RCW(Rear Collision Warning)后向碰撞预警功能介绍
RCW(Rear Collision Warning)后向碰撞预警功能介绍
RCW功能
自车行驶过程中对后方车辆进行监测,当后方车辆将会与自车发生碰撞时产生报警,用以警告后方车辆采取紧急行动以避免碰撞。
原理
通过后Radar探测后方车辆,当后方车辆车速较快,可能会与自车发生追尾事故时,自车发出警示音,并在组合仪表上显示警示信息,提醒驾驶员可能发生追尾,同时危险警告灯快速闪烁,警示后方车辆保持安全距离。
法规
- 文件:紧急制动灯ESS法规要求
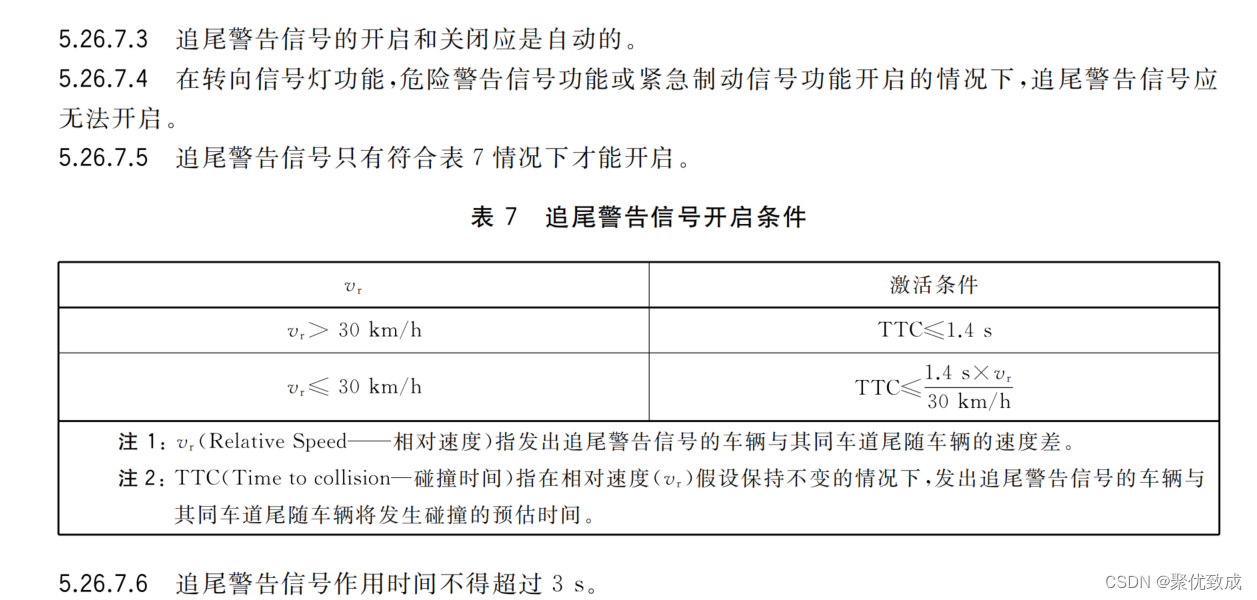
激活条件
- 车辆启动且处于非R/P档,RCW功能开启
- 当与后车速度差>30km/h时, 如TTC≤1.4s,激活RCW;
- 当与后车速度差≤30km/h时, 如TTC≤1.4s×相对速度/30,激活RCW
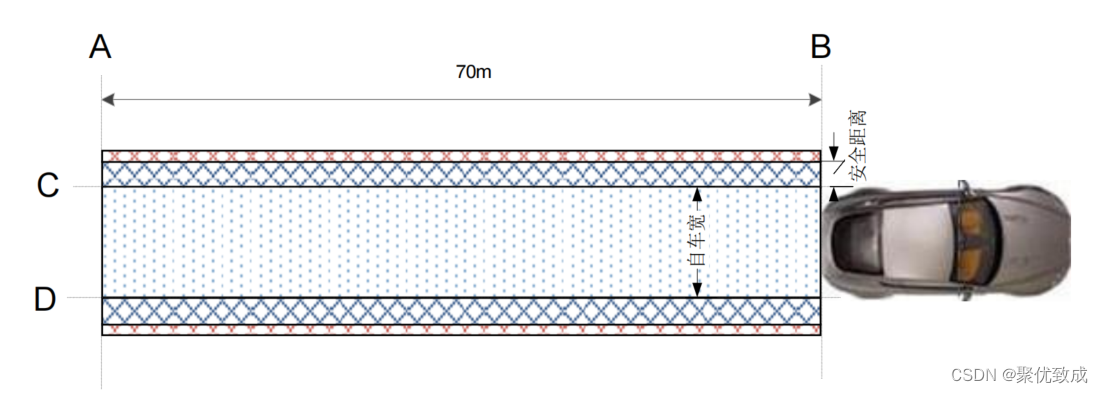
报警区域
- 横向:-(1/2车宽+0.5)m ~ (1/2车宽+0.5)m
- 纵向:-70m ~ 0m
- 区域:是否有统一标准???实际是否为可调整的?
效果要求
- 通过同时点亮所有转向信号灯来实现
- 作用时间不超过3s,点亮优先级低于转向灯、危险警告灯、紧急制动灯
参考链接
- https://blog.csdn.net/qq_29350001/article/details/134667637
- https://blog.csdn.net/Aliven888/article/details/142454638
- https://www.auto-testing.net/news/show-117699.html