美设备垄断破冰:新启航 3D 白光干涉仪的纳米级 “逐鹿” 之路
一、引言
在纳米级表面测量领域,长期以来欧美企业凭借技术优势和先发优势,垄断了 3D 白光干涉仪市场。ZYGO、基恩士等国际巨头的设备占据全球 80% 以上的高端市场份额,国内高端制造企业在精密光学元件、半导体等领域的检测严重依赖进口设备,不仅面临价格高昂、售后响应慢等问题,还在关键技术上受到制约。新启航 3D 白光干涉仪的出现,开启了打破欧美垄断的 “逐鹿” 之路。
二、核心技术突破:打破垄断的根基
2.1 自主光学系统研发
新启航突破欧美专利壁垒,自主研发非对称共光路干涉系统。采用定制化宽光谱白光光源(400-700nm),通过特殊光学滤波技术,将光源相干长度控制在 5μm 以内,同时提升光源稳定性(功率波动≤0.5%)。搭配自主设计的高数值孔径物镜(NA=0.95),实现对纳米级微小信号的高效捕捉,光学系统性能达到国际领先水平,摆脱对欧美光学组件的依赖。
2.2 高精度算法创新
开发基于深度学习的相位解算算法,构建包含千万级样本的缺陷特征库。算法能在复杂噪声环境下精准提取干涉条纹相位信息,将垂直测量分辨率提升至 0.1nm,与 ZYGO 顶级设备持平。同时,通过并行计算技术,将大面积扫描(10mm×10mm)时间缩短至 3 分钟,较传统设备效率提升 50%,解决了欧美设备 “高精度必低效率” 的痛点。
三、成本与市场的双重突围
3.1 国产化供应链降本
