Day39 图像数据与显存
目录
一、图像数据的格式:灰度和彩色数据
1.1 灰度图像
1.2 彩色图像
二、模型的定义
2.1 黑白图像模型的定义
2.2 彩色图像模型的定义
2.3 模型定义与batchsize的关系
三、显存占用的4种地方
a.模型参数+梯度参数
b.优化器参数
SGD
Adam
c.数据批量所占显存
d.神经元输出中间状态
四、batchisize和训练的关系
五、超参数优化与优化器详解
1、超参数优化(Hyperparameter Optimization)
2、优化器(Optimizer)原理与应用
3、从手写数字识别优化到 CNN(卷积神经网络)
4、显存容量与批量大小计算
5、随机种子(Random Seed)的作用与设置
总结
一、图像数据的格式:灰度和彩色数据
1.1 灰度图像
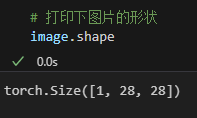
minist这个经典的手写数据集,作为图像数据,相较于结构化数据(表格数据)他的特点在于他每个样本的的形状并不是(特征数,),而是(宽,高,通道数)
# 先继续之前的代码
import torch
import torch.nn as nn
import torch.optim as optim
from torch.utils.data import DataLoader , Dataset # DataLoader 是 PyTorch 中用于加载数据的工具
from torchvision import datasets, transforms # torchvision 是一个用于计算机视觉的库,datasets 和 transforms 是其中的模块
import matplotlib.pyplot as plt
# 设置随机种子,确保结果可复现
torch.manual_seed(42)# 1. 数据预处理,该写法非常类似于管道pipeline
# transforms 模块提供了一系列常用的图像预处理操作# 先归一化,再标准化
transform = transforms.Compose([transforms.ToTensor(), # 转换为张量并归一化到[0,1]transforms.Normalize((0.1307,), (0.3081,)) # MNIST数据集的均值和标准差,这个值很出名,所以直接使用
])
import matplotlib.pyplot as plt# 2. 加载MNIST数据集,如果没有会自动下载
train_dataset = datasets.MNIST(root='./data',train=True,download=True,transform=transform
)test_dataset = datasets.MNIST(root='./data',train=False,transform=transform
)
# 随机选择一张图片,可以重复运行,每次都会随机选择
sample_idx = torch.randint(0, len(train_dataset), size=(1,)).item() # 随机选择一张图片的索引
# len(train_dataset) 表示训练集的图片数量;size=(1,)表示返回一个索引;torch.randint() 函数用于生成一个指定范围内的随机数,item() 方法将张量转换为 Python 数字
image, label = train_dataset[sample_idx] # 获取图片和标签
# 可视化原始图像(需要反归一化)
def imshow(img):img = img * 0.3081 + 0.1307 # 反标准化npimg = img.numpy()plt.imshow(npimg[0], cmap='gray') # 显示灰度图像plt.show()print(f"Label: {label}")
imshow(image) 
上述代码,介绍了图像数据的预处理,图像数据,他和结构化数据有什么差异点呢?
