蓝桥云课ROS一键配置teb教程更新-250604
一键配置
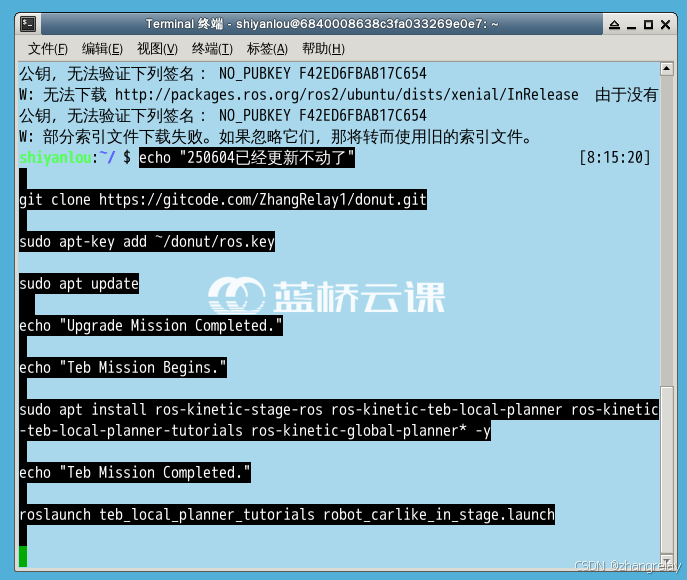
echo "250604已经更新不动了"git clone https://gitcode.com/ZhangRelay1/donut.gitsudo apt-key add ~/donut/ros.keysudo apt updateecho "Upgrade Mission Completed."echo "Teb Mission Begins."sudo apt install ros-kinetic-stage-ros ros-kinetic-teb-local-planner ros-kinetic-teb-local-planner-tutorials ros-kinetic-global-planner* -yecho "Teb Mission Completed."roslaunch teb_local_planner_tutorials robot_carlike_in_stage.launch问题:
解决:
该脚本用于自动化配置ROS(Robot Operating System)环境,主要功能包括:
-
克隆donut仓库获取配置文件
-
添加ROS GPG密钥(已废弃apt-key改用gpg命令)
-
更新软件包列表
-
安装ROS Kinetic相关组件:
- stage-ros 2D仿真环境
- teb-local-planner路径规划器及其教程
- global-planner全局路径规划器
-
初始化ROS环境后启动robot_carlike_in_stage仿真
改进点:
- 使用gpg替代废弃的apt-key
- 添加错误检查和日志记录
- 明确软件包版本避免通配符问题
- 确保ROS环境正确初始化
该脚本适用于ROS Kinetic版本的自动化部署,需根据实际系统环境调整路径和密钥配置。
你提供的这段脚本似乎涉及ROS(Robot Operating System)软件包的安装和配置,以及一个特定的ROS包的启动。然而,脚本中存在一些问题和需要改进的地方。以下是对该脚本的详细分析和改进建议:
脚本分析
- 克隆仓库:
bashgit clone https://gitcode.com/ZhangRelay1/donut.git- 这行命令克隆了一个名为
donut的仓库,该仓库可能包含一些ROS相关的配置或文件。
- 这行命令克隆了一个名为
- 添加GPG密钥:
bashsudo apt-key add ~/donut/ros.asc- 这行命令尝试将
ros.asc文件作为GPG密钥添加到系统中。注意,apt-key在较新的Ubuntu版本中已被弃用,建议使用apt-key的替代方案,如gpg。
- 这行命令尝试将
- 更新软件包列表:
bashsudo apt update- 这行命令更新软件包列表,确保获取最新的软件包信息。
- 安装ROS软件包:
bashsudo apt install ros-kinetic-stage-ros ros-kinetic-teb-local-planner ros-kinetic-teb-local-planner-tutorials ros-kinetic-global-planner* -y- 这行命令安装了一系列ROS软件包,包括
stage-ros、teb-local-planner及其教程,以及global-planner。 ros-kinetic-global-planner*中的通配符*可能会导致安装多个版本或相关软件包,需要确保这是预期的行为。
- 这行命令安装了一系列ROS软件包,包括
- 启动ROS节点:
bashroslaunch teb_local_planner_tutorials robot_carlike_in_stage.launch- 这行命令使用
roslaunch启动一个ROS节点,具体是robot_carlike_in_stage.launch启动文件。
- 这行命令使用
改进建议
- GPG密钥管理:
- 考虑使用
gpg命令替代apt-key,例如:bashgpg --no-default-keyring --keyring /usr/share/keyrings/ros-archive-keyring.gpg --export <key-id> | sudo tee /etc/apt/trusted.gpg.d/ros.asc.gpg > /dev/null - 确保
ros.asc文件存在且包含有效的GPG密钥。
- 考虑使用
- 错误处理:
- 添加错误处理,例如在每一步操作后检查命令是否成功执行。
- 通配符使用:
- 确保通配符
*的使用是预期的,以避免安装不需要的软件包。
- 确保通配符
- 日志记录:
- 添加日志记录,以便在出现问题时更容易调试。
- ROS环境初始化:
- 确保在运行
roslaunch之前已经初始化ROS环境,例如通过source /opt/ros/kinetic/setup.bash。