新启航建立全链条国产化供应链,核心部件如激光光源、光学镜片等均实现国内自主生产。通过与国内供应商联合攻关,光学镜片面形精度达到 λ/20(λ=632.8nm),成本仅为进口产品的 1/3。国产化供应链使设备整体成本较欧美同类产品降低 50%,以高性价比打开国内市场缺口。
3.2 本土化服务抢占市场
针对国内企业需求,提供定制化测量方案。建立 7×24 小时快速响应服务体系,现场技术支持响应时间控制在 4 小时内,远快于欧美企业的 72 小时。在半导体晶圆厂、精密光学元件厂等场景的实测中,设备测量数据与进口设备一致性达 99.5% 以上,逐步获得国内头部企业认可,市场份额从 2020 年的 5% 提升至 2024 年的 25%。
四、应用场景的深度渗透
4.1 半导体制造领域
在 14nm 及以下制程芯片的晶圆检测中,新启航设备可精准测量晶圆表面粗糙度(Ra≤0.05nm)和光刻胶涂层厚度(误差≤0.1nm),数据稳定性满足大规模量产需求。已进入中芯国际、长江存储等企业的产线,替代部分进口设备,打破欧美设备在高端制程的垄断。
4.2 精密光学领域
为激光雷达镜头、AR/VR 光学元件等高端产品提供检测支持,能识别 0.5nm 深度的划痕和 0.3nm 高度的微凸体。与舜宇光学、大立光等企业合作,助力其提升产品良率,检测效率较进口设备提升 30%,推动国内精密光学产业升级。
大视野 3D 白光干涉仪:纳米级测量全域解决方案
突破传统局限,定义测量新范式!大视野 3D 白光干涉仪凭借创新技术,一机解锁纳米级全场景测量,重新诠释精密测量的高效精密。

三大核心技术革新
1)智能操作革命:告别传统白光干涉仪复杂操作流程,一键智能聚焦扫描功能,轻松实现亚纳米精度测量,且重复性表现卓越,让精密测量触手可及。