结构化数据(如表格)的形状通常是 (样本数, 特征数),例如 (1000, 5) 表示 1000 个样本,每个样本有 5 个特征。图像数据的形状更复杂,需要保留空间信息(高度、宽度、通道),因此不能直接用一维向量表示。其中颜色信息往往是最开始输入数据的通道的含义,因为每个颜色可以用红绿蓝三原色表示,因此一般输入数据的通道数是 3。
| 维度索引 | 含义 | 数值说明 |
|---|---|---|
0 | 通道数(Channels) | 1 表示这是一张灰度图(仅有一个颜色通道,如黑白照片)。如果是彩色图(如RGB),通道数为 3。 |
1 | 高度(Height) | 28 表示图像的垂直像素数为28像素。 |
2 | 宽度(Width) | 28 表示图像的水平像素数为28像素。 |
MNIST 数据集是手写数字的 灰度图像,每个像素点的取值范围为 0-255(黑白程度),因此 通道数为 1。图像尺寸统一为 28×28 像素。
1.2 彩色图像
在 PyTorch 中,图像数据的形状通常遵循 (通道数, 高度, 宽度) 的格式(即 Channel First 格式),这与常见的 (高度, 宽度, 通道数)(Channel Last,如 NumPy 数组)不同。---注意顺序关系,
注意点:
- 如果用matplotlib库来画图,需要转换下顺序
- 模型输入通常需要 批次维度(Batch Size),形状变为 (批次大小, 通道数, 高度, 宽度)。例如,批量输入 10 张 MNIST 图像时,形状为 (10, 1, 28, 28)。
# 打印一张彩色图像,用cifar-10数据集
import torch
import torchvision
import torchvision.transforms as transforms
import matplotlib.pyplot as plt
import numpy as np# 设置随机种子确保结果可复现
torch.manual_seed(42)
# 定义数据预处理步骤
transform = transforms.Compose([transforms.ToTensor(), # 转换为张量并归一化到[0,1]transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5)) # 标准化处理
])# 加载CIFAR-10训练集
trainset = torchvision.datasets.CIFAR10(root='./data',train=True,download=True,transform=transform
)# 创建数据加载器
trainloader = torch.utils.data.DataLoader(trainset,batch_size=4,shuffle=True
)# CIFAR-10的10个类别
classes = ('plane', 'car', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck')# 随机选择一张图片
sample_idx = torch.randint(0, len(trainset), size=(1,)).item()
image, label = trainset[sample_idx]# 打印图片形状
print(f"图像形状: {image.shape}") # 输出: torch.Size([3, 32, 32])
print(f"图像类别: {classes[label]}")# 定义图像显示函数(适用于CIFAR-10彩色图像)
def imshow(img):img = img / 2 + 0.5 # 反标准化处理,将图像范围从[-1,1]转回[0,1]npimg = img.numpy()plt.imshow(np.transpose(npimg, (1, 2, 0))) # 调整维度顺序:(通道,高,宽) → (高,宽,通道)plt.axis('off') # 关闭坐标轴显示plt.show()# 显示图像
imshow(image)
注意,因为这里设计到图像的显示,所以就需要调整维度顺序:(通道,高,宽) → (高,宽,通道)

二、模型的定义
图像相关的神经网络的定义(不涉及训练和测试过程)
2.1 黑白图像模型的定义
# 先归一化,再标准化
transform = transforms.Compose([transforms.ToTensor(), # 转换为张量并归一化到[0,1]transforms.Normalize((0.1307,), (0.3081,)) # MNIST数据集的均值和标准差,这个值很出名,所以直接使用
])
import matplotlib.pyplot as plt# 2. 加载MNIST数据集,如果没有会自动下载
