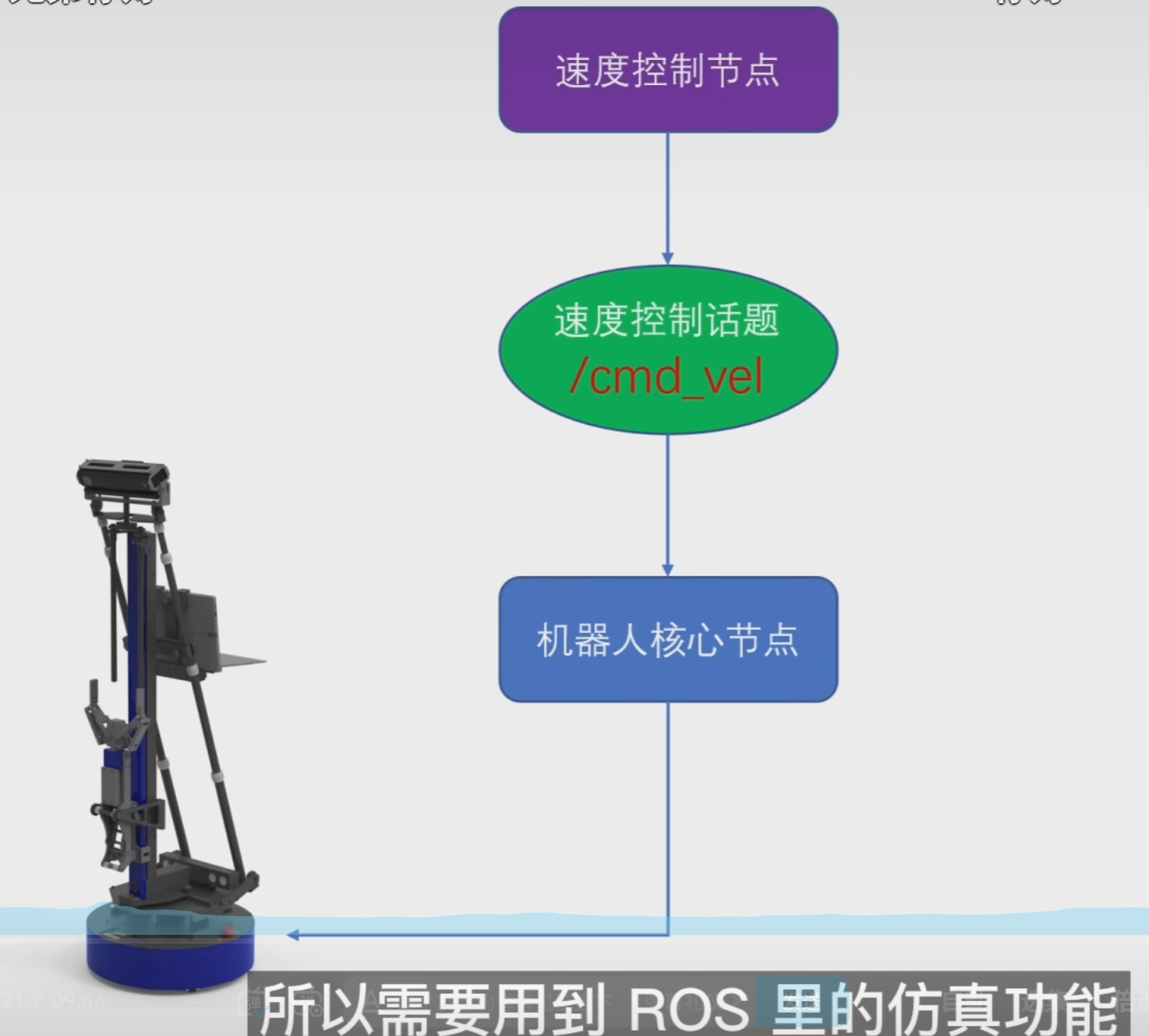
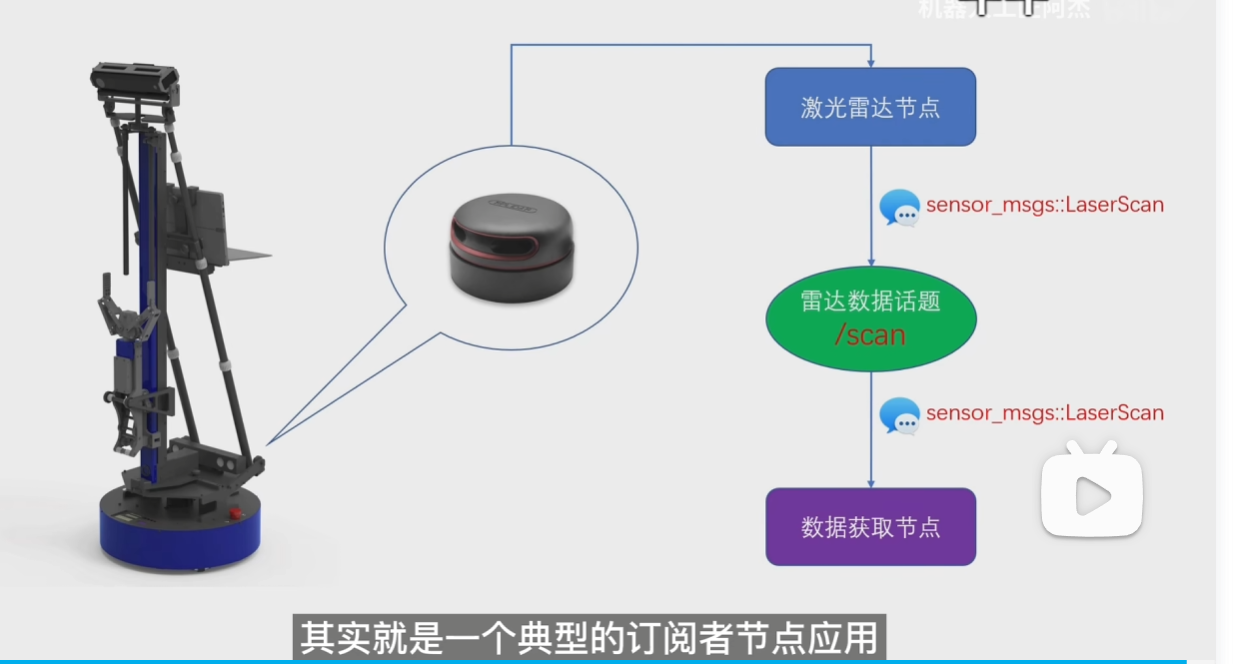
当前位置: 首页 > news >正文 Ros(控制机器人运动) news 2025/8/21 21:22:35 就是 俩节点 一个发布 一个接受。 然后接受方(仿真内 接受到 自动就是电机协议自动启动) )————— 激光雷达接受信息 查看全文 http://www.dtcms.com/a/231992.html 相关文章: c++提升 系统巡检常见工作 Python多线程编程:从GIL锁到实战优化 UE 5 和simulink联合仿真,如果先在UE5这一端结束Play,过一段时间以后**Unreal Engine 5** 中会出现显存不足错误 深入解析Java17核心新特性(增强NullPointerException、强封装 JDK 内部 API、伪随机数生成器增强) Makefile基础入门:从编译小白到自动化构建达人 沉金PCB电路板制造有哪些操作要点需要注意? 线程的生命周期与数量设置 【TCP/IP和OSI模型以及区别——理论汇总】 【工具使用】STM32CubeMX-FreeRTOS操作系统-任务、延时、定时器篇 DINO-R1 C语言-指针基础概念 leetcode题解236:二叉树的最近公共祖先 Elasticsearch中什么是分析器(Analyzer)?它由哪些组件组成? JS利用原型链实现继承 【leetcode】9. 回文数 (每日一道算法题)求根节点到叶节点数字之和 Java-IO流之字符输出流详解 qiankun模式下 主应用严格模式,子应用el-popover 点击无效不显示 GAN训练困境与模型分类:损失值异常与生成判别模型差异解析 第八部分:第六节 - 状态管理 (基础):协调多个界面的状态 基于 ShardingSphere + Seata 的最终一致性事务完整示例实现 局部变量-线程安全 深度学习项目之RT-DETR训练自己数据集 【docker】容器技术如何改变软件开发与部署格局 CMake在VS中使用远程调试 PocketFlow 快速入门指南 【仿生】硬件缺失,与组装调试,皮肤问题 【C/C++】入门grpc的idl 【算法训练营Day06】哈希表part2