自动驾驶---SD图导航的规划策略
1 背景
在之前的博客《自动驾驶---方案从有图迈进无图》中笔者介绍了自动驾驶方案从有图到无图的发展历程。其中,自动驾驶从HD图(Highlight Definition Map)到SD图(Standard Definition Map,标准定义地图)的过渡,涉及到自动驾驶系统中地图数据的使用和依赖程度的变化。甚至未来要探索的真正的无图,类似人在野外迷路,并且只有指南针的场景。这种时候自动驾驶车辆应该怎么开?
虽然说是无图,但据笔者了解,国内车企直接扔掉原有的高精地图转向无图的应该不多,有高精地图的区域大部分还是保留了。真正的无图应该是只有SD地图,HD地图被完全舍弃。
2 无图方案
本篇博客的主要内容给读者朋友展示非结构化场景的工作,并且是只有SD图的场景。目前国内并没有重视野外场景的数据,模型训练的话,野外场景数据的收集以及标注都需要大量精力。至于特斯拉FSD是否收集了大量乡村山路的数据不得而知,如果只是模型的通用性能(没有采集特定场景的数据训练),那更让笔者佩服了。
2.1 无图的背景来源
在自动驾驶的早期阶段,高精度地图通常包含车道级的细节,如车道线、交通标志、信号灯位置等,这些信息对于车辆的精确定位和路径规划非常重要 。尽管高精度地图在自动驾驶中取得了成功,但它们也存在局限性。创建和维护大面积区域的高精度地图可能成本高昂,且更新困难,这限制了自动驾驶技术的广泛应用 。
随着技术的发展,业界开始探索使用SD Map的可能性。SD图通常包含更少的细节,但足以提供基本的导航信息。这种方法可以减少对高精度地图的依赖,降低成本,并提高系统的灵活性 。MapLite 2.0是一种在线构建高精度地图的方法,它从标准定义地图开始,并结合车载传感器来推断本地高精度地图。这种方法可以在没有详细先验地图的情况下,使用车载传感器和SD地图先验来推断出高度结构化的类似于高清地图的世界模型 。
本篇博客主要探讨由MIT计算机科学与人工智能实验室(CSAIL)的研究团队探讨的在没有详细先验地图的情况下,如何实现自动驾驶车辆在农村交通环境中的导航。
2.2 框架
在这篇论文中,通过一个新颖的无地图驾驶框架解决了农村环境中的自主导航问题,该框架结合了全局导航的稀疏拓扑图和基于传感器的局部导航感知系统。
首先,选择车辆传感器视图中的局部导航目标作为通向全局目标的航路点。接下来,局部感知系统在车坐标系中生成一个可行的轨迹,以在遵守被穿越路段的道路规则的同时到达航路点。使用车辆的里程计和基于最小二乘残差的相关不确定性,以及递归的过滤方法,从而保持在局部坐标系中更新这些轨迹,使车辆能够在没有详细的先验地图的情况下,可靠、高速地在道路网络中导航。我们在全尺寸自动驾驶汽车上演示了系统的性能,并在大量收集的数据基础上对系统进行了基准测试。
整体上有点像感知提取出的freespace,供规划模块使用。目前常见的感知模型,比如BEV和OCC是否适用乡村或者更极端的道路,从国内车企的表现来看,性能是不如特斯拉,可能需要更大的数据量来训练,并且国内车企角逐主要在城区,高速场景。