train_dataset = datasets.MNIST(root='./data',train=True,download=True,transform=transform
)test_dataset = datasets.MNIST(root='./data',train=False,transform=transform
)
# 定义两层MLP神经网络
class MLP(nn.Module):def __init__(self):super(MLP, self).__init__()self.flatten = nn.Flatten() # 将28x28的图像展平为784维向量self.layer1 = nn.Linear(784, 128) # 第一层:784个输入,128个神经元self.relu = nn.ReLU() # 激活函数self.layer2 = nn.Linear(128, 10) # 第二层:128个输入,10个输出(对应10个数字类别)def forward(self, x):x = self.flatten(x) # 展平图像x = self.layer1(x) # 第一层线性变换x = self.relu(x) # 应用ReLU激活函数x = self.layer2(x) # 第二层线性变换,输出logitsreturn x# 初始化模型
model = MLP()device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
model = model.to(device) # 将模型移至GPU(如果可用)from torchsummary import summary # 导入torchsummary库
print("\n模型结构信息:")
summary(model, input_size=(1, 28, 28)) # 输入尺寸为MNIST图像尺寸 
关注和之前结构化MLP的差异
1、输入需要展平操作
MLP 的输入层要求输入是一维向量,但 MNIST 图像是二维结构(28×28 像素),形状为 [1, 28, 28](通道 × 高 × 宽)。nn.Flatten()展平操作 将二维图像 “拉成” 一维向量(784=28×28 个元素),使其符合全连接层的输入格式。
其中不定义这个flatten方法,直接在前向传播的过程中用 x = x.view(-1, 28 * 28) 将图像展平为一维向量也可以实现
2、输入数据的尺寸包含了通道数input_size=(1, 28, 28)
3、参数的计算
- 第一层 layer1(全连接层)
权重参数:输入维度 × 输出维度 = 784 × 128 = 100,352
偏置参数:输出维度 = 128
合计:100,352 + 128 = 100,480
- 第二层 layer2(全连接层)
权重参数:输入维度 × 输出维度 = 128 × 10 = 1,280
偏置参数:输出维度 = 10 合计:1,280 + 10 = 1,290
- 总参数:100,480(layer1) + 1,290(layer2) = 101,770
2.2 彩色图像模型的定义
class MLP(nn.Module):def __init__(self, input_size=3072, hidden_size=128, num_classes=10):super(MLP, self).__init__()# 展平层:将3×32×32的彩色图像转为一维向量# 输入尺寸计算:3通道 × 32高 × 32宽 = 3072self.flatten = nn.Flatten()# 全连接层self.fc1 = nn.Linear(input_size, hidden_size) # 第一层self.relu = nn.ReLU()self.fc2 = nn.Linear(hidden_size, num_classes) # 输出层def forward(self, x):x = self.flatten(x) # 展平:[batch, 3, 32, 32] → [batch, 3072]x = self.fc1(x) # 线性变换:[batch, 3072] → [batch, 128]x = self.relu(x) # 激活函数x = self.fc2(x) # 输出层:[batch, 128] → [batch, 10]return x# 初始化模型
model = MLP()device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
model = model.to(device) # 将模型移至GPU(如果可用)from torchsummary import summary # 导入torchsummary库
print("\n模型结构信息:")