- 确保在运行
改进后的脚本示例
bash
#!/bin/bash |
# Clone the repository |
git clone https://gitcode.com/ZhangRelay1/donut.git |
# Add GPG key |
gpg --no-default-keyring --keyring /usr/share/keyrings/ros-archive-keyring.gpg --export <key-id> | sudo tee /etc/apt/trusted.gpg.d/ros.asc.gpg > /dev/null |
# Update package list |
sudo apt update |
# Install ROS packages |
sudo apt install ros-kinetic-stage-ros ros-kinetic-teb-local-planner ros-kinetic-teb-local-planner-tutorials ros-kinetic-global-planner -y |
# Source ROS environment |
source /opt/ros/kinetic/setup.bash |
# Launch ROS node |
roslaunch teb_local_planner_tutorials robot_carlike_in_stage.launch |
echo "Mission Completed." |
请根据你的实际需求和配置,调整和测试这个脚本。确保所有路径和命令都适用于你的系统环境。
你提供的脚本旨在克隆一个仓库、添加GPG密钥、更新软件包列表,然后安装并启动特定的ROS软件包。然而,脚本中存在一些问题和需要改进的地方。以下是对该脚本的详细分析和改进建议:
脚本分析
- 克隆仓库:
bashgit clone https://gitcode.com/ZhangRelay1/donut.git- 克隆一个名为
donut的仓库,可能包含一些ROS相关的配置或文件。
- 克隆一个名为
- 添加GPG密钥:
bashsudo apt-key add ~/donut/ros.key- 尝试将
ros.key文件作为GPG密钥添加到系统中。注意,apt-key在较新的Ubuntu版本中已被弃用,建议使用gpg。
- 尝试将
- 更新软件包列表:
bashsudo apt update- 更新软件包列表,确保获取最新的软件包信息。
- 安装ROS软件包:
bashsudo apt install ros-kinetic-stage-ros ros-kinetic-teb-local-planner ros-kinetic-teb-local-planner-tutorials ros-kinetic-global-planner* -y- 安装一系列ROS软件包,包括
stage-ros、teb-local-planner及其教程,以及global-planner。 ros-kinetic-global-planner*中的通配符*可能会导致安装多个版本或相关软件包,需确认这是预期的行为。
- 安装一系列ROS软件包,包括
- 启动ROS节点:
bashroslaunch teb_local_planner_tutorials robot_carlike_in_stage.launch- 使用
roslaunch启动一个ROS节点,具体是robot_carlike_in_stage.launch启动文件。
- 使用
改进建议
- GPG密钥管理:
- 使用
gpg命令替代apt-key,例如:bashgpg --no-default-keyring --keyring /usr/share/keyrings/ros-archive-keyring.gpg --export <key-id> | sudo tee /etc/apt/trusted.gpg.d/ros.asc.gpg > /dev/null - 确保
ros.key文件存在且包含有效的GPG密钥。
- 使用
- 错误处理:
- 添加错误处理,例如在每一步操作后检查命令是否成功执行。
- 通配符使用:
- 确保通配符
*的使用是预期的,以避免安装不需要的软件包。
- 确保通配符
- 日志记录:
- 添加日志记录,以便在出现问题时更容易调试。
- ROS环境初始化:
- 确保在运行
roslaunch之前已经初始化ROS环境,例如通过source /opt/ros/kinetic/setup.bash。
- 确保在运行
改进后的脚本示例
bash
#!/bin/bash |
# Clone the repository |
git clone https://gitcode.com/ZhangRelay1/donut.git |