2.2 具体内容
这项研究由麻省理工学院(MIT)的计算机科学与人工智能实验室(CSAIL)进行,他们开发了一个系统(MapLite),该系统能够在没有3D地图的情况下实现自动驾驶。
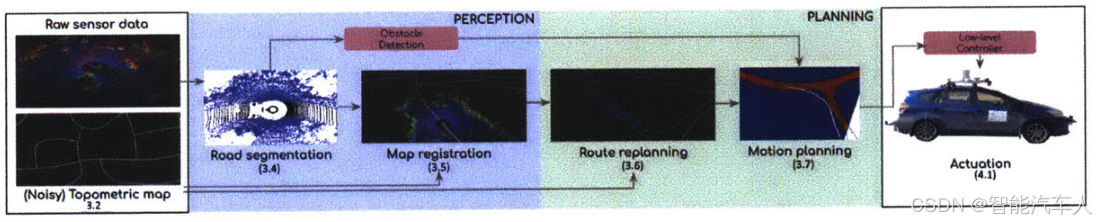
研究团队开发的新的框架MapLite,它结合了稀疏拓扑地图和基于传感器的局部导航感知系统,实现了在没有3D地图的情况下的自动驾驶。MapLite利用了OpenStreetMap等公开可用的稀疏地形图,并使用车载传感器来分割道路区域并注册地形图,从而将高级导航目标与车辆框架中的变分路径规划器融合。这使得系统能够在不依赖外部定位系统(如GPS或详细先验地图)的情况下,规划出正确导航道路交叉口的轨迹。
MapLite 系统的关键特点包括:
- 拓扑地图使用:MapLite 利用稀疏的公开可用的拓扑地图(例如 OpenStreetMap),这些地图通常包含道路的高层信息,但不包含精确的车道级细节。这使得系统能够在没有详细先验地图的情况下进行导航。
- 车载传感器融合:系统使用车载传感器,如激光雷达(LiDAR)和 GPS,来分割道路区域并注册拓扑地图。这些传感器帮助车辆理解其周围环境,并与拓扑地图进行匹配,以实现精确的定位和导航。
- 自主导航:MapLite 能够在没有外部定位系统(例如 GPS)的帮助下,规划出正确导航道路交叉口的轨迹。这对于在农村环境中的自动驾驶尤为重要,因为这些区域可能没有详细的地图数据可用。
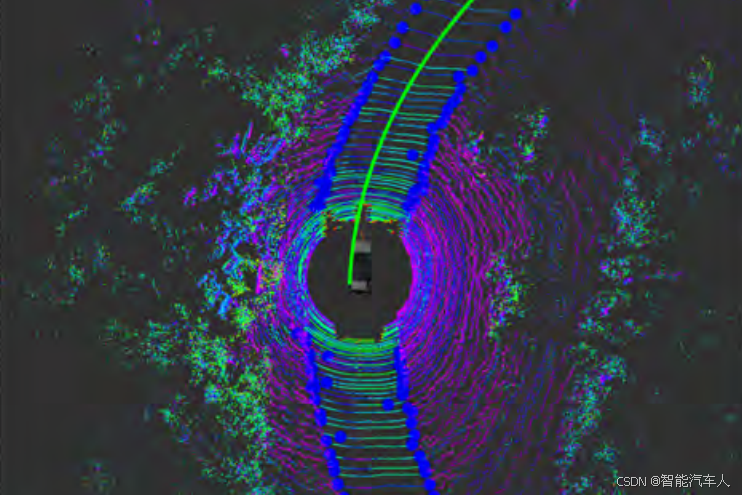
- 实时道路分割和地图注册:通过车载传感器生成的点云数据,MapLite 能够实时分割道路并进行地图注册,以提供车辆在道路上的精确位置。
- 变分路径规划器:系统将高级导航目标与车载框架中的变分路径规划器融合,以生成局部目标路径。
2.3 测试结果
(1)测试和验证
MapLite 系统在全尺寸自动驾驶汽车上进行了实施,并在超过 15 公里的道路上进行了详尽的测试,包括 100 多次自动交叉路口穿越。通过模拟测试进一步扩展了这些结果,以在复杂的路口拓扑结构上验证系统的性能。
(2)实验结果
研究团队在全尺寸自动驾驶汽车上实施了MapLite,并在超过15公里的道路上进行了详尽的测试,包括100多次自动交叉路口穿越。通过模拟测试进一步扩展了这些结果,以在复杂的路口拓扑结构(如交通圈)上验证系统的性能。
3 总结
这项研究展示了在没有详细先验地图的情况下,如何利用现有的公开地图资源和车载传感器实现自动驾驶。这对于自动驾驶技术的发展和应用具有重要意义,尤其是在地图数据不完整或难以获取的农村和偏远地区。通过利用现有的公开地图资源和车载传感器,MapLite为自动驾驶车辆提供了一种在复杂环境中导航的有效解决方案。
参考论文:
《Autonomous Vehicle Navigation in Rural Environments without Detailed Prior Maps》