summary(model, input_size=(3, 32, 32)) # CIFAR-10 彩色图像(3×32×32) 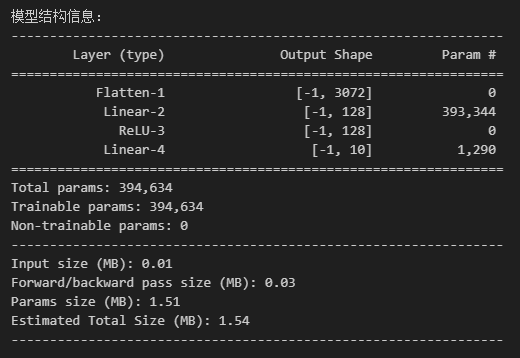
- 第一层 layer1(全连接层)
权重参数:输入维度 × 输出维度 = 3072 × 128 = 393,216
偏置参数:输出维度 = 128
合计:393,216 + 128 = 393,344
- 第二层 layer2(全连接层)
权重参数:输入维度 × 输出维度 = 128 × 10 = 1,280
偏置参数:输出维度 = 10
合计:1,280 + 10 = 1,290
- 总参数:393,344(layer1) + 1,290(layer2) = 394,634
2.3 模型定义与batchsize的关系
实际定义中,输入图像还存在batchsize这一维度
在 PyTorch 中,模型定义和输入尺寸的指定不依赖于 batch_size,无论设置多大的 batch_size,模型结构和输入尺寸的写法都是不变的。
class MLP(nn.Module):def __init__(self):super().__init__()self.flatten = nn.Flatten() # nn.Flatten()会将每个样本的图像展平为 784 维向量,但保留 batch 维度。self.layer1 = nn.Linear(784, 128)self.relu = nn.ReLU()self.layer2 = nn.Linear(128, 10)def forward(self, x):x = self.flatten(x) # 输入:[batch_size, 1, 28, 28] → [batch_size, 784]x = self.layer1(x) # [batch_size, 784] → [batch_size, 128]x = self.relu(x)x = self.layer2(x) # [batch_size, 128] → [batch_size, 10]return xPyTorch 模型会自动处理 batch 维度(即第一维),无论 batch_size 是多少,模型的计算逻辑都不变。batch_size 是在数据加载阶段定义的,与模型结构无关。
summary(model, input_size=(1, 28, 28))中的input_size不包含 batch 维度,只需指定样本的形状(通道 × 高 × 宽)。
总结:batch_size与模型定义的关系**
| 组件 | 是否涉及batch_size | 示例代码 |
|---|---|---|
| 模型定义 | ❌ 完全无关 | class MLP(nn.Module) 中无需提及batch_size |
| torchsummary | ❌ 只需要样本形状(不含batch维度) | summary(model, input_size=(1, 28, 28)) |
| DataLoader | ✅ 在此设置batch_size | DataLoader(dataset, batch_size=64) |
| 训练循环 | ✅ 数据自动以batch形式输入模型 | for data, target in train_loader: ... |
三、显存占用的4种地方
显存占用的主要组成部分
在面对数据集过大的情况下,由于无法一次性将数据全部加入到显存中,所以采取了分批次加载这种方式。即一次只加载一部分数据,保证在显存的范围内。
那么显存设置多少合适呢?如果设置的太小,那么每个batchsize的训练不足以发挥显卡的能力,浪费计算资源;如果设置的太大,会出现OOT(out of memory)
显存一般被以下内容占用:
-
模型参数与梯度:模型的权重(Parameters)和对应的梯度(Gradients)会占用显存,尤其是深度神经网络(如 Transformer、ResNet 等),一个 1 亿参数的模型(如 BERT-base),单精度(float32)参数占用约 400MB(1e8×4Byte),加上梯度则翻倍至 800MB(每个权重参数都有其对应的梯度)。
-
部分优化器(如 Adam)会为每个参数存储动量(Momentum)和平方梯度(Square Gradient),进一步增加显存占用(通常为参数大小的 2-3 倍)
-
其他开销。
oom处理方案
下面以手写数据集为例
from torch.utils.data import DataLoader# 定义训练集的数据加载器,并指定batch_size
train_loader = DataLoader(dataset=train_dataset, # 加载的数据集batch_size=64, # 每次加载64张图像shuffle=True # 训练时打乱数据顺序
)# 定义测试集的数据加载器(通常batch_size更大,减少测试时间)
