生成最优路径。
相关核心代码示例:
# 基于DeepSeek-7B的意图分类微调
from transformers import AutoTokenizer, AutoModelForSequenceClassificationtokenizer = AutoTokenizer.from_pretrained("deepseek-ai/deepseek-llm-7b")
model = AutoModelForSequenceClassification.from_pretrained("checkpoints/mall_navigator_v2",num_labels=12 # 导航意图类别数
)def predict_intent(query):inputs = tokenizer(query, return_tensors="pt", max_length=64, truncation=True)outputs = model(**inputs)return ["店铺导航", "设施查询", "活动定位"][outputs.logits.argmax()]四、室内外一体化导航
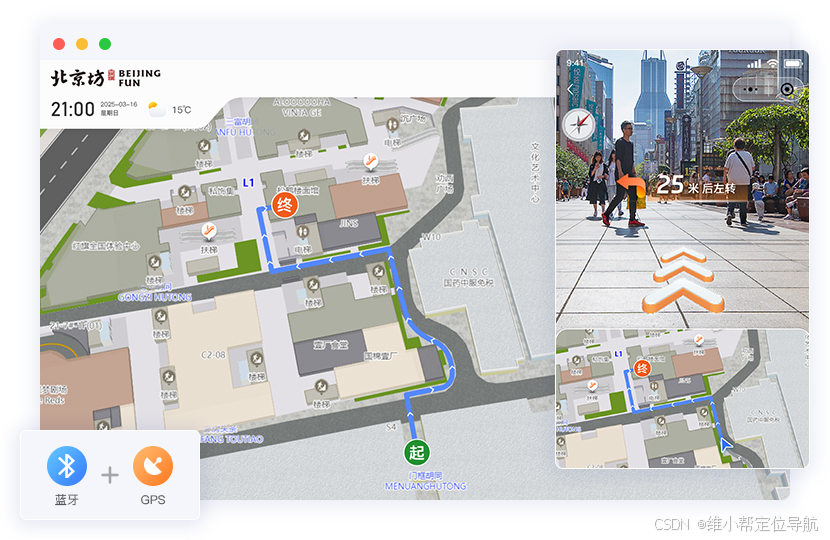
4.1多源融合定位方案
场景 | 定位技术 | 精确度 |
室外 | GPS + 北斗双模定位 | 3~5米 |
室内外入口 | GPS + 蓝牙 Beacon 融合 | 3~5米 |
室内 | 蓝牙 iBeacon定位 | 1~3米 |
4.2 技术亮点
- 无缝切换:融入卡尔曼滤波算法,当检测GPS 信号强度低于一定阈值时,自动切换至室内定位模式,确保导航轨迹连贯。
五、总结
商场导航软件的3D+AI方案,通过空间数字化、需求智能化、定位无缝化破解室内导航难题,这套技术方案不仅适用于商场场景,其还可复用于机场、展馆、大型综合体等复杂室内环境,为室内导航领域提供了可复用的技术框架。
如需商场导航系统技术方案可前往↓