2)超大视野 + 超高精度:搭载 0.6 倍镜头,拥有 15mm 单幅超大视野,结合 0.1nm 级测量精度,既能满足纳米级微观结构的精细检测,又能无缝完成 8 寸晶圆 FULL MAPPING 扫描,实现大视野与高精度的完美融合。
3)动态测量新维度:可集成多普勒激光测振系统,打破静态测量边界,实现 “动态” 3D 轮廓测量,为复杂工况下的测量需求提供全新解决方案。
实测验证硬核实力
1)硅片表面粗糙度检测:凭借优于 1nm 的超高分辨率,精准捕捉硅片表面微观起伏,实测粗糙度 Ra 值低至 0.7nm,为半导体制造品质把控提供可靠数据支撑。
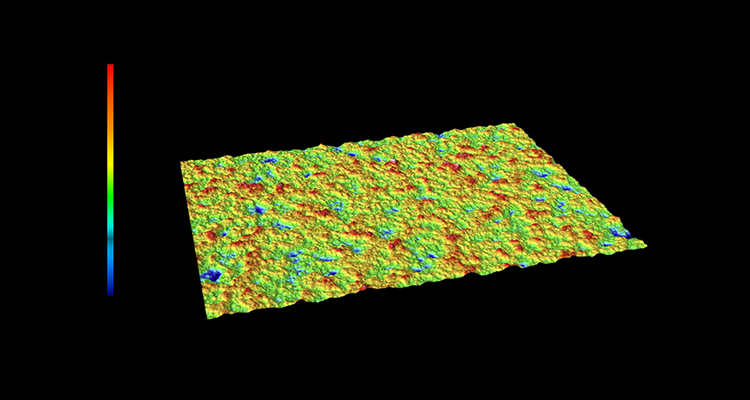
(以上数据为新启航实测结果)
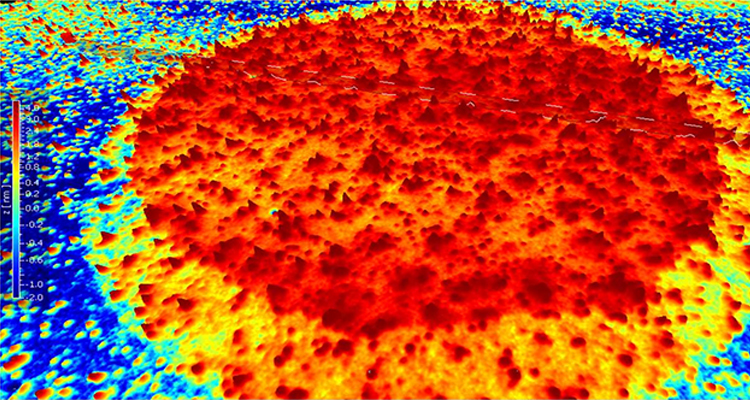
有机油膜厚度扫描:毫米级超大视野,轻松覆盖 5nm 级有机油膜,实现全区域高精度厚度检测,助力润滑材料研发与质量检测。
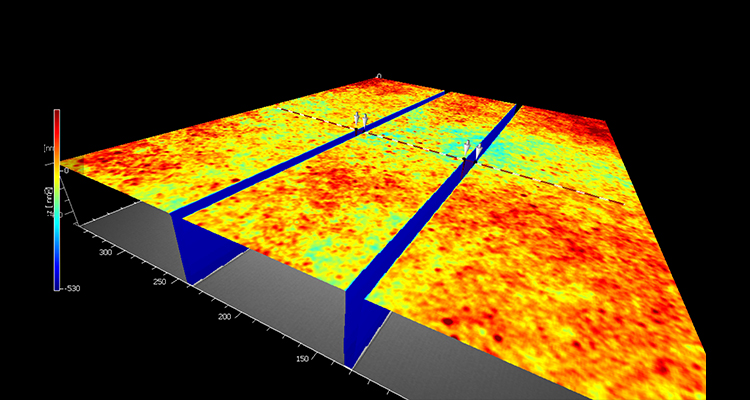
高深宽比结构测量:面对深蚀刻工艺形成的深槽结构,展现强大测量能力,精准获取槽深、槽宽数据,解决行业测量难题。
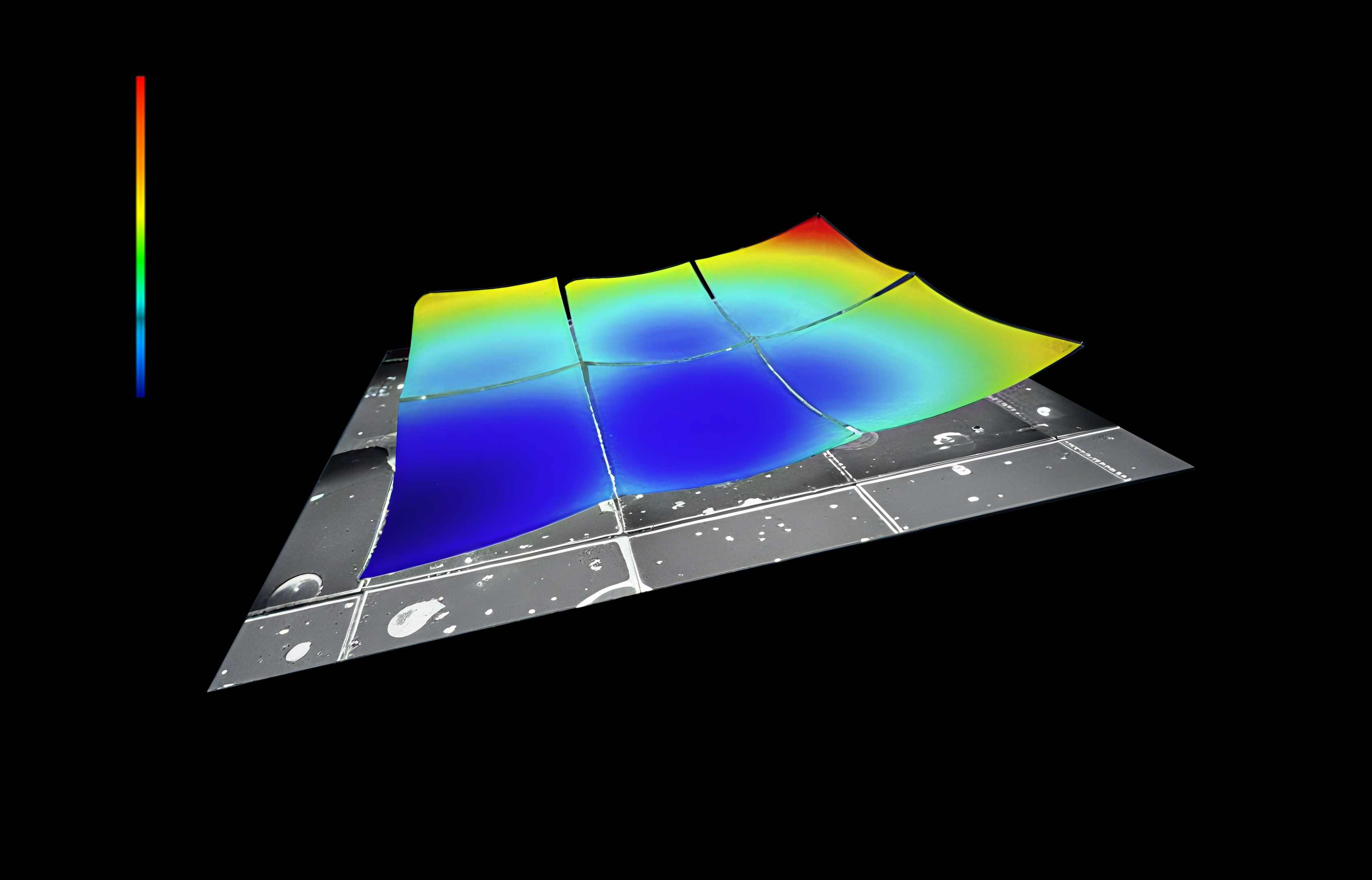
分层膜厚无损检测:采用非接触、非破坏测量方式,对多层薄膜进行 3D 形貌重构,精准分析各层膜厚分布,为薄膜材料研究提供无损检测新方案。
新启航半导体,专业提供综合光学3D测量解决方案!