test_loader = DataLoader(dataset=test_dataset,batch_size=1000,shuffle=False
)手写数据集(MNIST)和当前 MLP 模型,显存占用的计算可以简化为以下几个部分。
a.模型参数+梯度参数
模型参数与梯度(FP32 精度):
参数总量:101,770 个参数
- 1字节(Byte)= 8位(bit),是计算机存储的最小寻址单位。
- 位(bit)是二进制数的最小单位(0或1),例如
0b1010表示4位二进制数。 - 1KB=1024字节;1MB=1024KB=1,048,576字节
常见数据类型的字节占用
| 数据类型 | 位数(bit) | 字节(Byte) | 数值范围(近似) |
|---|---|---|---|
float32(单精度浮点数) | 32 | 4 | ±1.7×10^38 |
float64(双精度浮点数) | 64 | 8 | ±1.8×10^308 |
uint8(无符号8位整数) | 8 | 1 | 0~255 |
- MNIST数据集的原始图像像素值为0-255的整数(uint8类型,占1字节),表示灰度值(0=黑,255=白)。
- 但PyTorch的
transforms.ToTensor()会将其归一化到[0, 1]范围,并转换为float32类型(浮点型更适合神经网络计算)。
计算示例:单张MNIST图像的显存占用
-
原始像素值(uint8,未转换时)
- 尺寸:28×28像素
- 单像素占用:1字节(uint8)
- 总占用:
28×28×1 = 784字节 ≈ 0.766 KB
-
转换为
float32张量后- 尺寸:
1×28×28(通道×高×宽) - 单像素占用:4字节(float32)
- 总占用:
1×28×28×4 = 3136字节 ≈ 3.06 KB
- 尺寸:
单精度(float32)参数占用:101,770 × 4 Byte ≈ 403 KB
梯度是损失函数对模型参数的导数(∂Loss/∂Weight),用于指示参数更新的方向和幅度。梯度是损失函数对模型参数的导数(∂Loss/∂Weight),用于指示参数更新的方向和幅度。因此在默认情况下,梯度的数据类型和数目与参数相同。
梯度占用(反向传播时):与参数相同,合计约 806 KB
b.优化器参数
优化器状态:
SGD
- SGD优化器不存储额外动量,因此无额外显存占用。
- SGD 随机梯度下降,最基础的优化器,直接沿梯度反方向更新参数。
- 参数更新公式:w = w - learning_rate * gradient
Adam
- Adam优化器:自适应学习率优化器,结合了动量(Momentum)和梯度平方的指数移动平均。
- 每个参数存储动量(m)和平方梯度(v),占用约
101,770 × 8 Byte ≈ 806 KB - 动量(m):每个参数对应一个动量值,数据类型与参数相同(float32),占用 403 KB。
- 梯度平方(v):每个参数对应一个梯度平方值,数据类型与参数相同(float32),占用 403 KB。
c.数据批量所占显存
数据批量(batch_size)的显存占用
- 单张图像尺寸:
1×28×28(通道×高×宽),归一化转换为张量后为float32类型- 单张图像显存占用:
1×28×28×4 Byte = 3,136 Byte ≈ 3 KB
- 单张图像显存占用:
- 批量数据占用:
batch_size × 单张图像占用- 例如:
batch_size=64时,数据占用为64×3 KB ≈ 192 KB batch_size=1024时,数据占用为1024×3 KB ≈ 3 MB
- 例如:
d.神经元输出中间状态
前向/反向传播中间变量:
- 对于两层MLP,中间变量(如
layer1的输出)占用较小:batch_size×128维向量:batch_size×128×4 Byte = batch_size×512 Byte- 例如
batch_size=1024时,中间变量约512 KB
以SGD为例,此时其他参数占用固定,batchsize会影响显存占用
| batch_size | 数据占用 | 中间变量 | 总显存占用(近似) |
|---|---|---|---|
| 64 | 192 KB | 32 KB | ~1 MB |
| 256 | 768 KB | 128 KB | ~1.7 MB |
| 1024 | 3 MB | 512 KB | ~4.5 MB |
| 4096 | 12 MB | 2 MB | ~15 MB |
在 PyTorch 中,在使用DataLoader加载数据时,如果不指定batch_size参数,默认值是1
,即每次迭代返回一个样本。这与一次性使用全部数据进行训练是完全不同的概念。如果想要一次性使用全部数据进行训练,需要手动将batch_size设置为数据集的大小,但对于大型数据集,这样做通常会导致内存不足,因为一次性将所有数据加载到内存中可能会超出硬件的内存限制。