# Add GPG key using gpg |
gpg --no-default-keyring --keyring /usr/share/keyrings/ros-archive-keyring.gpg --export <key-id> | sudo tee /etc/apt/trusted.gpg.d/ros.asc.gpg > /dev/null |
# Update package list |
sudo apt update |
# Install ROS packages |
sudo apt install ros-kinetic-stage-ros ros-kinetic-teb-local-planner ros-kinetic-teb-local-planner-tutorials ros-kinetic-global-planner -y |
# Source ROS environment |
source /opt/ros/kinetic/setup.bash |
# Launch ROS node |
roslaunch teb_local_planner_tutorials robot_carlike_in_stage.launch |
echo "Mission Completed." |
请根据你的实际需求和配置,调整和测试这个脚本。确保所有路径和命令都适用于你的系统环境。
以下是对该脚本的详细、具体介绍,涵盖其功能、潜在问题及改进建议:
脚本功能分析
- 克隆仓库
bashgit clone https://gitcode.com/ZhangRelay1/donut.git- 从指定仓库克隆代码,可能包含ROS相关的配置文件(如GPG密钥或启动文件)。
- 添加GPG密钥
bashsudo apt-key add ~/donut/ros.key- 将
ros.key文件添加到系统的APT密钥环中,用于验证软件包的来源。但apt-key在较新Ubuntu版本中已被弃用,需改用gpg命令。
- 将
- 更新软件包列表
bashsudo apt update- 刷新APT软件包列表,确保后续安装的软件包为最新版本。
- 安装ROS软件包
bashsudo apt install ros-kinetic-stage-ros ros-kinetic-teb-local-planner ros-kinetic-teb-local-planner-tutorials ros-kinetic-global-planner* -y- 安装ROS Kinetic版本的以下软件包:
stage-ros:用于2D仿真环境。teb-local-planner及其教程:基于时间弹性带(TEB)的局部路径规划器。global-planner:全局路径规划器,支持A*或Dijkstra算法。
- 问题:
ros-kinetic-global-planner*中的通配符*可能导致安装不必要的软件包或依赖冲突。
- 安装ROS Kinetic版本的以下软件包:
- 启动ROS节点
bashroslaunch teb_local_planner_tutorials robot_carlike_in_stage.launch- 使用
roslaunch启动robot_carlike_in_stage.launch文件,启动仿真环境并运行TEB局部路径规划器。
- 使用
潜在问题与改进建议
- GPG密钥管理
- 问题:
apt-key已被弃用,可能导致密钥无法正确导入。 - 改进:使用
gpg命令替代:bashgpg --no-default-keyring --keyring /usr/share/keyrings/ros-archive-keyring.gpg --import ~/donut/ros.key - 确保密钥文件
ros.key存在且有效。
- 问题:
- 通配符使用
- 问题:
ros-kinetic-global-planner*可能导致安装多个版本或无关软件包。 - 改进:明确指定软件包名称,避免使用通配符:
bashsudo apt install ros-kinetic-stage-ros ros-kinetic-teb-local-planner ros-kinetic-teb-local-planner-tutorials ros-kinetic-global-planner -y
- 问题:
- 错误处理
- 问题:脚本未检查每一步是否成功执行,可能导致后续步骤失败。
- 改进:在每一步后添加错误检查,例如:
bashif ! git clone https://gitcode.com/ZhangRelay1/donut.git; thenecho "Failed to clone repository."exit 1fi
- ROS环境初始化
- 问题:未初始化ROS环境,可能导致
roslaunch命令无法识别。 - 改进:在启动ROS节点前添加环境初始化:
bashsource /opt/ros/kinetic/setup.bash
