PCDF (Progressive Continuous Discrimination Filter)模块构建
一 核心原理
PCDF 模块通过渐进式特征融合机制解决以下问题:
(1)特征不连续:浅层特征(边缘细节)与深层特征(语义信息)的融合。
(2)尺度变化:目标尺寸在视频序列中的剧烈变化。
(3)噪声干扰:低质量医疗图像中的伪影干扰

二 核心组件
(1)Continuous Spatial Filter(CSF)
功能:融合多尺度上下文信息
class CSF(nn.Module):def __init__(self, in_ch):super().__init__()self.conv1 = nn.Conv2d(in_ch, in_ch//2, 3, padding=1)self.conv2 = nn.Conv2d(in_ch, in_ch//2, 3, dilation=2, padding=2)def forward(self, x):x_low = self.conv1(x) # 局部细节x_high = self.conv2(x) # 全局上下文return torch.cat([x_low, x_high], dim=1)
(2)Content-adaptive Calibration(CCM)
"让模型自己决定特征的重要性"
功能:动态调整特征响应权重

公式:
import torch
import torch.nn as nnclass CCM(nn.Module):def __init__(self, in_channels, reduction_ratio=4):super(CCM, self).__init__()# 通道压缩参数 (默认为4:1)reduced_channels = max(1, in_channels // reduction_ratio) # MLP实现self.mlp = nn.Sequential(# 信息压缩nn.Linear(in_channels, reduced_channels, bias=True),nn.ReLU(inplace=True),# 权重恢复nn.Linear(reduced_channels, in_channels, bias=True),nn.Sigmoid())self.gap = nn.AdaptiveAvgPool2d(1) # 全局平均池化def forward(self, x):# 1. 全局特征压缩batch_size, num_channels, _, _ = x.size()gap_out = self.gap(x).view(batch_size, num_channels)# 2. 生成通道权重channel_weights = self.mlp(gap_out)channel_weights = channel_weights.view(batch_size, num_channels, 1, 1)# 3. 特征校准return x * channel_weights.expand_as(x)
(3)Progressive Fusion Unit(核心)

import torch
import torch.nn as nnclass ProgressiveFusionUnit(nn.Module):def __init__(self, in_channels, reduction=4):super().__init__()# 校准模块self.calibration = nn.Sequential(nn.Conv2d(2*in_channels, in_channels, 3, padding=1),nn.BatchNorm2d(in_channels),nn.ReLU())self.ccm = CCM(in_channels) # 内容自适应校准模块# 门控精炼self.gate = nn.Sequential(nn.Conv2d(in_channels, 1, 3, padding=1),nn.Sigmoid())# 选择性激活self.csa = nn.Sequential(nn.Conv2d(in_channels, in_channels//reduction, 1),nn.ReLU(),nn.Conv2d(in_channels//reduction, 1, 1),nn.Sigmoid())def forward(self, current, adjacent):# 深度校准fused = torch.cat([current, adjacent], dim=1)calibrated = self.calibration(fused) + self.ccm(adjacent)# 门控空间优化gate_mask = self.gate(calibrated)refined = calibrated * gate_mask + avg_pool(calibrated) * (1-gate_mask)# 内容激活act_mask = self.csa(refined)return refined * act_mask.expand_as(refined)
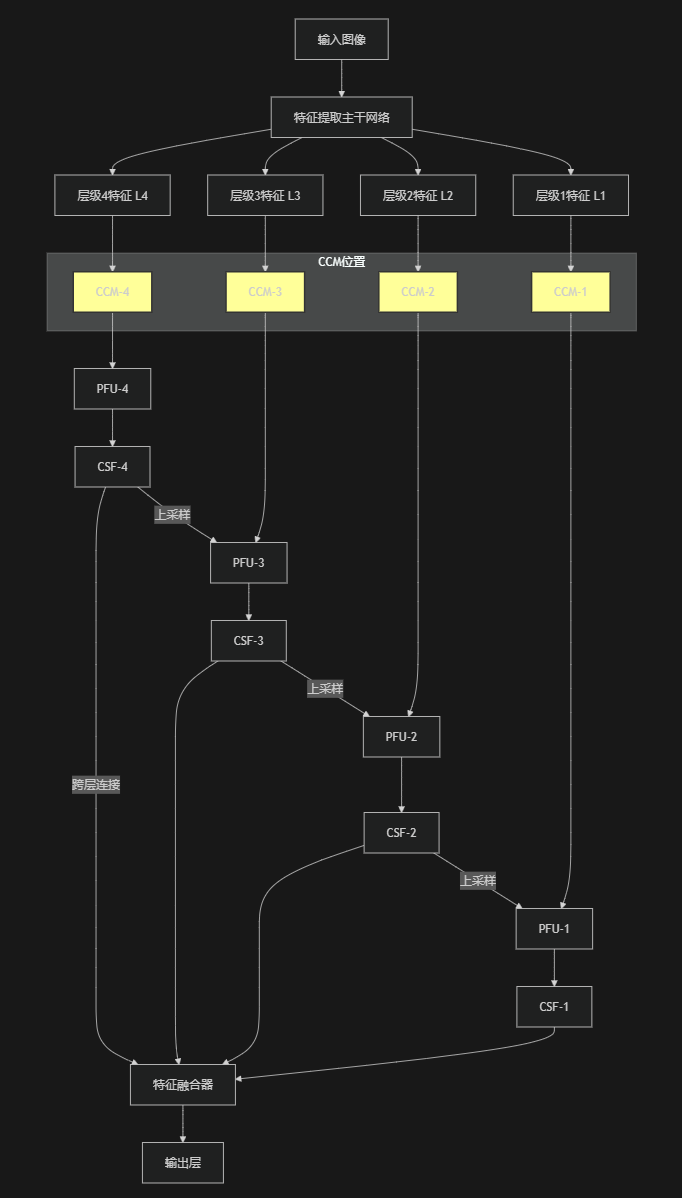
完整的PCDF架构:
三 关键技术
渐进融合机制:
(1)高层特征 → 双线性上采样 → 与低层特征逐级融合
(2)保留原始分辨率
(3)防止信息退化:跳层连接 + 跨尺度拼接
动态滤波优势:
| 传统方法 | PCDF |
|---|---|
| 固定卷积核 | 内容自适应校准 |
| 人工设计参数 | 空间连续性建模 |
| 单一尺度处理 | 多尺度渐进优化 |
参数量控制:
通道压缩:CSF 中 /2结构
轻量 MLP:CCM 的通道缩减比1/4
四 实际应用
U-net++网络中
class UNetPP_with_PCDF(nn.Module):def __init__(self):super().__init__()self.encoder = ResNetBackbone() # 任意骨干网络self.pcdf = PCDF(feats=[64, 128, 256])self.decoder = AttentionDecoder()def forward(self, x):feats = self.encoder(x) # 获取多尺度特征 [f1, f2, f3]pcdf_out = self.pcdf(feats)return self.decoder(pcdf_out)
五 优化策略
(1)使用深度可分离卷积替代标准卷积
nn.Conv2d(in_ch, out_ch, 3, groups=in_ch) # 参数量减少为1/in_ch
(2)早期特征剪枝:移除通道响应<0.1的特征层
(3)多尺度预测融合:在计算中引入残差
final_out = 0.4*output1 + 0.6*output2 # 加权融合
该模块特别适用于视频医疗图像分割任务,可通过替换骨干网络灵活扩展到其他领域(如自动驾驶场景解析)。