大规模数据时,通常从16开始测试,然后逐渐增加,确保代码运行正常且不报错,直到出现 内存不足(OOM)报错 或训练效果下降,此时选择略小于该值的 batch_size。
训练时候搭配 nvidia-smi 监控显存占用,合适的 batch_size = 硬件显存允许的最大值 × 0.8(预留安全空间),并通过训练效果验证调整。
四、batchisize和训练的关系
batchsize对于训练的影响
在深度学习中,使用较大的 batch_size(批量大小)相比单样本训练(batch_size=1)有以下核心优势
- 并行计算能力最大化,减小训练时间;且大幅减少更新次数
- 梯度方向更准确,单样本训练的梯度仅基于单个数据点,可能包含大量噪声(尤其是数据分布不均或存在异常值时)。大 batch_size 的梯度是多个样本的平均值,能抵消单个样本的随机性,梯度方向更接近真实分布的 “全局最优方向”。会让训练过程更稳定,波动更小

五、超参数优化与优化器详解
1、超参数优化(Hyperparameter Optimization)
(1) 超参数的定义与作用
超参数是机器学习模型中手动设定、而非通过训练学习得到的参数,直接影响模型性能。例如:
- 学习率(Learning Rate):控制模型参数更新的步长,过大易震荡,过小收敛慢。
- 批量大小(Batch Size):每次迭代输入的样本数,影响训练稳定性和显存占用。
- 神经网络层数、神经元数量:决定模型复杂度,过深易过拟合,过浅表现力不足。
- 正则化系数(如 L1/L2):抑制过拟合的强度。
(2) 常见优化方法
| 方法 | 原理 | 优缺点 |
|---|---|---|
| 网格搜索(Grid Search) | 穷举所有预设超参数组合,选择验证集表现最佳的组合。 | 准确率高,但计算成本极高,适用于小范围参数搜索。 |
| 随机搜索(Random Search) | 按概率分布随机采样超参数组合,重复多次实验。 | 效率高于网格搜索,尤其适合非关键参数(如学习率)的优化。 |
| 贝叶斯优化(Bayesian Optimization) | 通过高斯过程建模超参数与性能的关系,动态选择下一个最优搜索点。 | 利用历史数据减少搜索次数,适合计算昂贵的模型(如深度学习)。 |
| 动态规划方法(如 Hyperband) | 基于资源分配策略,对表现差的超参数组合提前终止训练,聚焦潜力组合。 | 节省计算资源,适合大规模超参数搜索。 |
| 神经架构搜索(NAS) | 用神经网络自动设计网络结构(如层数、连接方式),通过强化学习或进化算法优化。 | 自动化程度高,但计算成本极高,需专用硬件支持。 |
(3)手写数字识别中的超参数优化案例
以 MNIST 手写数字识别为例,关键超参数包括:
- 学习率(如 0.01、0.001):影响模型收敛速度;
- 批量大小(如 32、64、128):小批量更易跳出局部最优,但训练时间长;
- 全连接层神经元数量(如 128、256):控制模型对数字特征的抽象能力。
2、优化器(Optimizer)原理与应用
(1)优化器的核心作用
优化器负责根据损失函数的梯度更新模型参数,目标是找到使损失最小的参数组合。
(2)主流优化器对比
| 优化器 | 核心原理 | 优点 | 缺点 | 适用场景 |
|---|---|---|---|---|
| SGD(随机梯度下降) | 每次用一个样本(或小批量)计算梯度并更新参数。 | 实现简单,收敛方向稳定。 | 学习率需手动调整,易陷入局部最优。 | 简单模型或数据量小的场景。 |
| SGD with Momentum | 引入动量项,累积历史梯度方向,加速收敛并减少震荡。 | 加速收敛,抑制参数更新抖动。 | 仍需手动调整学习率。 | 图像分类等需要快速收敛的任务。 |
| Adagrad | 对不同参数自适应调整学习率,稀疏特征场景表现好。 | 无需手动调参,适合稀疏数据。 | 后期学习率衰减过快。 | 自然语言处理(NLP)等稀疏输入。 |
| RMSprop | 改进 Adagrad,用滑动平均控制历史梯度的影响,避免学习率过早衰减。 | 自适应学习率,收敛稳定。 | 超参数较少,通用性强。 | 深度学习通用场景。 |
| Adam(Adaptive Moment Estimation) | 结合动量和自适应学习率,同时跟踪梯度的一阶矩(均值)和二阶矩(方差)。 | 收敛速度快,超参数鲁棒性强。 | 可能在后期收敛精度不足。 | 默认首选,尤其适合复杂网络。 |
(3)手写数字识别中优化器的选择
在 MNIST 任务中,Adam 优化器通常表现更优:
- 无需精细调整学习率,默认参数(如 1e-3)即可快速收敛;
- 相比 SGD,可在更少迭代次数内达到 99% 以上的准确率;
- 对网络结构(如全连接层或 CNN)的适应性更强。
3、从手写数字识别优化到 CNN(卷积神经网络)
(1)传统全连接网络的瓶颈