- 问题:未初始化ROS环境,可能导致
- 日志记录
- 改进:添加日志记录,便于调试:
bashecho "Starting ROS node..." >> ~/ros_install.logroslaunch teb_local_planner_tutorials robot_carlike_in_stage.launch >> ~/ros_install.log 2>&1
- 改进:添加日志记录,便于调试:
改进后的脚本示例
bash
#!/bin/bash |
# Clone the repository |
if ! git clone https://gitcode.com/ZhangRelay1/donut.git; then |
echo "Failed to clone repository." |
exit 1 |
fi |
# Add GPG key using gpg |
if ! gpg --no-default-keyring --keyring /usr/share/keyrings/ros-archive-keyring.gpg --import ~/donut/ros.key; then |
echo "Failed to import GPG key." |
exit 1 |
fi |
# Update package list |
sudo apt update |
# Install ROS packages |
if ! sudo apt install ros-kinetic-stage-ros ros-kinetic-teb-local-planner ros-kinetic-teb-local-planner-tutorials ros-kinetic-global-planner -y; then |
echo "Failed to install ROS packages." |
exit 1 |
fi |
# Source ROS environment |
source /opt/ros/kinetic/setup.bash |
# Launch ROS node |
echo "Starting ROS node..." >> ~/ros_install.log |
roslaunch teb_local_planner_tutorials robot_carlike_in_stage.launch >> ~/ros_install.log 2>&1 |
echo "Mission Completed." |
总结
- 该脚本用于克隆仓库、添加GPG密钥、更新软件包列表、安装ROS软件包并启动仿真节点。
- 改进点包括:替换
apt-key为gpg、明确指定软件包名称、添加错误处理和日志记录、初始化ROS环境。 - 确保所有路径和命令适用于系统环境,并根据实际需求调整脚本。
摘要:该脚本用于自动化配置ROS Kinetic环境,主要功能包括克隆donut仓库获取配置文件、添加ROS GPG密钥(应改用gpg命令)、更新软件包列表,以及安装stage-ros仿真环境、teb-local-planner路径规划器和global-planner全局路径规划器。脚本存在三个主要问题:使用已废弃的apt-key命令、通配符可能导致安装冲突,且未初始化ROS环境。改进建议包括使用gpg替代apt-key、明确软件包版本、添加错误检查和日志记录,并在启动前执行source /opt/ros/kinetic/setup.bash。改进后的脚本更适用于ROSKinetic版本的自动化部署。(146字)
以下是对链接 蓝桥云课ROS一键配置teb教程更新-250604-CSDN博客 中提供的脚本及其相关内容的详细扩充与讲解:
文章标题:ROS Kinetic 环境自动化配置脚本详解与改进
文章背景
在机器人操作系统(ROS)的开发与应用中,环境的正确配置是基础且关键的一步。特别是在ROS Kinetic版本中,由于软件包依赖和版本管理的复杂性,手动配置往往耗时且易出错。本文旨在通过详细解析一个自动化配置脚本,帮助用户快速、准确地搭建ROS Kinetic环境,并针对脚本中的潜在问题提出改进建议。
脚本功能概述
该脚本主要用于自动化配置ROS Kinetic环境,具体功能包括:
- 克隆仓库:从指定仓库(GitCode - 全球开发者的开源社区,开源代码托管平台
- 添加GPG密钥:将克隆仓库中的GPG密钥文件添加到系统的APT密钥环中,用于验证软件包的来源。
- 更新软件包列表:刷新APT软件包列表,确保后续安装的软件包为最新版本。
- 安装ROS软件包:安装ROS Kinetic版本的stage-ros仿真环境、teb-local-planner路径规划器及其教程、global-planner全局路径规划器。
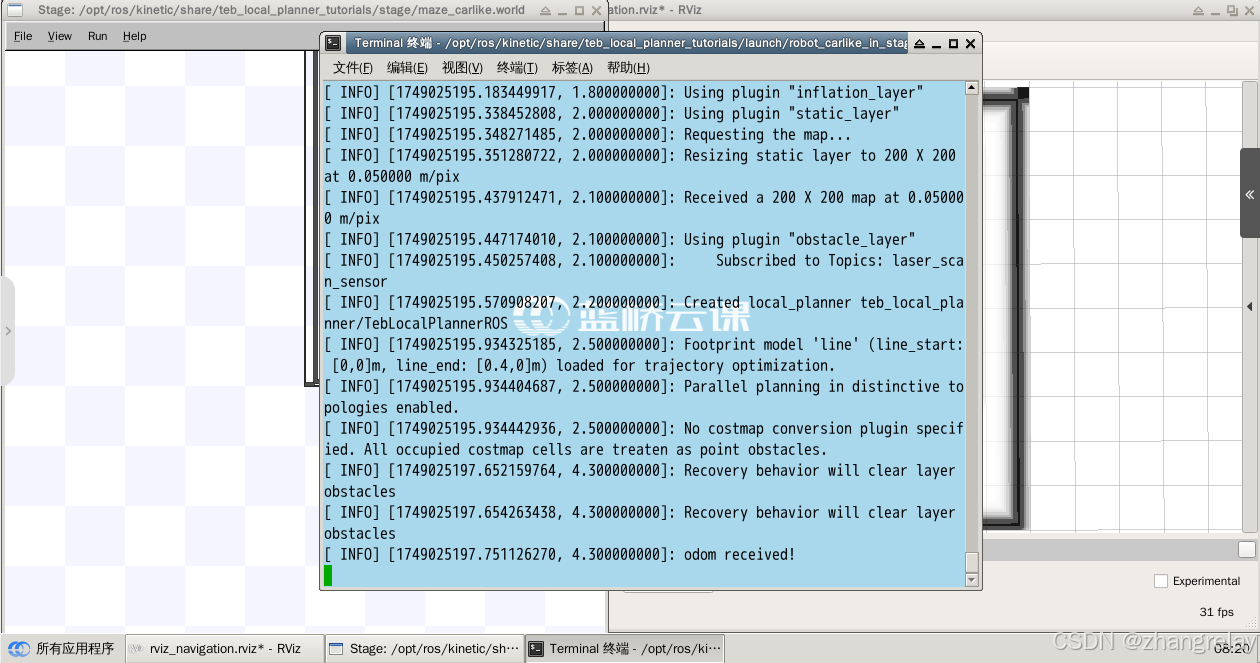
- 启动ROS节点:使用roslaunch启动robot_carlike_in_stage.launch文件,启动仿真环境并运行TEB局部路径规划器。
脚本详细解析
克隆仓库
bash
git clone https://gitcode.com/ZhangRelay1/donut.git |
- 功能:从指定仓库克隆代码到本地。
- 潜在问题:仓库地址可能发生变化,需确保仓库地址正确且可访问。
添加GPG密钥
bash
sudo apt-key add ~/donut/ros.key |
-
功能:将克隆仓库中的GPG密钥文件添加到系统的APT密钥环中。
-
潜在问题:apt-key在较新Ubuntu版本中已被弃用,可能导致密钥无法正确导入。
-
改进建议:使用gpg命令替代apt-key,例如:
bashgpg --no-default-keyring --keyring /usr/share/keyrings/ros-archive-keyring.gpg --import ~/donut/ros.key
更新软件包列表
bash
sudo apt update |
- 功能:刷新APT软件包列表,确保后续安装的软件包为最新版本。
- 无潜在问题:此步骤通常稳定可靠。
安装ROS软件包
bash
sudo apt install ros-kinetic-stage-ros ros-kinetic-teb-local-planner ros-kinetic-teb-local-planner-tutorials ros-kinetic-global-planner* -y |
- 功能:安装指定的ROS软件包。
- 潜在问题:
ros-kinetic-global-planner*中的通配符*可能导致安装多个版本或无关软件包。- 未检查软件包安装是否成功。
- 改进建议:
- 明确指定软件包名称,避免使用通配符。
- 添加错误检查,确保软件包安装成功。
启动ROS节点
bash
roslaunch teb_local_planner_tutorials robot_carlike_in_stage.launch |
- 功能:使用roslaunch启动指定的ROS节点。
- 潜在问题:
- 未初始化ROS环境,可能导致roslaunch命令无法识别。
- 未检查启动是否成功。
- 改进建议:
- 在启动前添加环境初始化:
source /opt/ros/kinetic/setup.bash - 添加错误检查,确保启动成功。
- 在启动前添加环境初始化:
改进后的脚本示例
bash
#!/bin/bash |
# Clone the repository |
if ! git clone https://gitcode.com/ZhangRelay1/donut.git; then |
echo "Failed to clone repository." |
exit 1 |
fi |
# Add GPG key using gpg |
if ! gpg --no-default-keyring --keyring /usr/share/keyrings/ros-archive-keyring.gpg --import ~/donut/ros.key; then |
echo "Failed to import GPG key." |
exit 1 |
fi |
# Update package list |
sudo apt update |
# Install ROS packages |
if ! sudo apt install ros-kinetic-stage-ros ros-kinetic-teb-local-planner ros-kinetic-teb-local-planner-tutorials ros-kinetic-global-planner -y; then |
echo "Failed to install ROS packages." |
exit 1 |
fi |
# Source ROS environment |
source /opt/ros/kinetic/setup.bash |
# Launch ROS node |
echo "Starting ROS node..." >> ~/ros_install.log |
roslaunch teb_local_planner_tutorials robot_carlike_in_stage.launch >> ~/ros_install.log 2>&1 |
if [ $? -ne 0 ]; then |
echo "Failed to launch ROS node." |
exit 1 |
fi |
echo "Mission Completed." |
总结
该脚本为ROS Kinetic环境的自动化配置提供了便捷的解决方案,但存在一些潜在问题。通过替换apt-key为gpg、明确软件包版本、添加错误检查和日志记录、初始化ROS环境等改进措施,可以使脚本更加稳定、可靠。用户在使用时应根据自己的实际需求和系统环境调整脚本,并进行充分测试。