手写数字(如 MNIST)尺寸为 28×28 像素,若用全连接网络:
- 输入层神经元数 = 28×28 = 784,假设隐藏层有 1000 个神经元,则第一层权重参数为 784×1000 = 784,000 个;
- 问题:参数过多易过拟合,且无法捕捉像素间的空间相关性(如数字的笔画结构)。
(2)CNN 的核心优势与结构
CNN 通过以下设计优化手写数字识别:
- 卷积层(Convolution Layer):
- 局部感知野(Local Receptive Field):每个神经元仅连接输入图像的局部区域(如 3×3 窗口),提取边缘、拐角等基础特征;
- 权值共享(Weight Sharing):同一卷积核的参数在全图共享,大幅减少参数数量。例如,用 10 个 5×5 卷积核处理 MNIST 图像,参数仅为 5×5×1×10 = 250 个,远少于全连接层。
- 池化层(Pooling Layer):通过下采样(如 2×2 最大池化)降低特征维度,增强平移不变性(如数字平移后仍可正确识别)。
- 特征分层提取:浅层卷积提取边缘、线条,深层卷积组合成数字的整体形状(如 “0” 的环形、“1” 的竖线)。
(3)CNN 在 MNIST 上的性能对比
| 模型类型 | 准确率 | 参数量 | 训练时间(GPU) |
|---|---|---|---|
| 全连接网络 | ~97% | ~100 万 | 10 分钟 |
| 简单 CNN(2 层卷积) | ~99.5% | ~10 万 | 2 分钟 |
4、显存容量与批量大小计算
(1)显存占用计算公式
显存一次性可读取的图片数量(批量大小 Batch Size)由以下因素决定:
显存占用(字节)= Batch Size × 图片高度 × 图片宽度 × 通道数 × 数据类型字节数
- 数据类型字节数:如 float32 占 4 字节,float16 占 2 字节;
- 通道数:RGB 图像为 3,灰度图为 1(如 MNIST)。
(2)实例计算:MNIST 数据集
MNIST 图片尺寸为 28×28×1,数据类型为 float32:
- 单张图片显存占用 = 28×28×1×4 = 3136 字节 ≈ 3KB;
- 若显存容量为 8GB(8×1024×1024×1024 ≈ 8.59×10^9 字节),则理论最大 Batch Size 为:
plaintext
但实际中需预留空间给模型参数、梯度等,通常 Batch Size 设为 128-1024。Batch Size = 8.59×10^9 ÷ 3136 ≈ 2739000(张)
(3)优化策略
- 降低图片分辨率(如将 28×28 压缩为 14×14),显存占用可减少为原来的 1/4;
- 使用混合精度训练(如 float16),显存占用减半;
- 动态调整 Batch Size:根据显存剩余空间自动降低批量大小,避免 OOM(Out of Memory)错误。
5、随机种子(Random Seed)的作用与设置
(1)为什么需要设置随机种子?
深度学习中多个环节存在随机性:
- 模型权重初始化(如 Xavier、He 初始化);
- 数据洗牌(Shuffle)顺序;
- 优化器中的随机因素(如 Adam 的噪声项)。
设置随机种子可确保实验可复现性,即相同种子下多次运行代码得到相同结果。
(2)代码实现(以 PyTorch 为例)
import torch
import numpy as np
import random# 设置全局随机种子
def set_seed(seed):random.seed(seed)np.random.seed(seed)torch.manual_seed(seed)torch.cuda.manual_seed_all(seed) # 多GPU场景# 可选:确保卷积操作的确定性(可能影响性能)torch.backends.cudnn.deterministic = Truetorch.backends.cudnn.benchmark = False# 使用示例
set_seed(42) # 常用种子值,如42、0等
(3) 注意事项
- 若使用数据加载器(DataLoader),需设置
shuffle=True时配合generator=torch.Generator().manual_seed(seed); - 不同框架(TensorFlow、PyTorch)的种子设置接口不同,需分别处理;
- 仅设置种子无法完全复现结果,还需确保硬件环境(如 GPU 型号、是否启用 CUDA 加速)一致。
总结
从超参数优化到 CNN 架构,再到显存计算与随机种子设置,这些技术点共同支撑了深度学习模型的训练与优化。在手写数字识别任务中,CNN 通过稀疏连接和特征分层提取,相比全连接网络显著提升了性能,而合理设置超参数、优化器和批量大小则是模型高效训练的关键。随机种子的使用则确保了实验结果的可复现性,是科研与工程实践中的基础操作。
@浙大疏锦行